





Motor de articulación robótica MyActuator RH-20, relación de engranajes 100:1, par máximo 80N·m, EtherCAT y CAN Bus, codificador dual de 17 bits
Motor de articulación robótica MyActuator RH-20, relación de engranajes 100:1, par máximo 80N·m, EtherCAT y CAN Bus, codificador dual de 17 bits
MyActuator
No se pudo cargar la disponibilidad de retiro
Resumen
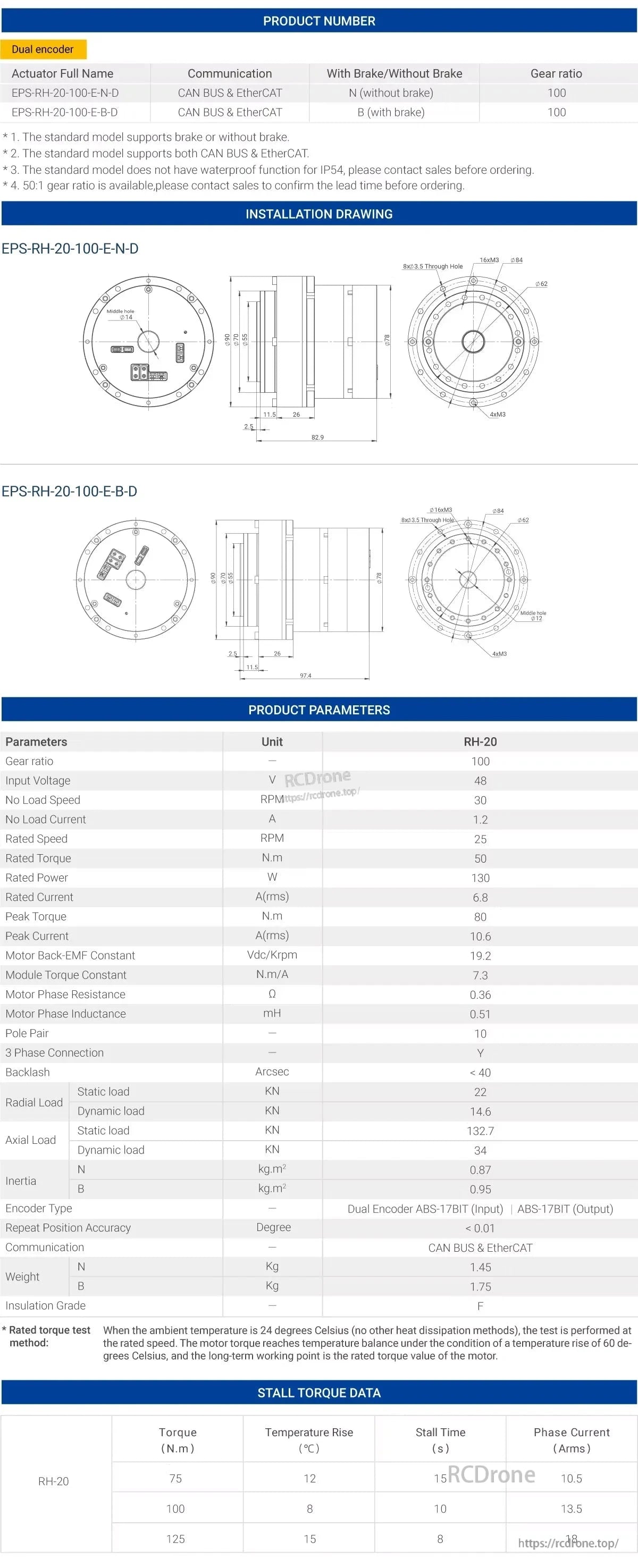
El Motor de Junta Robótica Harmónica MyActuator RH-20 es un actuador de alta rendimiento diseñado para juntas robóticas, automatización industrial y sistemas de movimiento de precisión. Con una relación de transmisión de 100:1, torque máximo de 80N·m, torque nominal de 50N·m, y potencia nominal de 130W, este actuador ofrece un rendimiento potente, estable y eficiente en un formato compacto.
Equipado con protocolos de comunicación EtherCAT y CAN Bus y encoders absolutos duales de 17 bits, el RH-20 garantiza una excepcional precisión de repetición en la posición (<0.01°), lo que lo hace ideal para robots humanoides, brazos robóticos colaborativos, robots móviles y otras aplicaciones de precisión.
