






Actuador planetario MyActuator RMD-X4-10 10N·m, doble codificador, EtherCAT+CAN, accionamiento de articulación robótica
Actuador planetario MyActuator RMD-X4-10 10N·m, doble codificador, EtherCAT+CAN, accionamiento de articulación robótica
MyActuator
No se pudo cargar la disponibilidad de retiro
Resumen
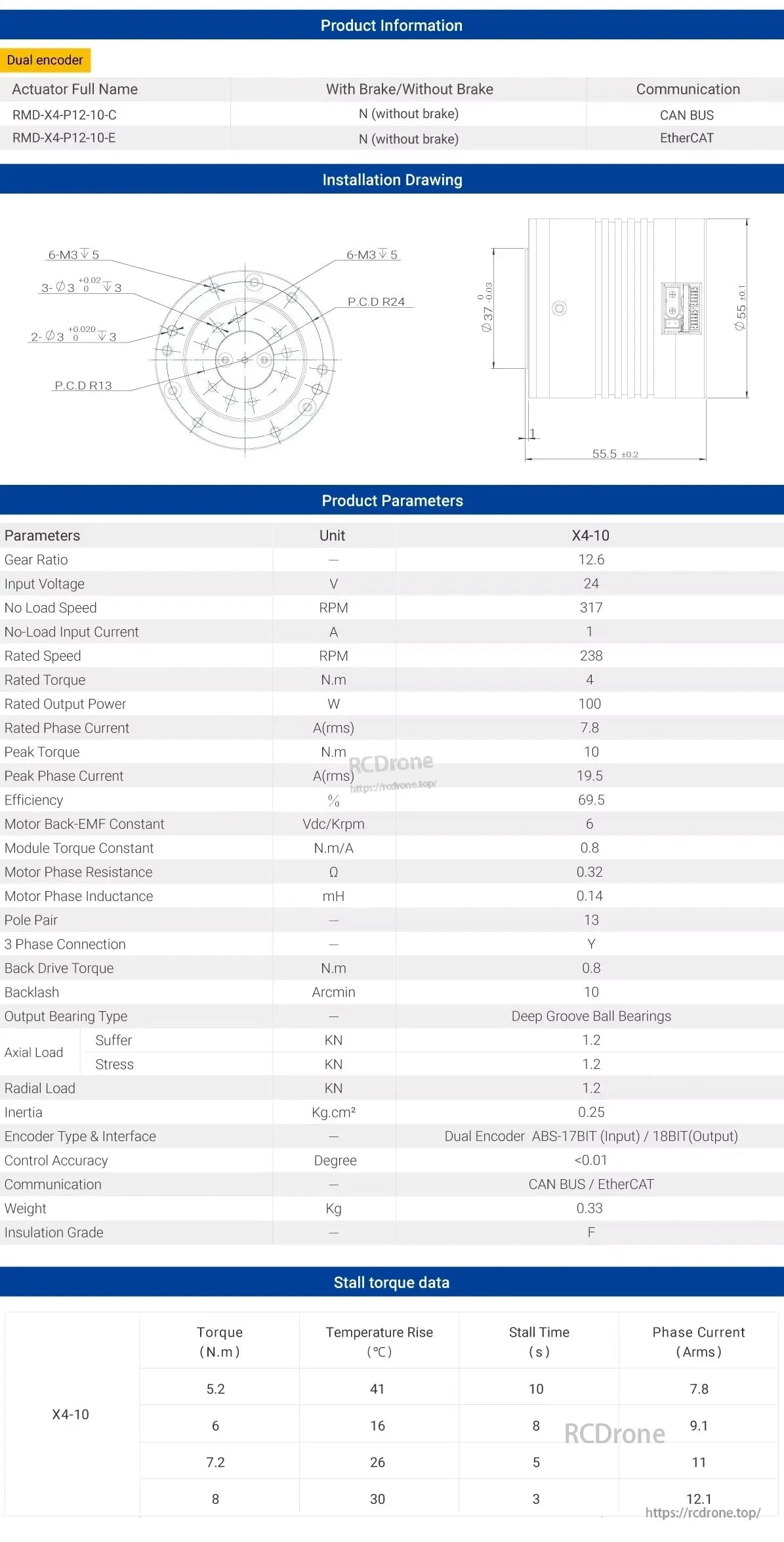
El MyActuator RMD-X4-10 actuador planetario es un módulo de motor de CC de alto rendimiento diseñado para aplicaciones robóticas avanzadas. Con una relación de engranaje planetario de 12.6:1, un par máximo de 10N·m, y una potencia de salida nominal de 100W, integra un sistema de codificadores dual (entrada de 17 bits / salida de 18 bits) que ofrece un control de precisión de 0.01°. Su gran estructura hueca soporta la integración de múltiples sensores, permitiendo un hub central para el control de postura de cuerpo completo en robots humanoides. Con comunicación de doble protocolo EtherCAT y CAN, el actuador logra una respuesta ultra-rápida de 250μs, lo que lo hace ideal para escenarios de alta dinámica y alta fiabilidad, como robots humanoides, sistemas de piernas biónicas y automatización industrial.
Características Clave
-
Codificador Dual de Alta Precisión: entrada de 17 bits / salida de 18 bits con 0.01° precisión
-
Par máximo 10N·m con relación de engranaje planetario de 12.6:1
-
Rodamiento de rodillos cruzados: Capacidad excepcional de momento anti-flexión para juntas robóticas estables
-
Comunicación dual EtherCAT + CAN Bus: Soporta enlace entre múltiples máquinas, respuesta ultra-rápida de 250μs
-
Estructura hueca grande: Permite la integración de sensores, cables y anillos de deslizamiento para sistemas robóticos complejos
-
Alta fiabilidad: Diseñado para el control de marcha humanoide, transiciones suaves para correr, saltar y movimientos complejos
-
Compacto y ligero: Φ55mm × 55.5mm, peso 0.33kg
Especificaciones
| Parámetro | Valor |
|---|---|
| Modelo | RMD-X4-10 |
| Relación de Transmisión | 12.6:1 |
| Tensión de Entrada | 24V DC |
| Velocidad Nominal | 238 RPM |
| Velocidad Sin Carga | 317 RPM |
| Potencia de Salida Nominal | 100W |
| Par Nominal | 4N·m |
| Par Máximo | 10N·m |
| Corriente Nominal | 7.84A |
| Corriente en vacío | 1A |
| Tipo de encoder | Encoder dual (ABS-17bit / 18bit) |
| Comunicación | EtherCAT + CAN Bus |
| Peso | 0.33kg |
| Tamaño | Ø55mm × 55.5mm |
Aplicaciones
-
Robots Humanoides – Accionamientos de articulaciones para brazos, piernas y torso
-
Accionamientos de Pierna Biónica – Alto par con diseño anti-flexión para marchas de carrera y salto
-
Robots Colaborativos – Control de movimiento suave para automatización industrial
-
Exoesqueletos – Actuadores ligeros y de alta dinámica para dispositivos de asistencia humana
-
Líneas de Producción Flexibles – Sincronización multi-eje a través de comunicación de alta velocidad EtherCAT
Embalaje y Accesorios
-
Fuente de Alimentación + Cable de Comunicación CAN Bus ×1
-
Resistencia Terminal de 120Ω ×1
Cable de Comunicación EtherCAT ×2
-
Módulo de Comunicación CAN Bus ×1 (adaptador USB-CAN incluido por pedido)
Dimensiones del Paquete: 100mm × 100mm × 70mm
Detalles

