

Motor sin escobillas MUWEIDU L9030 DC Servo 24V 160rpm 1N.m RS485/CAN Encoder 15/18bit
Motor sin escobillas MUWEIDU L9030 DC Servo 24V 160rpm 1N.m RS485/CAN Encoder 15/18bit
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU El motor L9030 es un motor servo de CC sin escobillas de baja velocidad y alta precisión diseñado para el control de posición y velocidad en proyectos de robótica y automatización. Las características destacadas de la serie incluyen un diseño de eje hueco, operación estable & y suave, y etiquetado certificado por CE. Para asistencia en integración, acceso a documentación o preguntas previas a la venta, contacta [email protected] or visita https://rcdrone.top/.
Características Clave
- Posicionamiento de la serie: “Serie de Motores de CC Sin Escobillas de Baja Velocidad y Alta Precisión” / “Mini Motores Servo”
- Diseño de eje hueco
- Operación estable & suave
- Certificado CE (texto de etiqueta)
- Alta precisión integrada; construcción ligera; alto rendimiento de par (texto de etiqueta)
- Diseñado con estándares ultra-altos (texto de etiqueta)
- Características del motor del sistema de accionamiento eléctrico integrado (texto de etiqueta)
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión (texto de etiqueta)
- Materiales principales (texto de etiqueta): láminas de acero silicio premium y imanes permanentes de alto rendimiento resistentes a altas temperaturas
- Diseño de rotor exterior aplanado en múltiples etapas que ofrece un mayor par, ideal para aplicaciones con limitaciones de espacio (texto de etiqueta)
- Estructura sin escobillas combinada con rodamientos de alto rendimiento para una rotación más suave y una vida útil más larga (texto de etiqueta)
- Resistencias de aleación de alta precisión y bajo desplazamiento térmico para muestreo y control de corriente precisos (texto de etiqueta)
