







Motor de articulación robótica MyActuator RH-17 Hollow Harmonic – Par máximo 54N·m, relación de engranajes 100:1, EtherCAT y CAN BUS, codificador dual ABS-17BIT
Motor de articulación robótica MyActuator RH-17 Hollow Harmonic – Par máximo 54N·m, relación de engranajes 100:1, EtherCAT y CAN BUS, codificador dual ABS-17BIT
MyActuator
No se pudo cargar la disponibilidad de retiro
Overview
El Motor de Junta Robótica Hueca Harmónica MyActuator RH-17 es un actuador de alto rendimiento diseñado para aplicaciones robóticas avanzadas. Con una relación de engranaje de 100:1, 54 N·m de par máximo y 35 N·m de par nominal, garantiza un funcionamiento preciso, estable y potente. Con comunicación EtherCAT y CAN BUS, un sistema de encoder dual ABS-17BIT y rodamientos de rodillos cruzados, este motor proporciona una excepcional precisión de control y durabilidad. Su diseño hueco compacto (Ø80 mm × 90.2 mm) y peso de 1.11 kg lo hacen ideal para brazos robóticos, robots colaborativos y sistemas de automatización que requieren alta densidad de par y control de movimiento preciso.
Características Clave
-
Alto Par y Potencia: Par nominal de 35 N·m y par máximo de 54 N·m para aplicaciones exigentes.
-
Comunicación Dual: Soporta protocolos EtherCAT y CAN BUS para una integración sin problemas y una respuesta rápida.
-
Control de Precisión: Duales encoders ABS-17BIT para entrada y salida que ofrecen un posicionamiento preciso con <0.01° de repetibilidad.
-
Compacto y Ligero: Diseño de eje hueco con solo 1.11 kg de peso, optimizado para alta densidad de torque.
-
Construcción Robusta: Equipado con rodamientos de rodillos cruzados para una mayor capacidad de carga y durabilidad.
-
Fiabilidad de Grado Industrial: Grado de aislamiento F, MCU de alta velocidad y disipación de calor optimizada para un rendimiento estable a largo plazo.
Parámetros del Producto
| Parámetro | Valor |
|---|---|
| Relación de Transmisión | 100:1 |
| Tensión de Entrada | 48 V |
| Velocidad Sin Carga | 30 RPM |
| Corriente Sin Carga | 0.6 A |
| Velocidad Nominal | 25 RPM |
| Par Nominal | 35 N·m |
| Potencia Nominal | 91 W |
| Corriente Nominal | 4.7 A (rms) |
| Par Máximo | 54 N·m |
| Corriente Máxima | 7.4 A (rms) |
| Constante de Back-EMF | 19.2 Vdc/Krpm |
| Constante de Torque del Módulo | 7.4 N·m/A |
| Resistencia de Fase del Motor | 0.70 Ω |
| Inductancia de Fase del Motor | 0.47 mH |
| Pares de Polos | 10 |
| Juego | <40 Arcsec |
| Carga Radial | Estática: 16.3 kN / Dinámica: 10.4 kN |
| Carga Axial | Estática: 78.2 kN / Dinámica: 20.8 kN |
| Inercia | N: 0.52 kg·m² / B: 0.56 kg·m² |
| Precisión de Repetición de Posición | <0.01° |
| Comunicación | CAN BUS & EtherCAT |
| Peso | Neto: 1.11 kg / En caja: 1.28 kg |
| Grado de Aislamiento | F |
Tipo de Encoder
-
Encoder de Entrada: ABS-17BIT
-
Encoder de Salida: ABS-17BIT
-
Proporciona retroalimentación de movimiento precisa para una mayor precisión de control.
Instalación & Dimensiones
-
Tamaño: Ø80 mm × 90.2 mm
-
Montaje: Múltiples orificios pasantes e interfaces roscadas para una instalación segura.
-
Eje Hueco: Optimizado para el enrutamiento de cables en brazos robóticos y sistemas de automatización.
Interfaz y Cableado
-
Puertos EtherCAT: terminales IN y OUT para encadenamiento de red.
-
Puertos CAN BUS: CAN_H y CAN_L para comunicación.
-
Terminales de Alimentación: conectores XT30 para una entrega de energía confiable.
-
Conexiones Auxiliares: interfaces de batería de memoria y resistor de descarga para configuraciones de control avanzadas.
Contenido del Paquete
-
Actuador: MyActuator Motor de Junta Armónica Hueca RH-17 ×1
-
A. Cable de Alimentación ×2
-
B. Cable de Comunicación CAN BUS ×4
-
C. 120Ω Resistencia de Terminal ×1
-
C. Cable de Comunicación EtherCAT ×2
-
E. Módulo de Comunicación CAN BUS ×1 (Adaptador USB-CAN gratuito incluido por pedido)
Aplicaciones
-
Brazos robóticos colaborativos
-
Sistemas de automatización industrial
-
Robots humanoides y cuadrúpedos
-
Plataformas de movimiento de precisión
-
Juntas robóticas autónomas para investigación y desarrollo
Detalles

El motor de robot RH-17 ofrece doble encoder, CAN BUS & EtherCAT, relación de engranaje 100:1, 48V, 35 N.m de par, 91W de potencia. Disponible con/sin freno. Incluye dibujos y parámetros.