RMD-X4-PT2.5-10-C accionamiento de articulación de robot con codificador dual, entrada de 24V, relación de engranaje de 12.6, torque de 4N·m y salida de 100W. Presenta interfaz CAN BUS/EtherCAT, velocidad sin carga de 317RPM y peso de 0.28kg. Incluye dimensiones de instalación y especificaciones técnicas.

Actuador planetario con torque máximo de 10N.m, relación de engranaje de 12.6:1, peso de 0.33kg. Tamaño: Ø55mm×55.5mm. Presenta comunicación EtherCAT/CANBUS, codificador dual, MCU de alta velocidad, chips CAN y rodamientos de bolas de surco profundo.

Codificador dual ABS-17BIT entrada / 18BIT salida, X4-10, SN:40225621, MYACTUATOR

El actuador planetario RMD-X4-10 de MYACTUATOR ofrece 100W de potencia, 46Nm de torque, codificador dual y velocidad de 238rpm. Viene con cable de alimentación + CAN BUS, resistor de 120Ω, cable EtherCAT, módulo CAN BUS y adaptador USB-CAN gratuito.
El RMD-X4-10 Actuador Planetario Robótico tiene un codificador dual, 12.Relación de engranajes de 6, entrada de 24V, salida de 100W y CAN BUS/EtherCAT. Ofrece un par de 4N.m, una velocidad de 238 RPM, pesa 0.33kg y utiliza rodamientos de bolas de ranura profunda para alta eficiencia.

La interfaz X4-10 incluye puertos de alimentación, CAN y EtherCAT. El embalaje contiene fuente de alimentación, cables, resistencias y módulo. Dimensiones: 100x100x70mm. Incluye adaptador USB-CAN con cada pedido.

Los accesorios X4-10 incluyen fuente de alimentación, cables CAN BUS y EtherCAT, resistencia terminal y un módulo CAN BUS. Los detalles cubren conectores, funciones de los cables, líneas de señal y notas sobre el adaptador USB-CAN.
Related Collections






