






Módulo de articulación robótica armónica hueca MyActuator RH-32, 48V, 229Nm par máximo, codificadores duales de 17 bits, CAN BUS & Control EtherCAT
Módulo de articulación robótica armónica hueca MyActuator RH-32, 48V, 229Nm par máximo, codificadores duales de 17 bits, CAN BUS & Control EtherCAT
MyActuator
No se pudo cargar la disponibilidad de retiro
Resumen
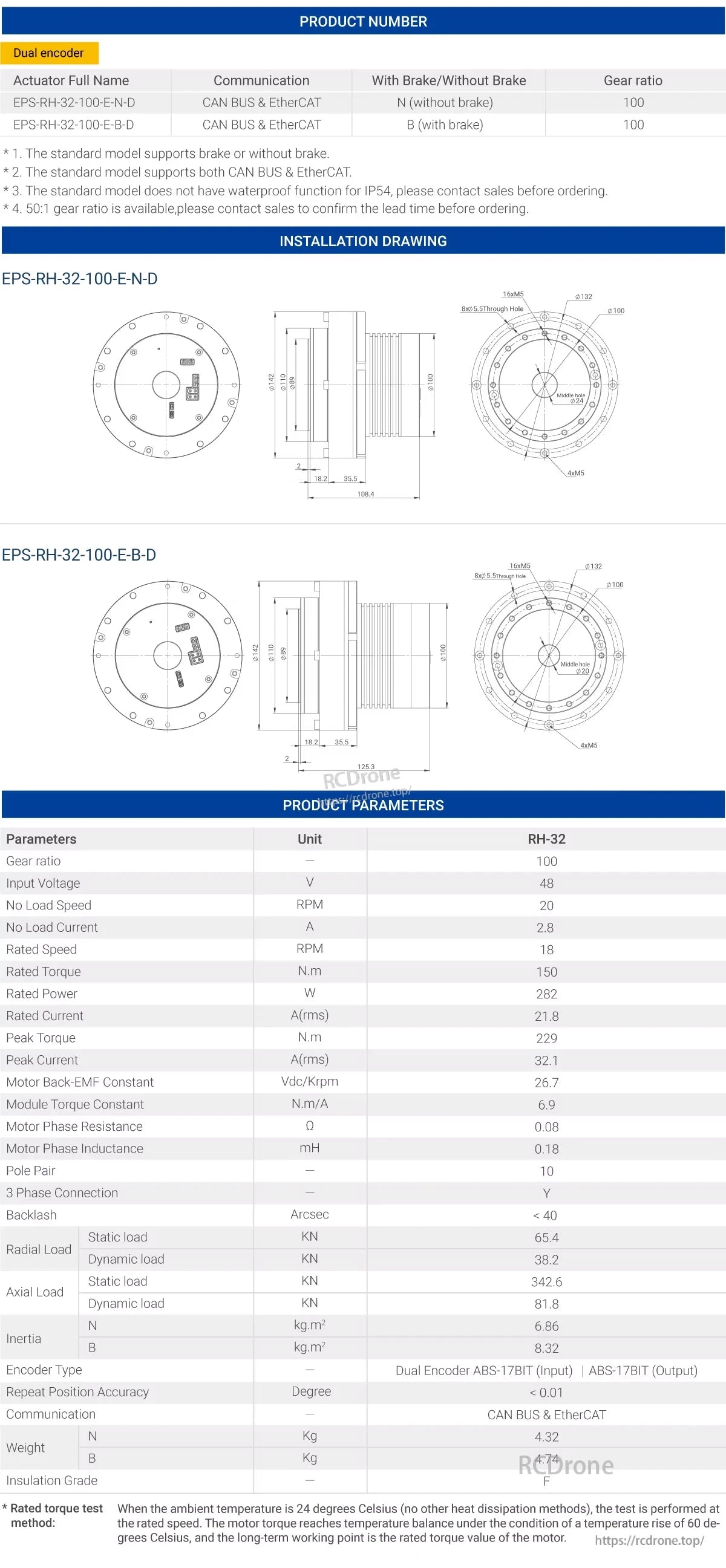
El Módulo de Junta Robótica Armónica Hueca MyActuator RH-32 es un actuador de alto par y alta precisión diseñado para brazos robóticos, robots humanoides y sistemas de automatización colaborativa. Con una relación de transmisión de 100:1, voltaje de entrada de 48V, y 229 N·m de par máximo, el RH-32 garantiza un rendimiento excepcional para aplicaciones que requieren movimiento suave, control preciso y alta capacidad de carga. Con soporte para encoders duales (entrada/salida de 17 bits), comunicación CAN BUS &y EtherCAT, y un diseño de eje hueco, se integra sin problemas en sistemas robóticos avanzados.
Características Clave
-
Rendimiento de Alto Par – Ofrece hasta 150 N·m de par nominal y 229 N·m de par máximo, ideal para juntas robóticas de alta resistencia.
