





Actuador planetario MyActuator RMD-X4-36 34N·m, motor DC sin escobillas con doble codificador, EtherCAT y CAN Bus, relación de engranajes 36:1
Actuador planetario MyActuator RMD-X4-36 34N·m, motor DC sin escobillas con doble codificador, EtherCAT y CAN Bus, relación de engranajes 36:1
MyActuator
No se pudo cargar la disponibilidad de retiro
Resumen
El Motor de Corriente Continua Sin Escobillas MyActuator RMD-X4-36 es un actuador de alta rendimiento diseñado para sistemas de robótica y automatización que requieren un control de movimiento preciso, alta salida de par y una integración compacta. Con un par máximo de 34N·m, una relación de engranaje de 36:1, y una estructura de rodamientos de rodillos cruzados, ofrece una excelente capacidad de resistencia a la flexión y durabilidad. Con protocolos de comunicación dual EtherCAT + CAN y una respuesta ultra-rápida de 250μs, este actuador es ideal para robots humanoides, brazos robóticos, plataformas móviles y otras aplicaciones robóticas avanzadas. Su diseño de encoder dual (entrada ABS de 17 bits / salida de 18 bits) garantiza una precisión de posicionamiento ultra-alta, mientras que su tamaño compacto (55mm × 61mm, 0.36kg) permite una integración ligera y eficiente.
Características Clave
-
Encoder Dual de Alta Precisión: 17 bits (entrada) + 18 bits (salida) para una precisión de 0.01°.
-
Protocolos EtherCAT + CAN Bus: Comunicación flexible con respuesta ultra-rápida de 250μs.
-
Rodamientos de Rodillos Cruzados: Rendimiento superior contra la flexión y larga vida útil.
-
Alta Densidad de Potencia: Diámetro compacto de 55mm, longitud de 61mm y solo 0.36kg de peso.
-
Par Máximo 34N·m y Par Nominal 11.5N·m garantizan un movimiento de salida estable y potente.
-
Alta Eficiencia: Potencia nominal de 100W con tecnología FOC (Control Orientado a Campo) suave.
-
Aplicación Versátil: Diseñado para robots humanoides, exoesqueletos, manipuladores y sistemas de automatización.
Especificaciones
| Parámetro | Valor |
|---|---|
| Modelo | RMD-X4-P36-36-C |
| Tensión de Entrada | 24V |
| Relación de Transmisión | 36:1 |
| Velocidad sin Carga | 111 RPM |
| Corriente sin Carga | 0.9 A |
| Velocidad Nominal | 83 RPM |
| Par Nominal | 11.5 N·m |
| Potencia de Salida Nominal | 100 W |
| Par Máximo | 34 N·m |
| Corriente de Fase Máxima | 21.5 A (rms) |
| Pares de polos | 13 |
| Tipo de codificador | Codificador dual ABS de 17 bits (entrada) / 18 bits (salida) |
| Protocolos de comunicación | EtherCAT / CAN Bus |
| Tamaño | Ø55mm × 61mm |
| Peso | 0.36 kg |
Contenido del paquete
-
1 × Motor de actuador planetario RMD-X4-36
-
1 × Fuente de alimentación + Cable de comunicación CAN Bus
-
1 × Resistencia terminal de 120Ω
-
2 × Cables de comunicación EtherCAT
-
1 × Módulo de comunicación CAN Bus (adaptador USB-CAN)
Aplicaciones
-
Robots humanoides y biónicos
-
Brazos robóticos colaborativos
-
Exoesqueletos y robots de rehabilitación
-
Robots de servicio y plataformas móviles
-
Sistemas de automatización de precisión que requieren actuadores compactos y de alto par
Detalles

Actuador planetario con 34N.m par de pico, relación de engranaje 36:1, 0.Peso de 36 kg, tamaño Ø55mm×61mm. Características de comunicación EtherCAT/CANBUS, doble encoder, MCU de alta velocidad, chips CAN y rodamientos de rodillos cruzados.

Motor RMD-X4-P36-36: 24V, 10.5N.m de par, 83RPM, doble encoder, EtherCAT+CAN BUS, relación de engranaje 36, 0.36kg, encoder ABS-17BIT/18BIT, dimensiones detalladas incluidas.