- El controlador de puente completo de tres fases N-channel presenta baja resistencia interna y alta salida de corriente (texto de etiqueta)
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición (texto de etiqueta)
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible (texto de etiqueta)
- Compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi (texto de etiqueta)
Escenarios de Aplicación
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Modelo | L9030 |
| Tensión nominal | 24V |
| Corriente nominal | 1.85A |
| Potencia máxima | 1.8W |
| Par nominal | 1N.m |
| Par máximo | 2.2N.m |
| Velocidad Calificada | 160rpm |
| Encoder | 15bit o 18bit |
| Inercia del Rotor | 2860gcm^2 |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Phi89mm x 37mm |
| Peso | 510g |
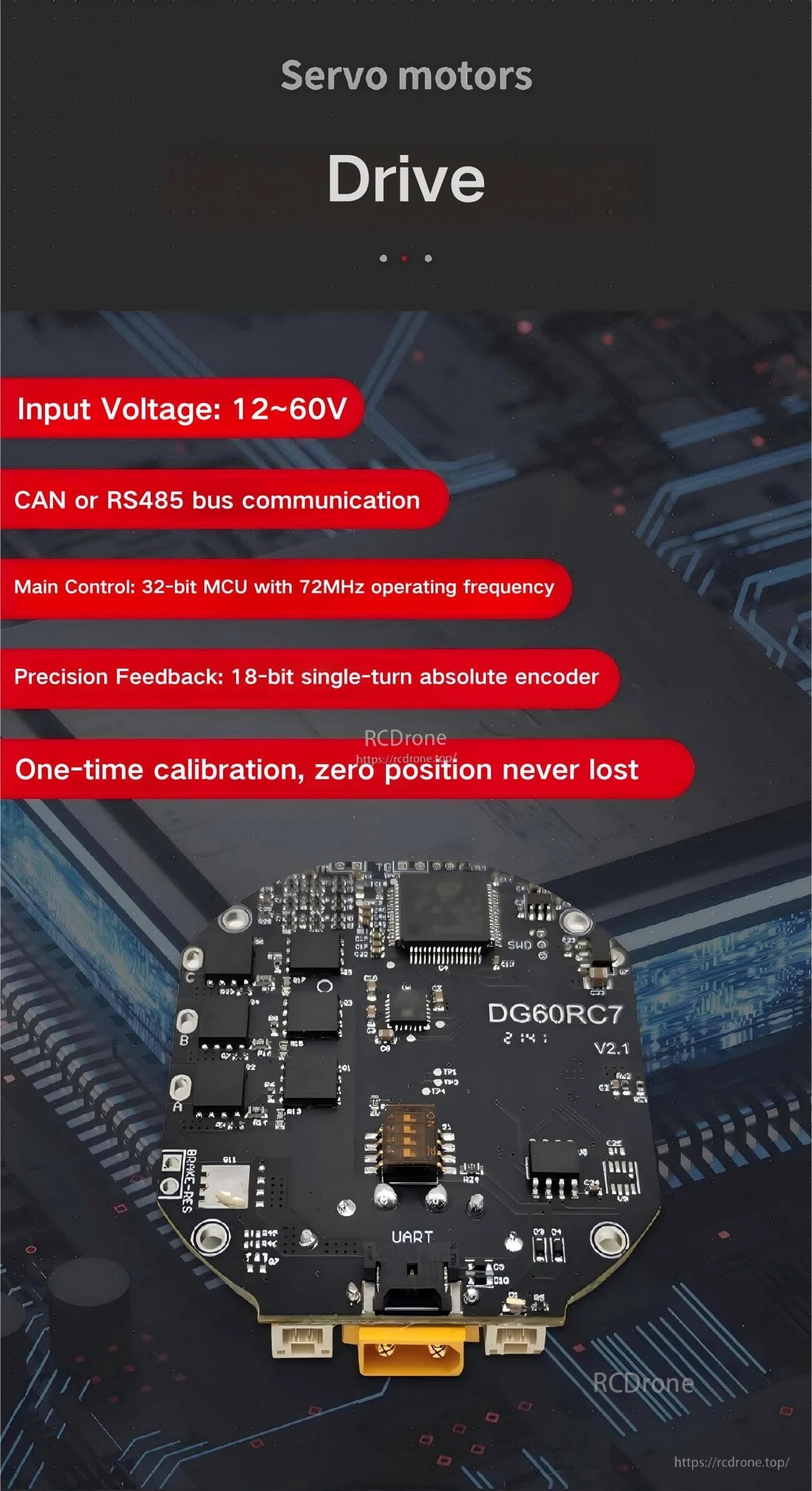
Conducción / Control (Texto de Etiqueta de Imágenes)
- Tensión de Entrada: 12~60V
- Comunicación por bus CAN o RS485
- Control Principal: MCU de 32 bits con frecuencia de operación de 72MHz
- Retroalimentación de Precisión: encoder absoluto de una vuelta de 18 bits
- Calibración única, posición cero nunca perdida
Definición de Interfaz (Texto de Etiqueta de Imágenes)
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de Alimentación Positiva |
| V+ | Fuente de Alimentación Positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de Señal |
Otras etiquetas de interfaz mostradas: INTERRUPTOR ID; CAN/RS485.
Modos de Control (Texto de Etiqueta de Imágenes)
- Modo de Torque
- Modo de Velocidad
- Modo de Control de Múltiples Giros
- Modo de Posición + Dirección de Un Solo Giro
- Modo de Posición Incremental
- Modo de Control de Múltiples Giros (con límite de velocidad)
- Modo de Posición + Dirección de Un Solo Giro (con límite de velocidad)
- Modo de Posición Incremental (con límite de velocidad)
Manuales / Documentos
Detalles

