




Actuador servo MyActuator RMD-X12-320, motor integrado de alto par con EtherCAT y CAN BUS, adaptador USB-CAN, resistor de 120Ω
Actuador servo MyActuator RMD-X12-320, motor integrado de alto par con EtherCAT y CAN BUS, adaptador USB-CAN, resistor de 120Ω
MyActuator
No se pudo cargar la disponibilidad de retiro
Descripción
El MyActuator RMD-X12-320 es un actuador servo de alto rendimiento diseñado para robots industriales, robots colaborativos y sistemas de automatización de alta precisión. Integra un motor de alto par, una caja de cambios planetaria y electrónica de control avanzada en un formato compacto, lo que permite un control de movimiento sin interrupciones y una comunicación confiable a través de EtherCAT o CAN BUS.
Con su diseño optimizado y ricas opciones de interfaz, el RMD-X12-320 proporciona una eficiencia excepcional, control preciso y flexibilidad para aplicaciones robóticas exigentes.
Características clave
-
Diseño integrado: Motor, controlador y reductor integrados en un solo módulo compacto.
-
Salida de alto par: Ideal para juntas robóticas de servicio pesado y sistemas de automatización.
-
Múltiples protocolos de comunicación: Soporta tanto EtherCAT como CAN BUS.
-
Retroalimentación precisa: Encoders de alta resolución para un movimiento y posicionamiento suaves.
-
Conexión plug-and-play: Cables claramente etiquetados y adaptadores incluidos para una configuración rápida.
-
Amplia compatibilidad: Adecuado para robots industriales, robots colaborativos, AGVs y brazos de automatización.
Descripción de la interfaz
| Puerto | Definición | Descripción |
|---|---|---|
| 1. EtherCAT_OUT | Salida EtherCAT | Salida de comunicación a otros módulos. |
| 2. EtherCAT_IN | Entrada EtherCAT | Entrada de comunicación del controlador maestro. |
| 3. VCC | Fuente de alimentación positiva | Entrada principal de CC positiva. |
| 4. CAN_L | CAN bus bajo | Señal baja CAN para comunicación CAN. |
| 5. CAN_H | CAN bus alto | Señal alta CAN para comunicación CAN. |
| 6. GND | Tierra | Terminal de potencia negativa. |
| 7. T- / 8. T+ | Líneas de retroalimentación | Retroalimentación del estado del módulo a la estación maestra. |
| 9. R- / 10. R+ | Líneas de comando | Señales de control enviadas desde la estación maestra al actuador. |
Accesorios incluidos
| Etiqueta | Artículo | Descripción |
|---|---|---|