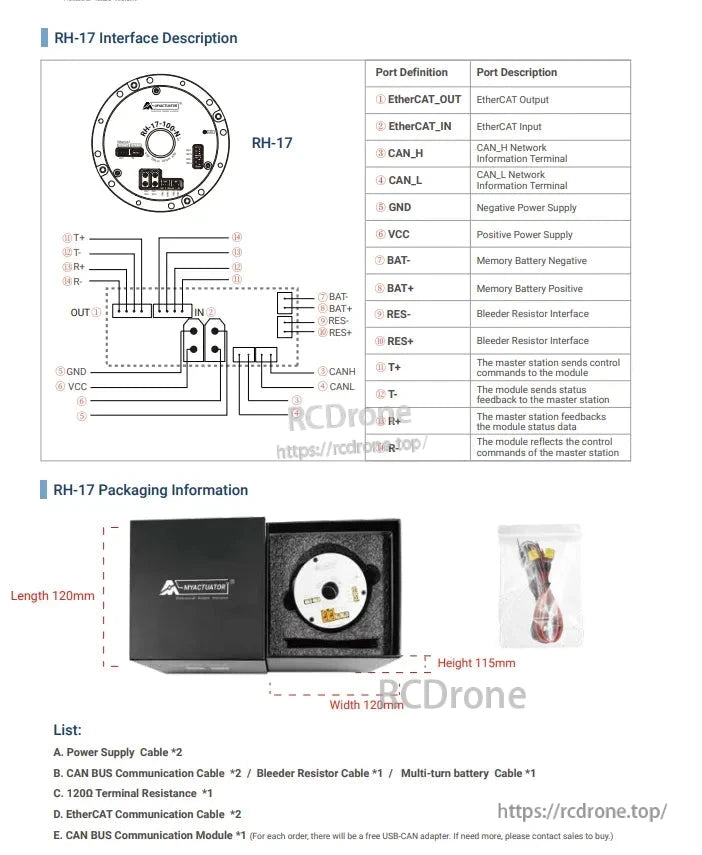
La interfaz RH-17 incluye conexiones EtherCAT, CAN bus, de alimentación y de batería. El embalaje contiene cables, resistencias y un módulo. Dimensiones: 120×120×115mm. La lista incluye cables de alimentación, CAN, EtherCAT, resistencia y módulo de comunicación.
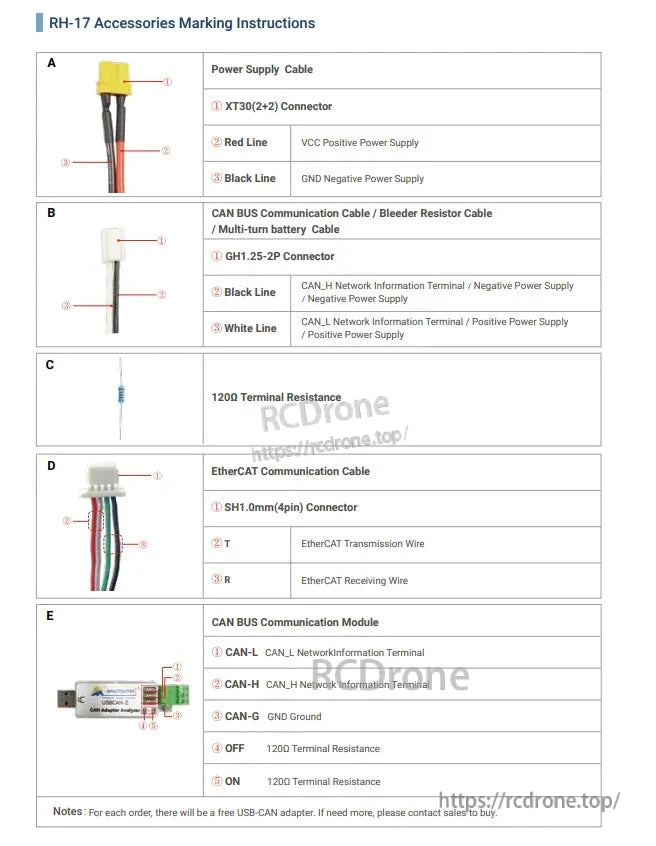
Los accesorios RH-17 incluyen cables de alimentación, CAN BUS, EtherCAT, resistencia de 120Ω y módulo de comunicación. Los detalles cubren conectores, colores de los cables, funciones y resistencias terminales para cada componente. Adaptador USB-CAN incluido con el pedido.
Related Collections