Características Clave
-
Alta Salida de Potencia – torque nominal de 50N·m, torque máximo de 80N·m y potencia nominal de 130W para aplicaciones de alta demanda.
-
Control de Precisión – Los codificadores ABS duales de 17 bits ofrecen una precisión de posicionamiento repetido de menos de 0.01°.
-
Comunicación Avanzada – Soporta EtherCAT y CAN Bus para un control en tiempo real rápido y confiable.
-
Protección Confiable – El aislamiento de clase F garantiza un funcionamiento seguro y estable durante el uso continuo a alta carga.
-
Diseño Compacto – Diámetro de 90 mm, altura de 97.4 mm y solo 1.75 kg de peso para una integración sin problemas en sistemas multi-ejes.
-
Rodamientos Duraderos – Rodamientos de rodillos cruzados para alta capacidad de carga radial y axial y larga vida útil.
Especificaciones Técnicas
Rendimiento del Motor
| Parámetro | Unidad | Valor |
|---|---|---|
| Relación de Transmisión | – | 100 |
| Tensión de Entrada | V | 48 |
| Velocidad sin Carga | RPM | 30 |
| Corriente sin Carga | A | 1.2 |
| Velocidad Nominal | RPM | 25 |
| Par Nominal | N·m | 50 |
| Potencia Nominal | W | 130 |
| Corriente Nominal | A (rms) | 6.8 |
| Par Máximo | N·m | 80 |
| Corriente Máxima | A (rms) | 10.6 |
| Constante de Back-EMF del Motor | Vdc/Krpm | 19.2 |
| Constante de Torque del Módulo | N·m/A | 7.3 |
| Resistencia de Fase del Motor | Ω | 0.36 |
| Inductancia de Fase del Motor | mH | 0.51 |
| Pares de Polos | – | 10 |
| Conexión Trifásica | – | Y |
| Juego | Arcsec | <40 |
Carga & Inercia
| Parámetro | Unidad | Valor |
|---|---|---|
| Carga Radial (Estática/Dinámica) | KN | 22 / 14.6 |
| Carga Axial (Estática/Dinámica) | KN | 132.7 / 34 |
| Inercia (N/B) | kg·m² | 0.87 / 0.95 |
| Peso (N/B) | Kg | 1.45 / 1.75 |
| Tipo de Encoder | – | Dual ABS-17BIT (Entrada) / ABS-17BIT (Salida) |
