

Motor de accionamiento eléctrico integrado MUWEIDU ZH5030 16V RS485/CAN codificador de 19 bits para robótica
Motor de accionamiento eléctrico integrado MUWEIDU ZH5030 16V RS485/CAN codificador de 19 bits para robótica
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Resumen
MUWEIDU ZH5030 es un sistema de motor de accionamiento eléctrico integrado diseñado para el control de posición de baja velocidad y alta precisión. Soporta modos de control de torque/velocidad/posición y proporciona comunicación RS485 o CAN para la integración de robótica y automatización.
Características Clave
- MCU de alto rendimiento de 32 bits: la serie MS es completamente compatible con todos los comandos de control de la serie MF.
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión.
- Hojas de acero silicio de primera calidad y imanes permanentes de alto rendimiento resistentes a altas temperaturas utilizados como materiales centrales del motor.
- Diseño de rotor exterior aplanado en múltiples etapas que ofrece un mayor torque para aplicaciones con limitaciones de espacio.
- Estructura sin escobillas combinada con rodamientos de alto rendimiento para una rotación más suave y una vida útil más larga.
- Resistencias de aleación de alta precisión y bajo desplazamiento térmico para un muestreo y control de corriente precisos.
- Controlador de puente completo de tres fases N-channel con baja resistencia interna y alta salida de corriente.
- Soporta conmutación sin interrupciones entre los modos de control de par en bucle abierto, velocidad y posición.
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible; compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi.
Especificaciones Técnicas
| Modelo | ZH5030 |
| Tensión Nominal | 16V |
| Corriente Nominal | 1.35A |
| Poder Pico | 12W |
| Par Nominal | 0.24 N.m |
| Par Pico | 0.53 N.m |
| Velocidad Calificada | 440 rpm |
| Encoder | 19 bits |
| Inercia del Rotor | 202 gcm^2 |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Par / Velocidad / Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Diámetro 49 mm x 28.9 mm |
| Peso | 145 g |
Definición de interfaz
- Interruptor de ID: ID SWITCH
- Conector de comunicación: CAN/RS485
| Interfaz | Nota |
|---|---|
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Escenarios de aplicación
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara 360°
- Cámara de mano
- LiDAR
- Gimbal de pod
Para orientación de integración y soporte de pedidos, contacta [email protected] or visita https://rcdrone.top/ .
Manuales / Documentos
Detalles

Diseñado para movimiento de baja velocidad y alta precisión, el ZH5030 combina un motor sin escobillas y electrónica de control en una unidad compacta.

El etiquetado claro de los pines y un interruptor de ID a bordo ayudan a optimizar el cableado RS485 o CAN de múltiples nodos durante la integración.
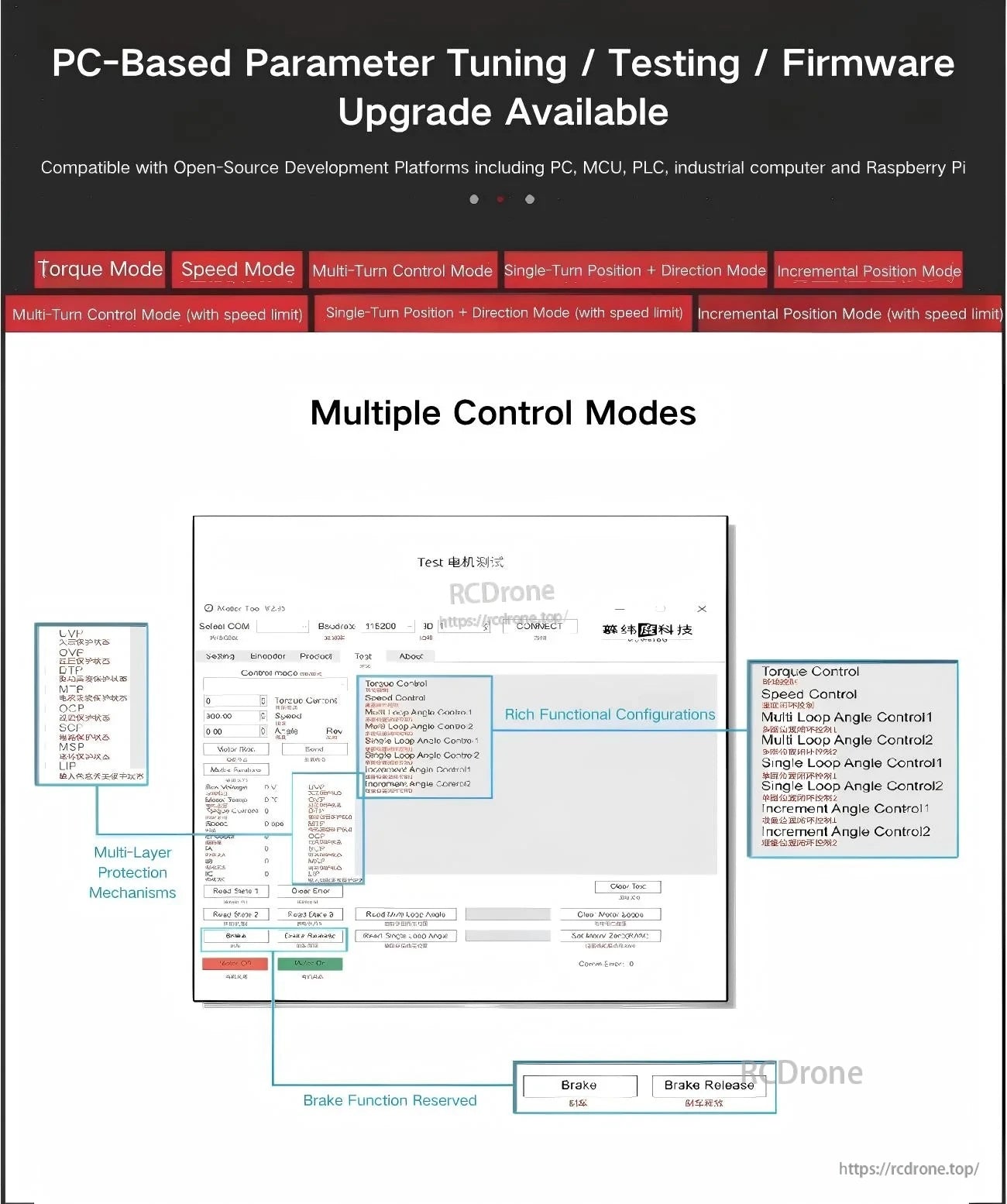
Las herramientas basadas en PC soportan la sintonización de parámetros, pruebas y actualizaciones de firmware, con modos de control de par, velocidad y posición seleccionables.

Related Collections

