

Motor MUWEIDU L9050 24V 20rpm BLDC Servo 2.5N.m RS485/CAN Codificador 15/18 bits 945g
Motor MUWEIDU L9050 24V 20rpm BLDC Servo 2.5N.m RS485/CAN Codificador 15/18 bits 945g
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU El motor L9050 es un motor servo de CC sin escobillas de baja velocidad y alta precisión diseñado para el control de velocidad/posición a través de comunicación RS485 o CAN. Soporta la sintonización/prueba de parámetros basada en PC y la actualización de firmware, y está posicionado para aplicaciones de accionamiento eléctrico integrado que requieren un posicionamiento preciso a baja velocidad.
Características Clave
- Serie de motores de CC sin escobillas de alta precisión y baja velocidad
- Diseño de eje hueco
- Operación estable y suave
- Certificado CE
- Alta precisión integrada
- Estructura ligera, alto rendimiento de par
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión
- MCU de alto rendimiento de 32 bits (Serie MS compatible con todos los comandos de control de la Serie MF)
- Hojas de acero silicio premium y imanes permanentes de alto rendimiento resistentes a altas temperaturas utilizados como materiales principales del motor
- Diseño de rotor exterior aplanado en múltiples etapas para un mayor par en aplicaciones con espacio limitado
- Estructura sin escobillas con rodamientos de alto rendimiento para una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento térmico para muestreo y control de corriente precisos
- Control completo de puente completo trifásico N-channel con baja resistencia interna y alta salida de corriente
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición
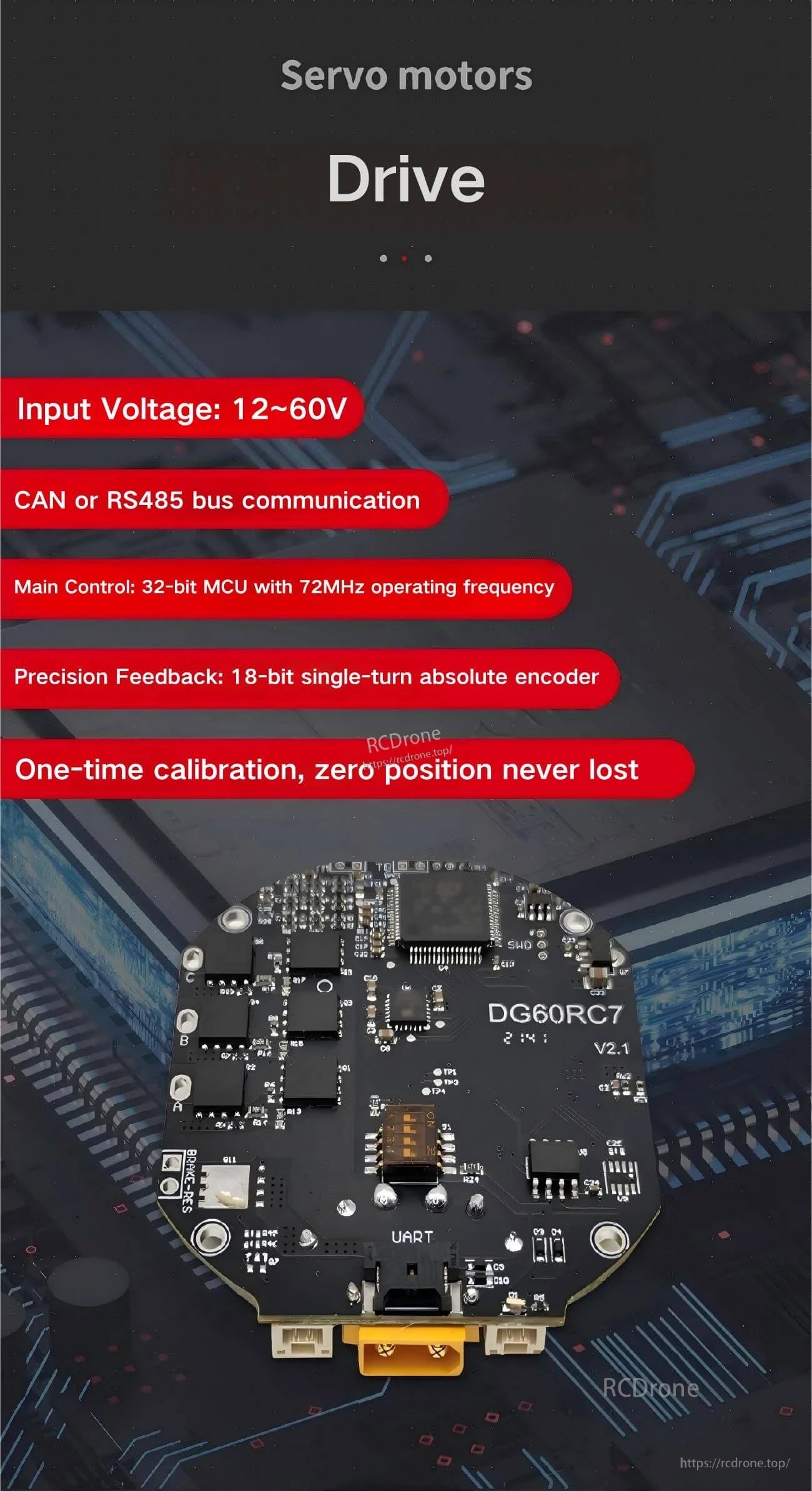
- Tensión de entrada (control): 12~60V
- Control principal (control): MCU de 32 bits con frecuencia de operación de 72MHz
- Retroalimentación de precisión (control): codificador absoluto de una vuelta de 18 bits
- Calibración única, posición cero nunca perdida
Especificaciones
| Modelo | L9050 |
| Tensión nominal | 24V |
| Corriente nominal | 1.78A |
| Potencia máxima | 10W |
| Par nominal | 2.5N.m |
| Par máximo | 3.4N. |
| Velocidad Calificada | 20rpm |
| Encoder | 15bit o 18bit |
| Inercia del Rotor | 4656gcm^2 |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Phi89mm x 53mm |
| Peso | 945g |
Definición de Interfaz
| SWITCH ID | Soportado |
| CAN/RS485 | Soportado |
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Escenarios de aplicación
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara 360°
- Cámara de mano
- LiDAR
- Gimbal
Manuales
Para orientación sobre cableado, soporte de integración o ayuda para acceder a documentos, contacta [email protected] or visita https://rcdrone.top/.
Detalles

