





Actuador Planetario Robótico MyActuator RMD-X2-7 7N·m 24V 28:1 Doble Encoder CAN EtherCAT Motor Servo
Actuador Planetario Robótico MyActuator RMD-X2-7 7N·m 24V 28:1 Doble Encoder CAN EtherCAT Motor Servo
MyActuator
No se pudo cargar la disponibilidad de retiro
Overview
El MyActuator RMD-X2-7 actuador planetario es un motor de engranaje servo compacto y de alta precisión diseñado para aplicaciones de robótica, automatización y control de movimiento. Con una relación de transmisión de 28.17:1, encoders duales (entrada ABS de 17 bits / salida de 18 bits), y soporte para comunicación tanto CAN BUS como EtherCAT, garantiza una salida de par estable y un posicionamiento preciso. Con un par nominal de 2.5 N·m, un par máximo de 7 N·m, y una velocidad nominal de 142 RPM, este actuador ofrece potencia confiable en un factor de forma ligero de 0.26 kg.
Características Clave
-
Control de Alta Precisión – Sistema de encoder dual (entrada de 17 bits, salida de 18 bits) con <0.01° de precisión de control.
-
Rendimiento Fuerte – Potencia nominal 37 W, corriente nominal 3 A, eficiencia del 63%.
-
Diseño Compacto – Diámetro 44 mm, longitud 63.5 mm, peso solo 0.26 kg.
-
Movimiento Suave – Control orientado al campo (FOC), bajo retroceso (≤12 arcmin), y constante de par de 0.8 N·m/A.
-
Durabilidad – Rodamientos de bolas de ranura profunda, grado de aislamiento F, y robusta carcasa de aluminio.
-
Conectividad Flexible – Compatible con CAN BUS y EtherCAT protocolos.
-
Seguridad y Estabilidad – Corriente de pico 8.1 A, eficiencia nominal, y resistencia al par de bloqueo probada con diferentes corrientes de fase.
Especificaciones
| Parámetro | Valor |
|---|---|
| Relación de Transmisión | 28.17:1 |
| Tensión de entrada | 24 V |
| Velocidad sin carga | 178 RPM |
| Velocidad nominal | 142 RPM |
| Par nominal | 2.5 N·m |
| Par máximo | 7 N·m |
| Potencia nominal | 37 W |
| Corriente de fase nominal | 3 A (rms) |
| Corriente de fase máxima | 8.1 A (rms) |
| Eficiencia | 63% |
| Constante de retroalimentación de EMF del motor | 4.3 Vdc/Krpm |
| Constante de par | 0.8 N·m/A |
| Resistencia del motor | 0.61 Ω |
| Inductancia del motor | 0.13 mH |
| Pares de polos | 13 |
| Par de retroceso | 0.4 N·m |
| Juego | ≤12 arcmin |
| Tipo de rodamiento | Rodamientos de bolas de surco profundo |
| Carga axial | 0.25 KN |
| Carga radial | 1 KN |
| Inercia | 0.17 Kg·cm² |
| Tipo de encoder | Encoder dual ABS-17bit (Entrada)/18bit (Salida) |
| Comunicación | CAN BUS / EtherCAT |
| Peso | 0.26 kg |
| Grado de Aislamiento | F |
Datos de Par de Estancamiento
| Par (N·m) | Aumento de Temperatura (°C) | Tiempo de Estancamiento (s) | Corriente de Fase (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
Accesorios (Incluidos)
-
Fuente de alimentación + Cable de comunicación CAN BUS ×1
-
Resistencia terminal de 120Ω ×1
-
Cable de comunicación EtherCAT ×2
-
Módulo de comunicación CAN BUS (Adaptador USB-CAN) ×1
Aplicaciones
El MyActuator RMD-X2-7 es ideal para brazos robóticos, robots humanoides, exoesqueletos, estabilizadores y sistemas de automatización industrial donde se requiere un control de par preciso, tamaño compacto y comunicación de doble canal.
Detalles

Motor servo sin escobillas X2-7, entrada de codificador dual ABS-17BIT/salida 18BIT, 37W, 2.5N.m, 142rpm, bus CAN, 128, indicador LED.