Motor X4-36, 100W, 12N.m, doble encoder, entrada de 17BIT, salida de 18BIT, 63rpm, relación de engranaje 1:36, interfaz CAN bus, indicador LED.

Motor MYACTUATOR X4-36, 100W, 12N.m, doble encoder, 83rpm, relación 1:36. Incluye fuente de alimentación, cable CAN BUS, resistor de 120Ω, cables EtherCAT y módulo CAN BUS con adaptador USB-CAN gratuito.
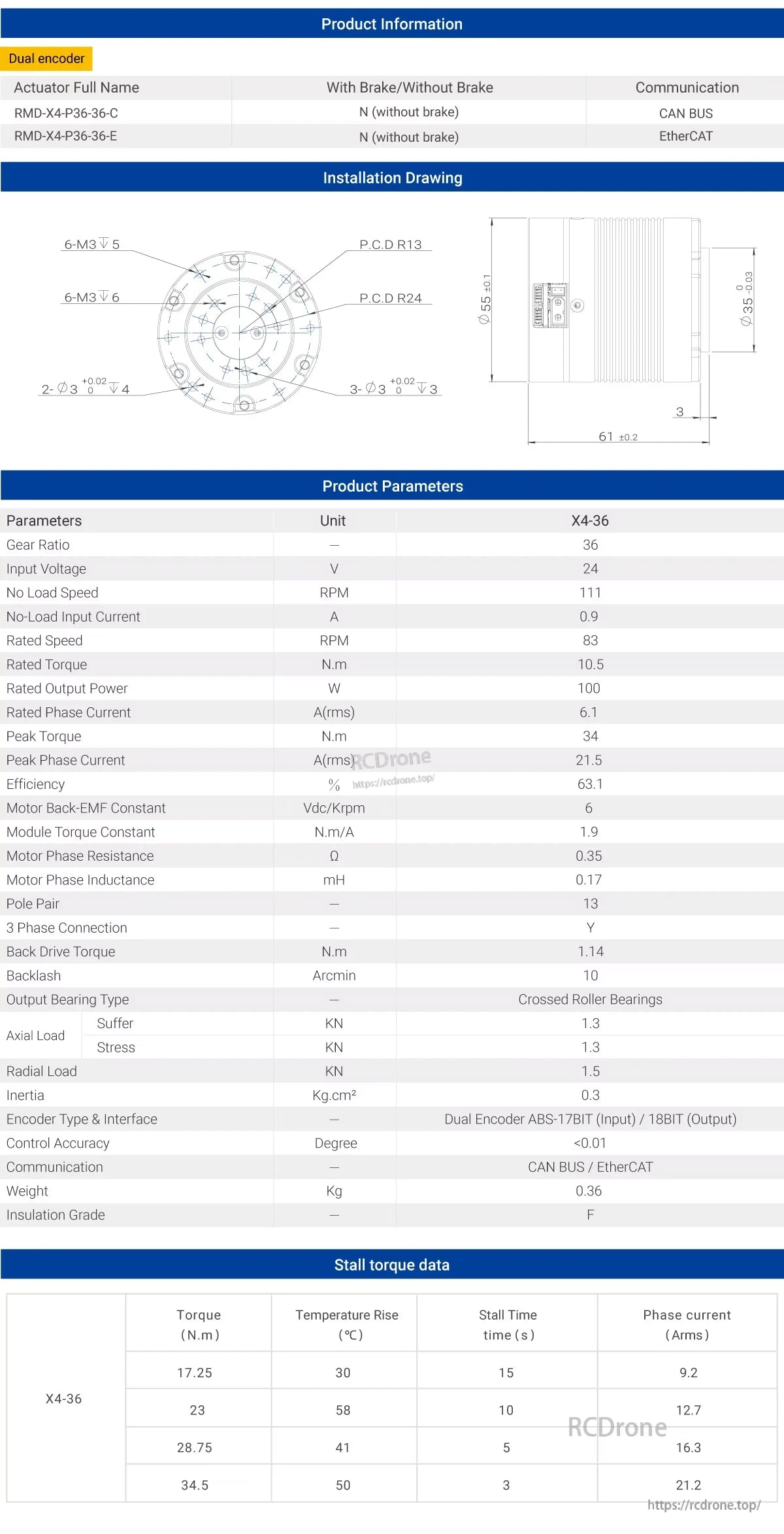
El motor RMD-X4-P36-36 tiene doble encoder, relación de engranaje 36, entrada de 24V, salida de 100W, CAN BUS/EtherCAT. Par nominal: 10.5 N.m, velocidad: 83 RPM, peso: 0.36 kg. Los datos de par de bloqueo incluyen par, aumento de temperatura, tiempo y valores de corriente de fase.

