

MUWEIDU TS6013-36 24V Motor Compacto con Reductor Servo 1:36 RS485/CAN Codificador Absoluto de 18 bits
MUWEIDU TS6013-36 24V Motor Compacto con Reductor Servo 1:36 RS485/CAN Codificador Absoluto de 18 bits
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
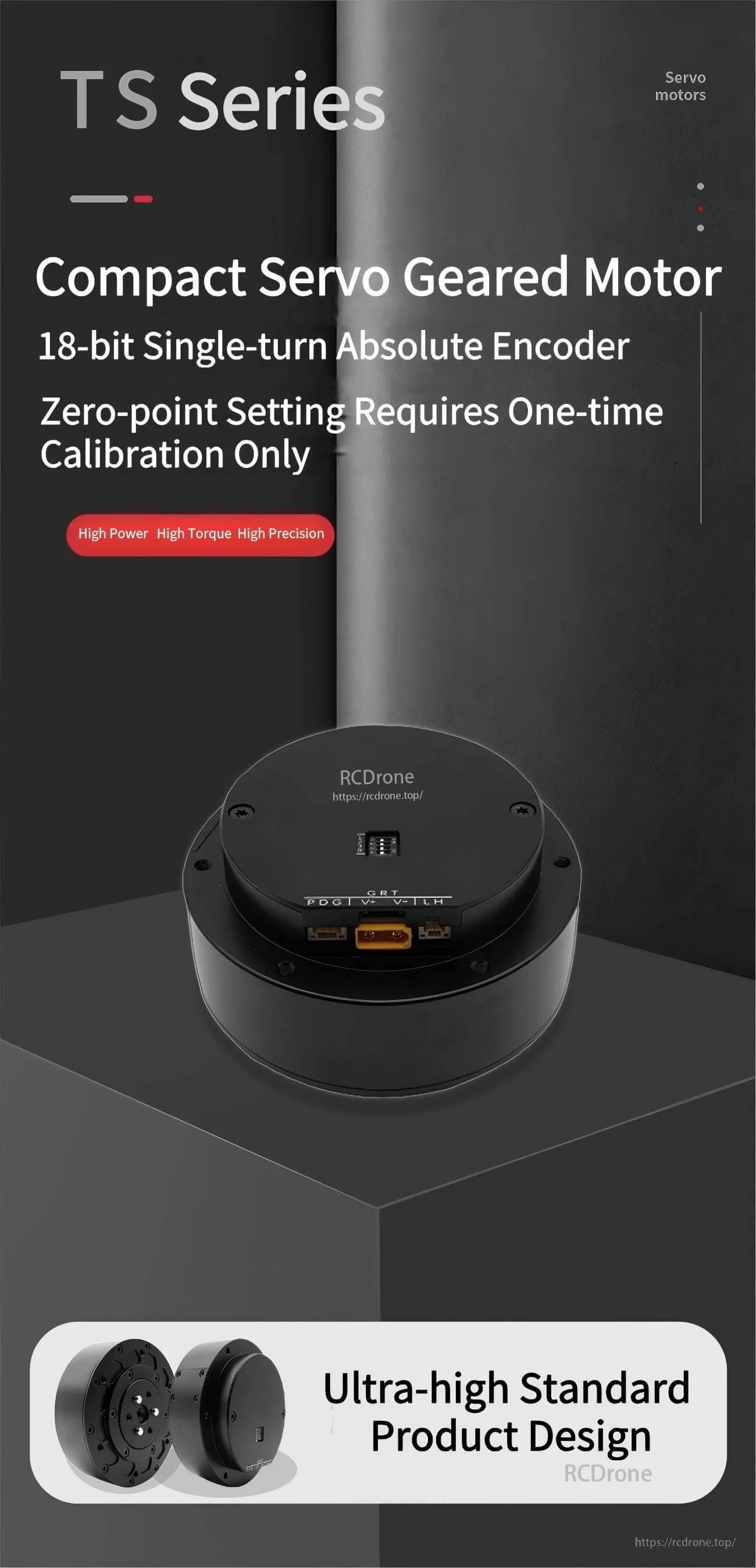
MUWEIDU El motor TS6013-36 es un motor de servo compacto con engranaje (motores de servo de la serie TS) diseñado como un sistema de accionamiento eléctrico integrado para robótica y automatización. Cuenta con un encoder absoluto de una vuelta de 18 bits y admite la configuración del punto cero con calibración única. Los modos de control incluyen par, velocidad y posición, con comunicación RS485/CAN.