-
Control de Precisión – Los codificadores duales de 17 bits garantizan una retroalimentación precisa y repetibilidad de <0.01°.
-
Comunicación Versátil – Soporta CAN BUS y EtherCAT para una integración de sistema confiable y flexible.
-
Capacidad de Carga Robusta – Maneja hasta 342.6 kN de carga estática axial y 81.6 kN de carga dinámica axial.
-
Diseño Hueco Compacto – Facilita el enrutamiento de cables a través de la articulación para una configuración robótica más limpia y segura.
-
Alta Fiabilidad – Clasificación de grado de aislamiento F y diseño avanzado de disipación de calor para durabilidad industrial.
Especificaciones Técnicas
| Parámetro | Unidad | Valor |
|---|---|---|
| Relación de Transmisión | — | 100 |
| Tensión de Entrada | V | 48 |
| Velocidad Sin Carga | RPM | 20 |
| Corriente Sin Carga | A | 2.8 |
| Velocidad Nominal | RPM | 18 |
| Par Nominal | N·m | 150 |
| Potencia Nominal | W | 282 |
| Corriente Nominal | A(rms) | 21.8 |
| Par de pico | N·m | 229 |
| Corriente de pico | A(rms) | 32.1 |
| Constante de Back-EMF del motor | Vdc/Krpm | 26.7 |
| Constante de par del módulo | N·m/A | 6.9 |
| Resistencia de fase del motor | Ω | 0.08 |
| Inductancia de fase del motor | mH | 0.18 |
| Pares de polos | — | 10 |
| Conexión de 3 fases | — | Y |
| Juego | Arcsec | < 40 |
| Carga radial (Estática/Dinámica) | kN | 65.4 / 38.2 |
| Carga axial (Estática/Dinámica) | kN | 342.6 / 81.6 |
| Inercia (N/B) | kg·m² | 6.86 / 8.32 |
| Tipo de Encoder | — | Encoder Dual ABS-17BIT (Entrada/Salida) |
| Precisión de Repetición de Posición | Grado | < 0.01 |
| Comunicación | — | CAN BUS &y EtherCAT |
| Peso (N/B) | Kg | 4.32 / 4.74 |
| Grado de Aislamiento | — | F |
Descripción de la Interfaz
El RH-32 soporta comunicación EtherCAT y CAN, proporcionando control en tiempo real confiable.
-
EtherCAT: Comunicación determinista de alta velocidad para automatización industrial.
-
CAN BUS: Comunicación flexible y estable para sistemas complejos de múltiples articulaciones.
-
Conectores dedicados para señales de potencia, retroalimentación y control garantizan una integración segura y eficiente.
Información del embalaje
-
Dimensiones de la caja: 165mm × 165mm × 127mm
-
Accesorios incluidos:
-
Cable de alimentación × 2
-
Cable de comunicación CAN BUS × 2
-
Cable de resistor de descarga × 1
-
Cable de batería de múltiples vueltas × 1
-
Resistencia de terminal de 120Ω × 1
-
Cable de comunicación EtherCAT × 2
-
Módulo de comunicación CAN BUS × 1 (con adaptador USB-CAN gratuito)
- MyActuator Módulo de articulación de robot RH-32-100 x 1
-
Aplicaciones
-
Robots colaborativos (cobots)
-
Robots humanoides y de servicio
Manipuladores industriales
-
Vehículos guiados automatizados (AGVs)
-
Sistemas de posicionamiento de precisión
Detalles
La articulación del robot RH-32 ofrece doble encoder, CAN BUS/EtherCAT, relación de engranaje 100:1, 48V, 150 N.m de par, 21.8 A corriente. Freno opcional, IP54 disponible.