| A | Fuente de alimentación + Cable CAN BUS ×2 | Incluye conector de alimentación XT90 con líneas blanca (CAN_L), amarilla (CAN_H), roja (VCC) y negra (GND). |
| B | Resistor terminal de 120Ω ×1 | Para la terminación del CAN BUS. |
| C | Cable de comunicación EtherCAT ×2 | Conectores SH1.0mm de 4 pines para la transmisión y recepción de señales EtherCAT. |
| D | Módulo de comunicación CAN BUS ×1 | Adaptador USB a CAN para diagnósticos e integración. Incluye terminación de 120Ω conmutables. |
Información de embalaje
-
Dimensiones de la caja: 280 mm (Longitud) × 230 mm (Ancho) × 130 mm (Altura)
-
Contenido:
-
X12-320 Actuador Servo ×1
-
Fuente de alimentación + Cable de comunicación CAN BUS ×2
-
Resistencia terminal de 120Ω ×1
-
Cable de comunicación EtherCAT ×2
-
Módulo de comunicación CAN BUS ×1 (adaptador USB-CAN)
-
Aplicaciones
-
Robots industriales y robots colaborativos
-
AGVs (Vehículos Guiados Automáticamente) y AMRs (Robots Móviles Autónomos)
-
Brazos robóticos para automatización y ensamblaje de precisión
Plataformas de investigación y desarrollo que requieren un control de movimiento fiable
Detalles
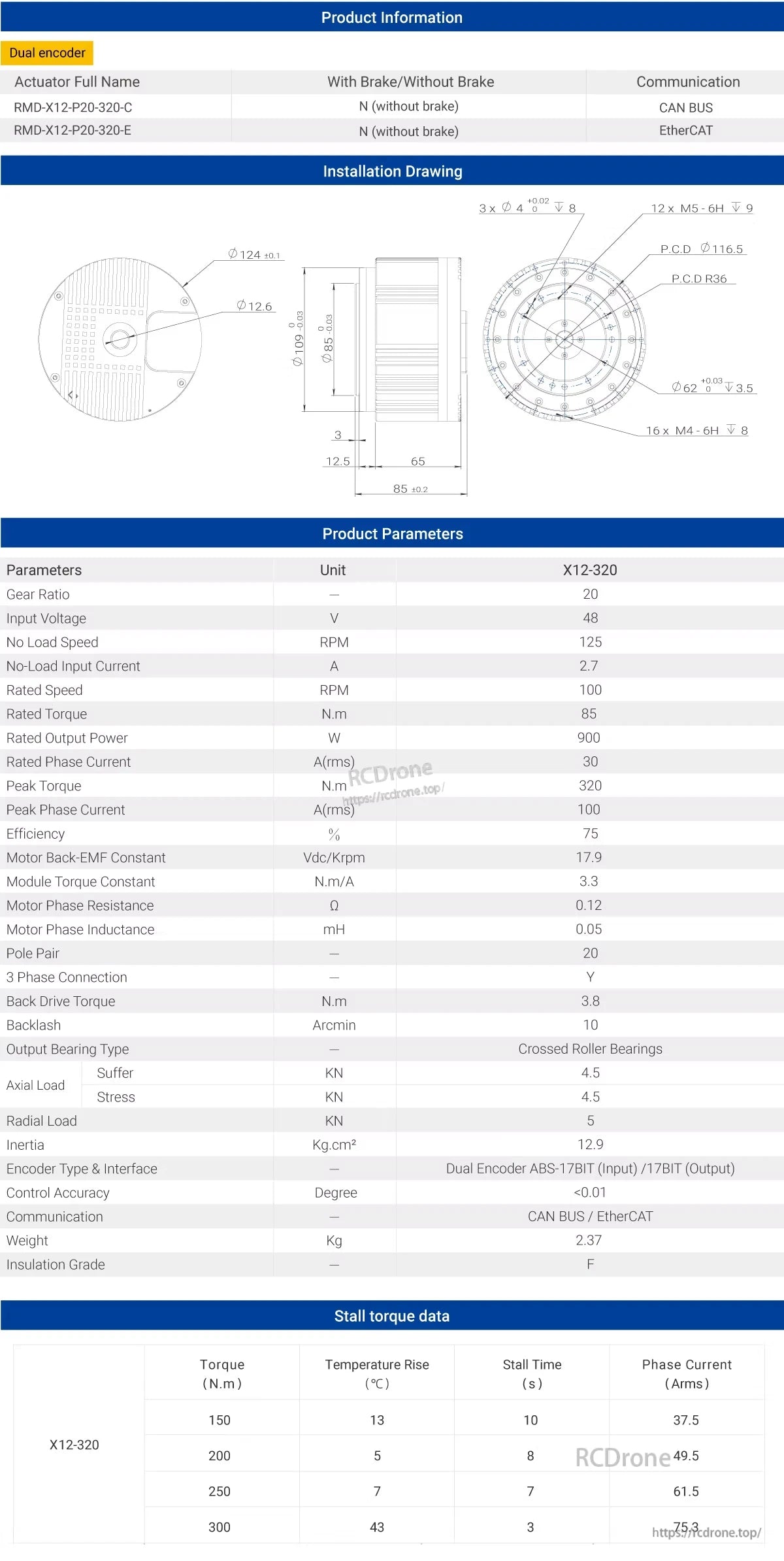
MyActuator actuador servo RMD-X12-P20-320, doble encoder, relación de engranaje de 20, entrada de 48V, potencia de 900W, par nominal de 85Nm, comunicación CAN BUS/EtherCAT, 2.37kg de peso, rodamientos de rodillos cruzados, 12.9kg.cm² de inercia.

La interfaz de servo X12-320 soporta EtherCAT, bus CAN y conexiones de alimentación. Paquete: 280×230×130mm. Incluye fuente de alimentación, cables, resistencias y adaptador USB-CAN gratuito.

Los accesorios del X12-320 incluyen fuente de alimentación, cables CAN BUS, EtherCAT y detalles del módulo. Los cables, conectores y terminales codificados por colores aseguran una instalación adecuada. Adaptador USB-CAN gratuito incluido por pedido.

Servo RMD X12 320: respuesta de 100μs, encoder dual, EtherCAT/CAN, 320N.m de par, Ø124mm×85mm, para robótica y automatización.

RMD-X12-P20-320-C motor servo: entrada de 48V, relación de engranaje de 20:1, potencia máxima de 900W, encoders duales de 17 bits, CAN BUS/EtherCAT, 2.37kg, con dimensiones detalladas.

Motor servo X12-320L con potencia, cables CAN BUS, EtherCAT y resistor terminador de 1200.

Exhibición de empaque del servo MYACTUATOR, incluyendo cables CAN BUS y resistor de 120Ω.
Related Collections