Características Clave
- Motor de servo compacto con engranaje (motores de servo de la serie TS)
- Encoder absoluto de una vuelta de 18 bits
- La configuración del punto cero requiere una calibración única
- Arquitectura de sistema de accionamiento eléctrico integrado
- Motor sin escobillas de alta potencia + reductor planetario de alta precisión + controlador FOC de alto rendimiento
- Modos de control: Par/Velocidad/Posición
- Protocolo de comunicación: RS485/CAN
Especificaciones
| Modelo | TS6013-36 |
| Tensión Nominal | 24V |
| Corriente Nominal | 4.4A |
| Poder Pico | 160W |
| Par Nominal | 13N.m |
| Par Pico | 25N.m |
| Velocidad Calificada | 54rpm |
| Codificador | 18bit + 14bit |
| Inercia del Rotor | 850gcm^2 |
| Relación de Reducción | 1:36 |
| Modos de Control | Par/Velocidad/Posición |
| Protocolo de Comunicación | RS485/CAN |
| Dimensiones Generales | Φ63mm×54.5mm |
| Dimensiones generales (con freno) | Φ53mm×59mm |
| Peso | 460g |
| Peso (con freno) | 560g |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos / robots con patas
- Vehículos AGV
- Robots ARU
- Robots industriales
- Vehículos robóticos de inspección
- Robots médicos
Manuales / Descargas
- MUWEIDU_TS6013-36_Motor.STP
- MUWEIDU_TS6013-36_Diagrama_de_estructura_del_producto.pdf
- MUWEIDU_TS6013-36B_Diagrama_de_estructura_del_producto.pdf
Para soporte en cableado, integración o selección de modelos, contacta [email protected] or visita https://rcdrone.top/.
Detalles
Un motor servo con engranaje de la serie TS integrado combina un tamaño compacto con un encoder absoluto de 18 bits para un posicionamiento estable y repetible.
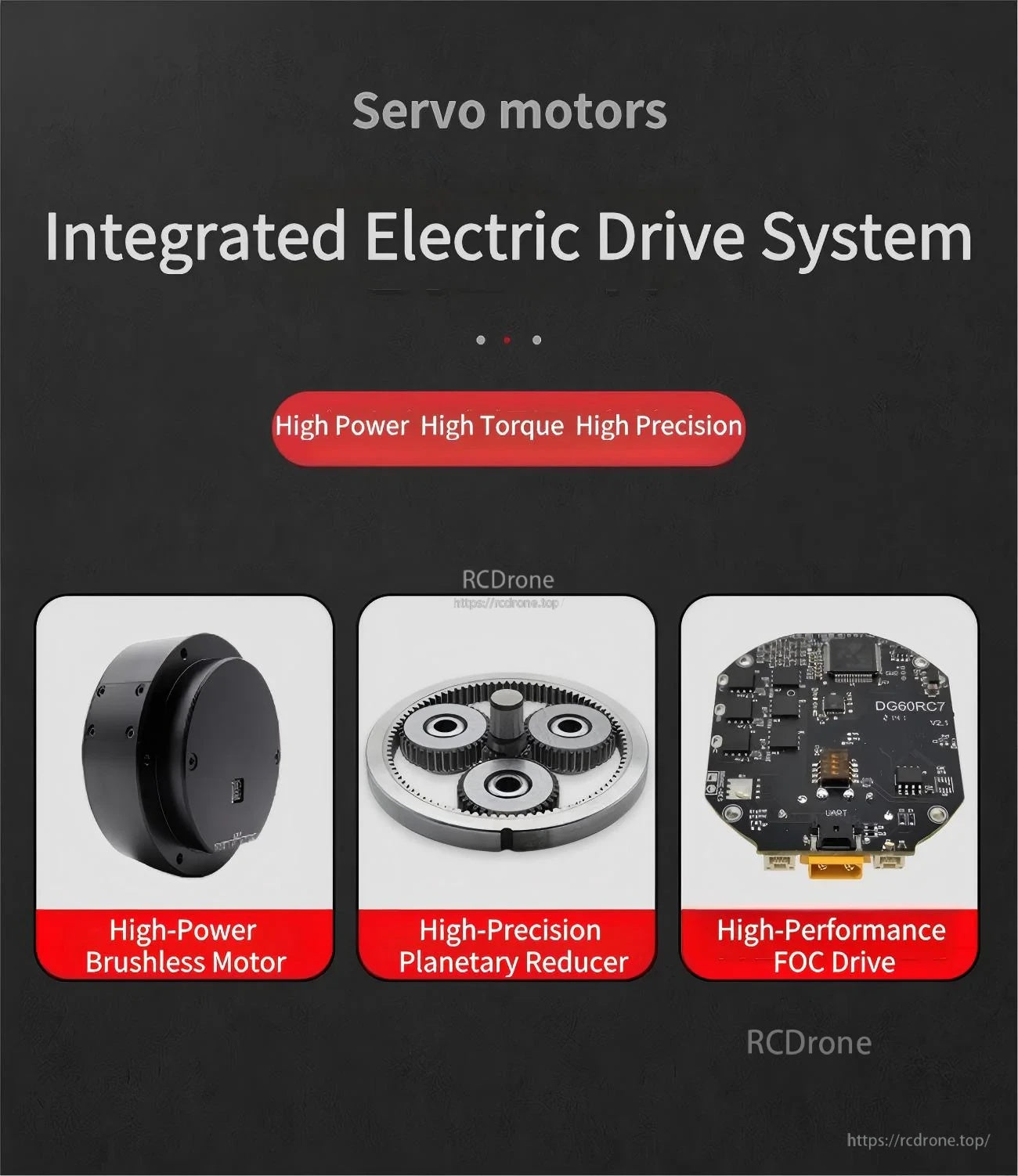
El motor sin escobillas, la caja de engranajes planetaria y la electrónica de control FOC están integrados en una unidad de accionamiento para simplificar el diseño de las articulaciones del robot.

Related Collections