| Precisión de Repetición de Posición | Grado | <0.01 |
| Comunicación | – | EtherCAT & CAN Bus |
| Grado de Aislamiento | – | F |
Datos de Par de Estancamiento
| Par (N·m) | Aumento de Temperatura (°C) | Tiempo de Estancamiento (s) | Corriente de Fase (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Interfaz y Pinout
-
EtherCAT_IN / EtherCAT_OUT – Puertos de comunicación de alta velocidad
-
CAN_H / CAN_L – Terminales de red CAN Bus
-
VCC / GND – Suministro de energía positivo y negativo
-
RES+ / RES- – Interfaz de resistor de descarga
-
BAT+ / BAT- – Conexión de batería de memoria multivuelta
-
T+, T-, R+, R- – Comunicación maestro-esclavo y retroalimentación de estado
Contenido del Paquete
-
Cable de Alimentación ×2
-
Cable de Comunicación CAN Bus ×4
Cable de Resistor Bleeder ×1
-
Cable de Batería Multi-vuelta ×1
-
Resistencia Terminal de 120Ω ×1
-
Cable de Comunicación EtherCAT ×2
-
Módulo de Comunicación CAN Bus ×1 (Adaptador USB-CAN)
Aplicaciones
-
Juntas de robots humanoides
-
Brazos robóticos colaborativos
-
Robots móviles y sistemas de conducción AGV
-
Plataformas de posicionamiento de precisión
-
Equipos de inspección automatizados y de laboratorio
Detalles
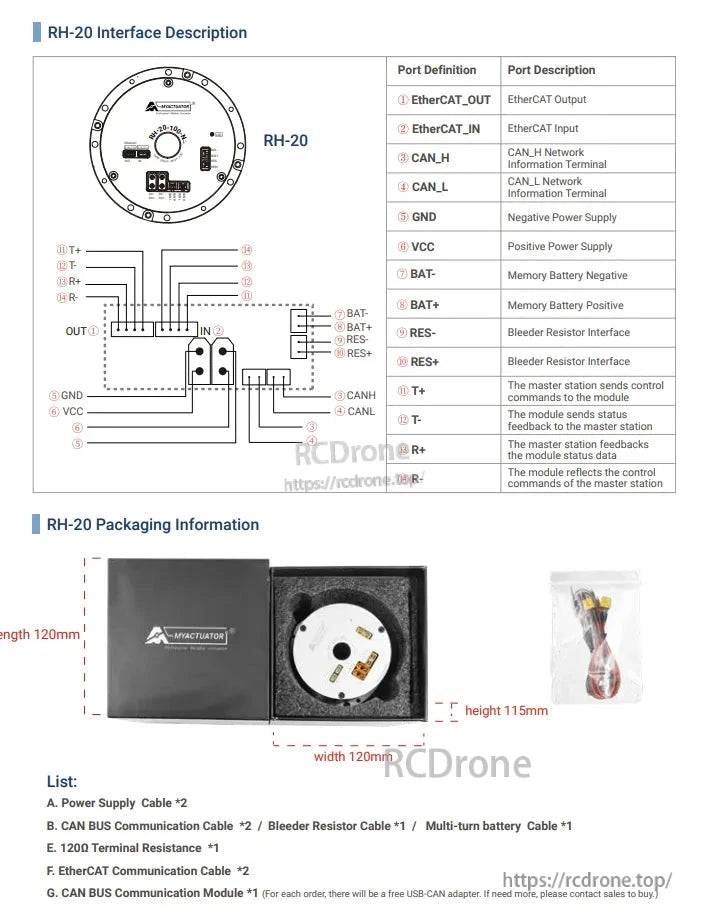
La interfaz del motor armónico tiene conexiones EtherCAT, CAN bus, de alimentación y de batería. Embalaje: 120x120x115mm. Incluye cables, resistencias, módulos de comunicación para la configuración.
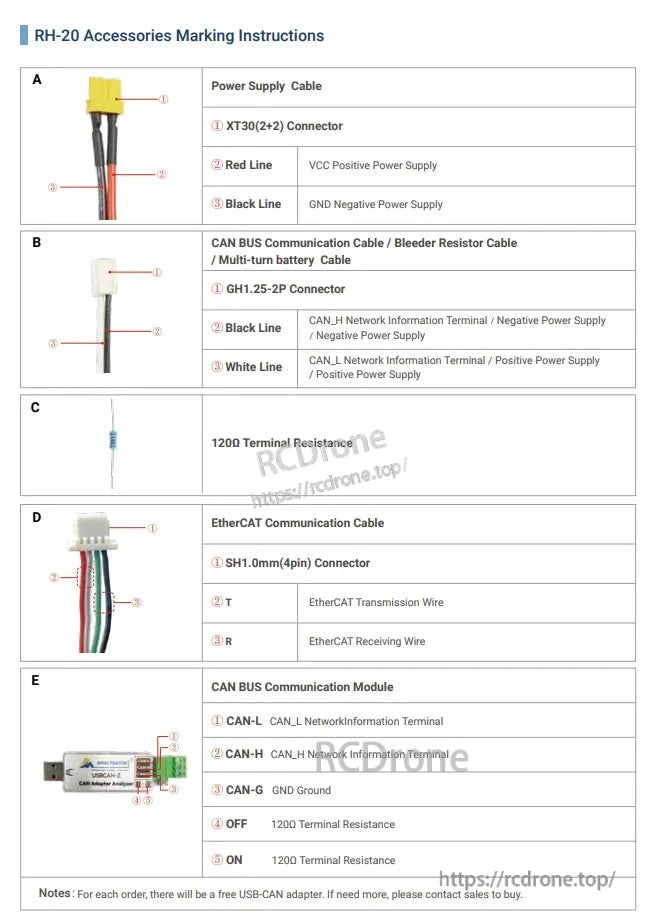
Los accesorios RH-20 incluyen instrucciones de marcado para cables de alimentación, CAN BUS, EtherCAT y módulo de comunicación. Los detalles cubren tipos de conectores, colores de cables, funciones y resistencia de terminales. Cada pedido incluye un adaptador USB-CAN gratuito.
Related Collections