Los detalles de la interfaz incluyen puertos de alimentación, CAN y EtherCAT. El embalaje incluye motor, cables, resistencias y módulos de comunicación. Dimensiones: 100x100x70mm. Incluye adaptador USB-CAN.
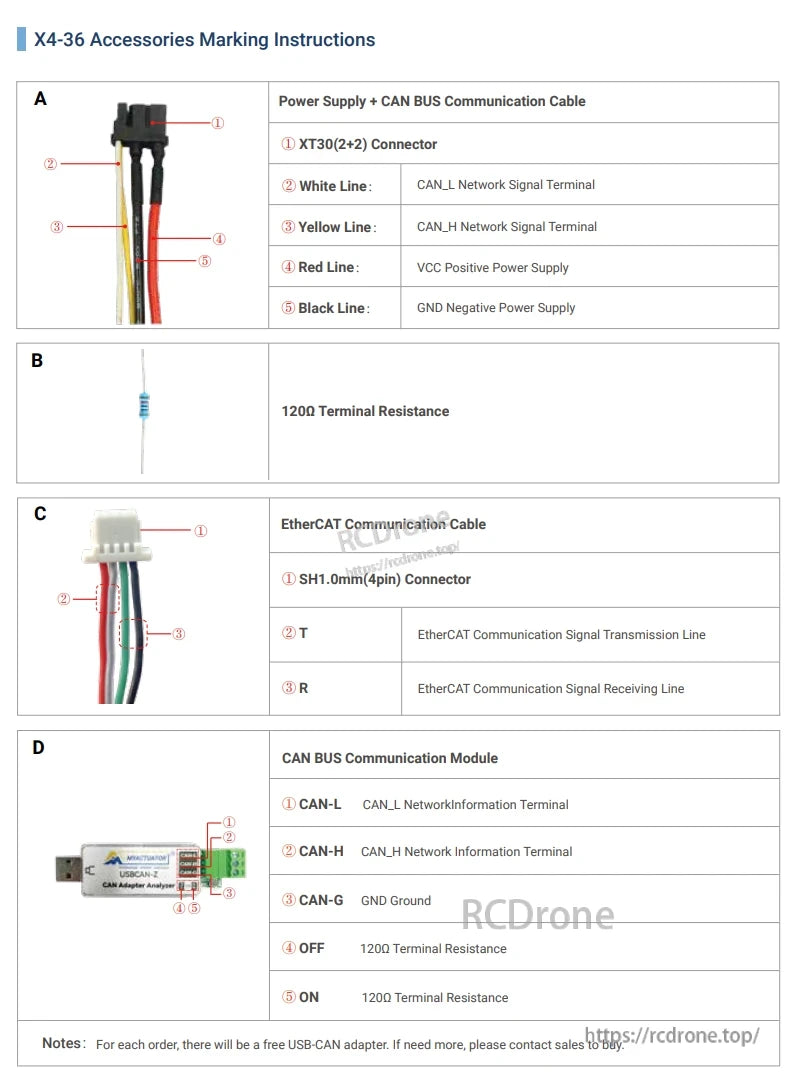
Los accesorios X4-36 incluyen fuente de alimentación, cables CAN BUS, EtherCAT, resistencia de 120Ω y módulo CAN. Los detalles cubren conectores, colores de cables, líneas de señal y configuraciones de terminales para conexiones de comunicación y alimentación. Adaptador USB-CAN incluido con cada pedido.
Related Collections





