

MUWEIDU L6030 Motor Servo DC Sin Escobillas 24V Codificador 18 bits RS485/CAN 100rpm 0.79 N.m (Φ58×26mm)
MUWEIDU L6030 Motor Servo DC Sin Escobillas 24V Codificador 18 bits RS485/CAN 100rpm 0.79 N.m (Φ58×26mm)
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU El motor L6030 es un motor servo de CC sin escobillas de baja velocidad y alta precisión diseñado para el control de velocidad/posición en robótica y sistemas de automatización compactos. Cuenta con un sistema de accionamiento eléctrico integrado, retroalimentación de codificador de 18 bits, monitoreo de temperatura del motor y comunicación RS485 o CAN para la integración del controlador.
&Características clave- Posicionamiento de la serie: motores de CC sin escobillas de alta precisión de baja velocidad; mini servomotores
- Diseño de eje hueco
- Operación estable & suave
- Certificado CE
- Alta precisión integrada; construcción ligera; alto rendimiento de par
- Sistema de accionamiento eléctrico integrado con MCU de 32 bits
- Materiales del motor principal: láminas de acero silicio de primera calidad y imanes permanentes de alto rendimiento resistentes a altas temperaturas
- Diseño de rotor exterior aplanado en múltiples etapas para un mayor par en aplicaciones con espacio limitado
- Estructura sin escobillas con rodamientos de alto rendimiento para una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento térmico para muestreo y control de corriente precisos
- Controlador de puente completo de tres fases N-channel completo (baja resistencia interna, alta salida de corriente)
- Soporta el cambio sin problemas entre los modos de control de par en bucle abierto, velocidad y posición
- Disponibilidad de ajuste/prueba de parámetros/actualización de firmware basado en PC; compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara de 360°
- Cámara de mano
- LiDAR
- Gimbal
Especificaciones
| Modelo | L6030 |
| Tensión nominal | 24V |
| Corriente nominal | 1.28A |
| Pico de Potencia | 9.8W |
| Par Nominal | 0.79 N.m |
| Pico de Par | 1.12 N.m |
| Velocidad Calificada | 100rpm |
| Encoder | 18bit |
| Inercia del Rotor | 515 gcm² |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Φ58mm×26mm |
| Peso | 242g |
Definición de Interfaz
- Interruptor ID: INTERRUPTOR ID
- Conector: CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa | V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Modos de control (Software)
- Modo de par
- Modo de velocidad
- Modo de control de múltiples vueltas
- Modo de posición + dirección de una sola vuelta
- Modo de posición incremental
- Modo de control de múltiples vueltas (con límite de velocidad)
- Modo de posición + dirección de una sola vuelta (con límite de velocidad)
- Modo de posición incremental (con límite de velocidad)
Manuales
Para soporte de integración y preguntas de pre-venta (cableado, selección de RS485/CAN y configuración de parámetros), contacta [email protected] or visita https://rcdrone.top/.
Detalles

Diseñado para robótica compacta, la serie L6030 combina un formato de eje hueco con un rendimiento de servo estable y suave a baja velocidad.

Una arquitectura de accionamiento integrada soporta un control preciso de velocidad/posición mientras mantiene el motor compacto y eficiente.

El etiquetado claro de la interfaz ayuda a simplificar el cableado para la comunicación RS485/CAN y las conexiones de energía durante la integración.
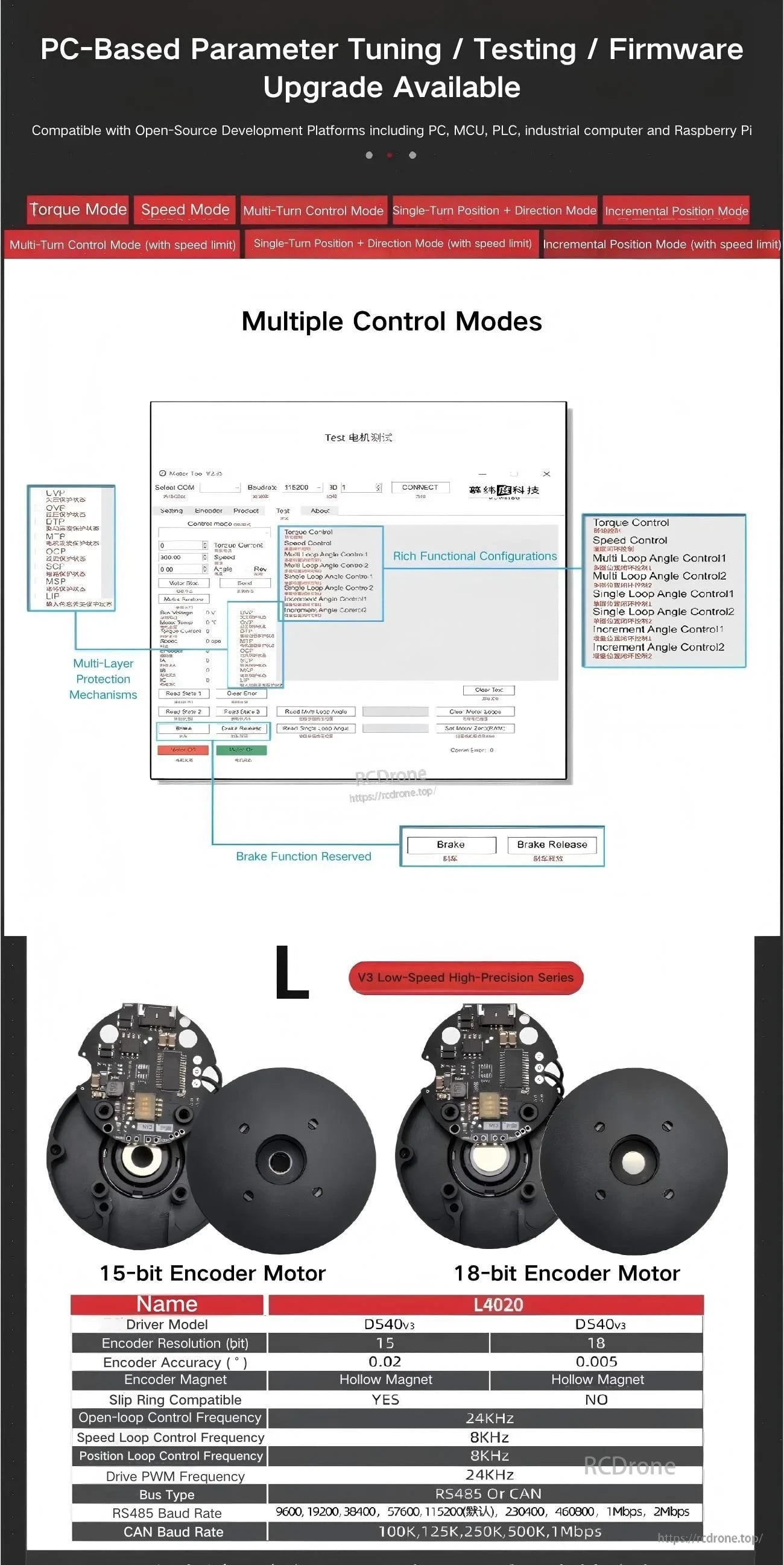
Las herramientas basadas en PC permiten la sintonización de parámetros, pruebas y actualizaciones de firmware, con soporte para modos de torque, velocidad y posición.
Un ajuste práctico para sistemas de imagen y detección estabilizados, como cámaras de 360°, gimbals y plataformas LiDAR.
Related Collections