Diseñado para robótica compacta y juntas de automatización, la serie L9030 se centra en el control de baja velocidad y alta precisión con un factor de forma de eje hueco.

Materiales de núcleo premium, una estructura de rotor exterior y rodamientos suaves apoyan un funcionamiento estable, mientras que múltiples modos de control cubren torque, velocidad y posición.
El amplio soporte de voltaje de entrada y la conectividad CAN/RS485 ayudan a simplificar la integración con PC, MCU, PLC o controladores industriales.

El pinout del conector y el etiquetado del interruptor ID hacen que el cableado del bus y la dirección de los dispositivos sean más claros durante la instalación.
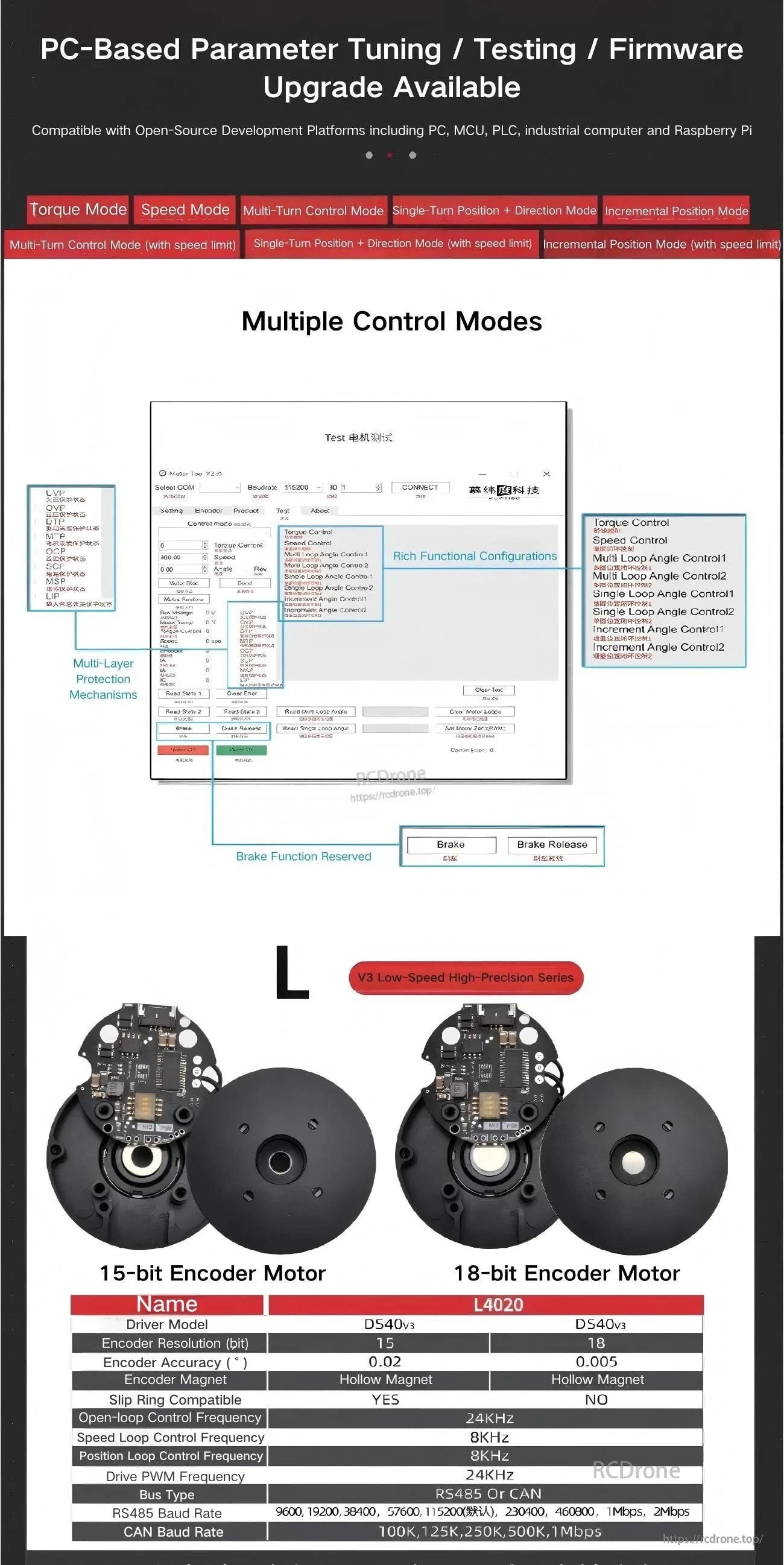
Las herramientas de PC soportan la sintonización de parámetros, pruebas y actualizaciones de firmware, con opciones de codificadores disponibles para diferentes necesidades de posicionamiento.

Related Collections