Diseñado para un posicionamiento preciso a baja velocidad, la serie L9050 combina un diseño de eje hueco con una rotación estable y suave.

Los materiales principales y el diseño del motor se centran en la densidad de par, larga vida útil y control fiable de alta precisión a baja velocidad.
La comunicación por bus CAN/RS485 y la retroalimentación del encoder absoluto soportan el control de velocidad y posición con configuración basada en PC.

Referencia rápida para el interruptor ID y las asignaciones de pines de CAN/RS485 más alimentación y UART durante el cableado y la integración.
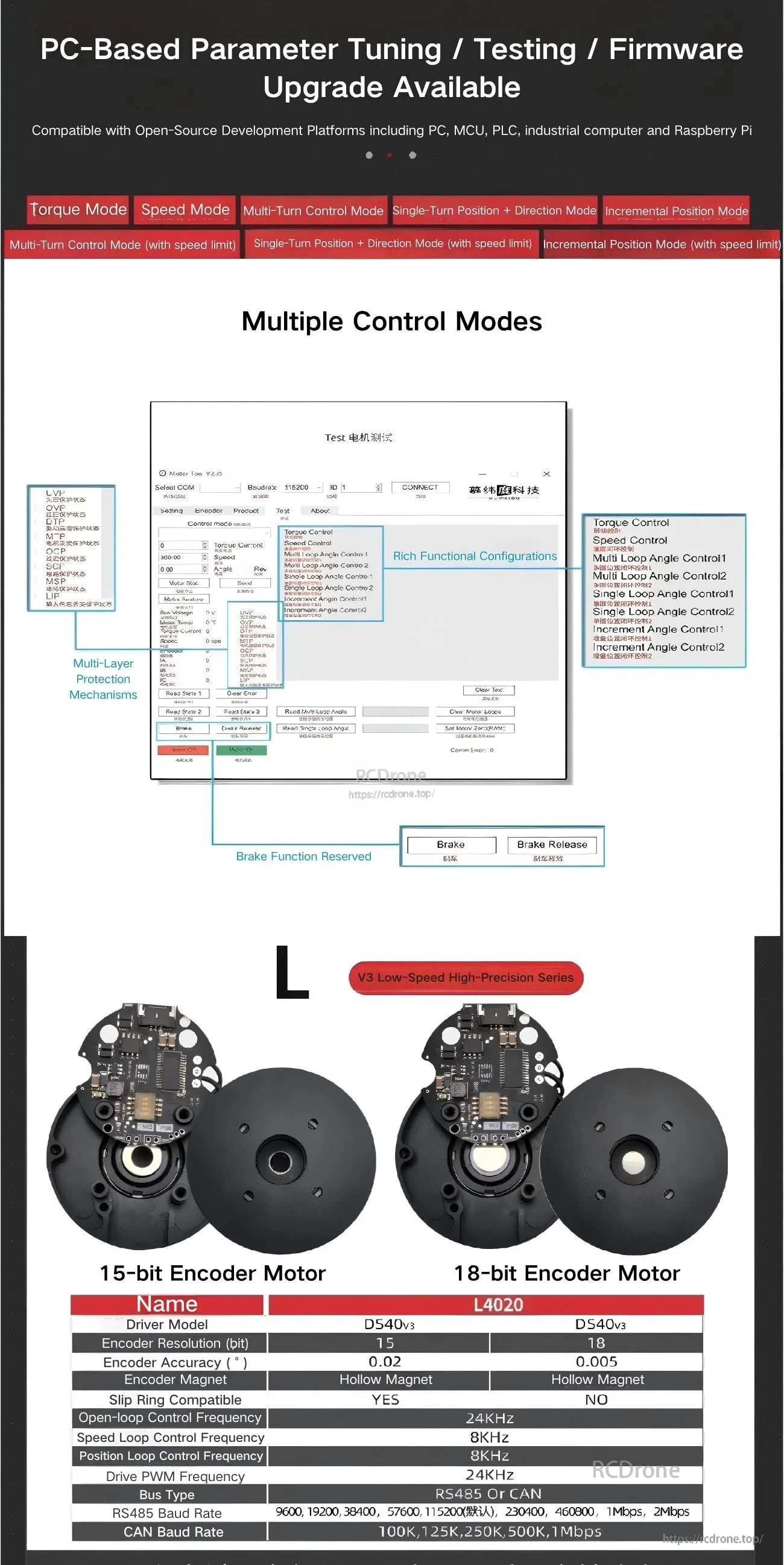
El ajuste de parámetros, pruebas y actualizaciones de firmware se pueden manejar en una PC, con múltiples modos de control y opciones de encoder disponibles.

Related Collections