Actuador planetario RMD X2-7 con codificador dual EtherCAT+CAN BUS. Presenta 28.Relación de engranaje de 17, entrada de 24V, velocidad de 142RPM, par de 2.5N.m y potencia de 37W. Incluye dimensiones de instalación y especificaciones técnicas.

RMD-X2-P28-7 ofrece codificador dual, entrada de 24V, par de 2.5N.m, 142 RPM, CAN BUS/EtherCAT y peso de 0.26kg. Incluye dibujo de instalación y especificaciones detalladas como par de bloqueo y datos eléctricos.

La interfaz X2-7 incluye VCC, GND, CAN_H, CAN_L, EtherCAT IN/OUT y puertos T+/T-, R+/R-. Embalaje: caja de 65x65x55mm con fuente de alimentación, cable CAN, resistor de 120Ω, cable EtherCAT y dos módulos CAN. Adaptador USB-CAN gratuito incluido por pedido.
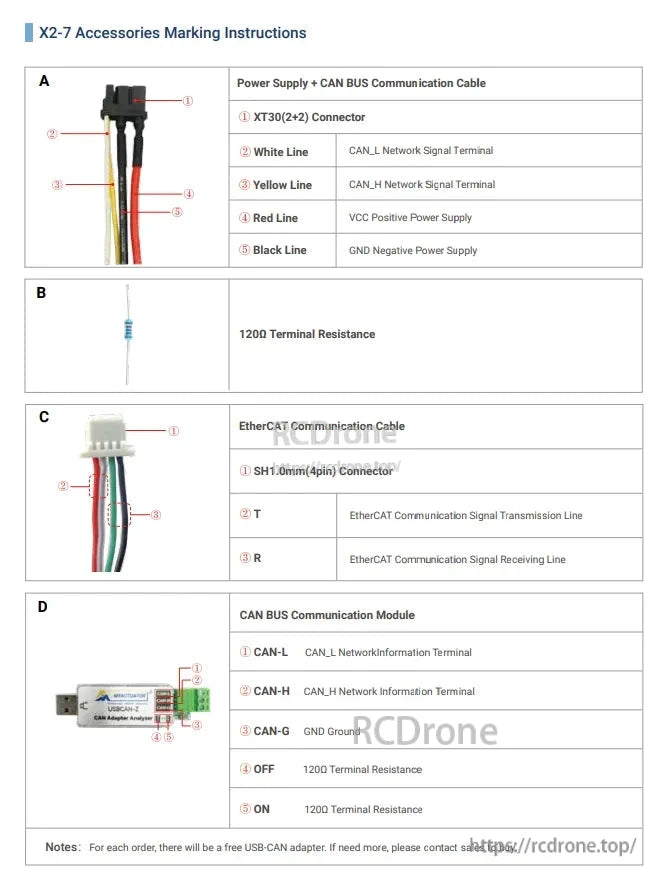
Las instrucciones de marcado detallan la fuente de alimentación, cables CAN BUS, cables EtherCAT, conectores, resistencia terminal. Incluye nota del adaptador USB-CAN para pedidos.

El motor servo MYACTUATOR X2-7 entrega 37W de potencia y 2.5N.m de par, con codificador dual, velocidad de 1.42rpm y relación de engranaje de 1:28.Incluye una fuente de alimentación, un cable de comunicación CAN BUS, resistencia terminal, cables EtherCAT y un módulo CAN. Se incluye un adaptador USB-CAN gratuito. Etiquetados como VCC, GND, CANH, CANL y señal I/O, garantizan una fácil configuración. Certificado CE y RoHS, ofrece un rendimiento profesional, confiable e innovador.
Related Collections