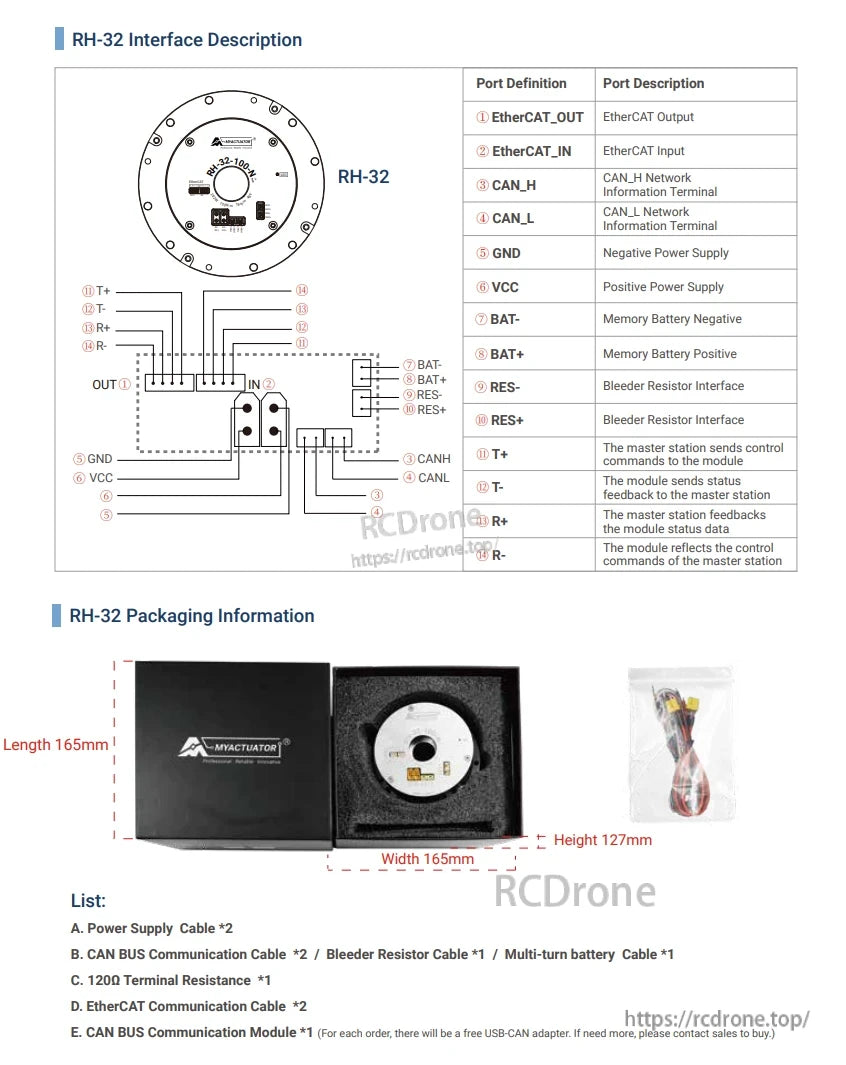
La articulación del robot RH-32 cuenta con interfaces EtherCAT y CAN, definiciones de puertos, dimensiones 165x165x127mm. Incluye cables, resistencia terminal, módulo CAN.
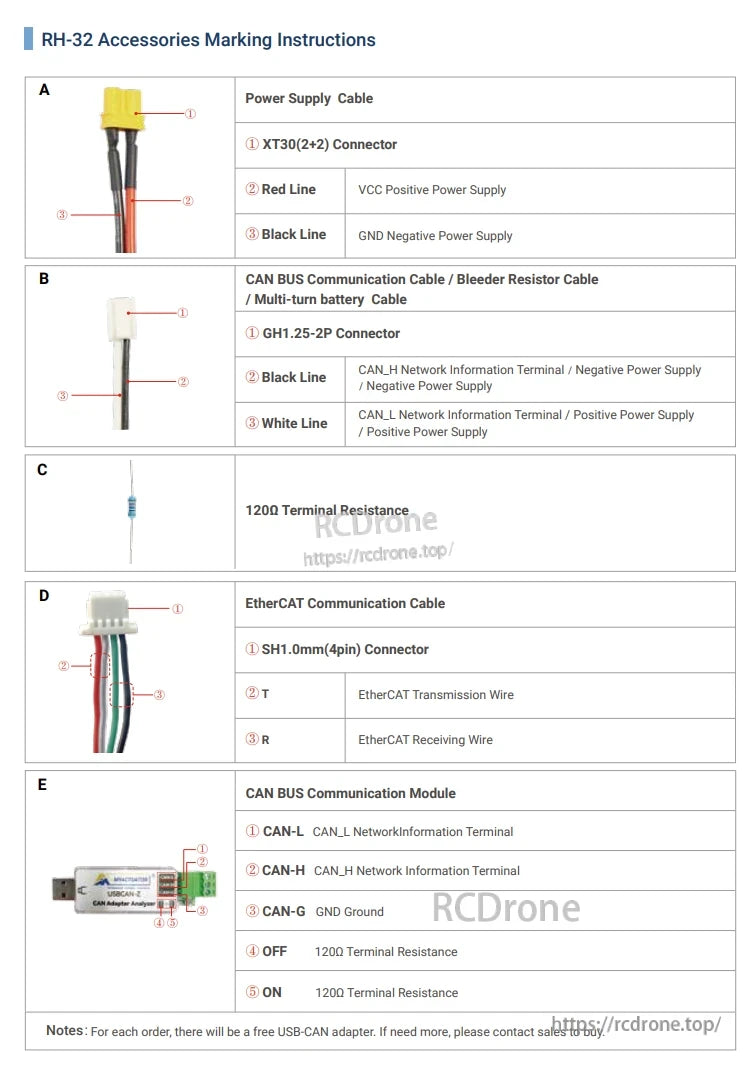
Los accesorios del RH-32 incluyen cables de alimentación, CAN BUS, EtherCAT, resistor de 120Ω y módulo CAN. Los detalles cubren conectores, funciones de los cables y resistencias terminales para una instalación y comunicación adecuadas. Adaptador USB-CAN gratuito incluido con cada pedido.
Related Collections






