





Actuador servo de doble codificador MyActuator RMD-X6-60 320W 20N·m 60N·m pico 48V EtherCAT CAN BUS motor de articulación robótica de alta precisión
Actuador servo de doble codificador MyActuator RMD-X6-60 320W 20N·m 60N·m pico 48V EtherCAT CAN BUS motor de articulación robótica de alta precisión
MyActuator
No se pudo cargar la disponibilidad de retiro
Resumen
El actuador servo inteligente MyActuator RMD-X6-60 es una unidad de accionamiento integrada, compacta y de alto rendimiento, diseñada para aplicaciones de robótica, automatización y control de movimiento de precisión. Equipado con interfaces de comunicación EtherCAT y CAN BUS y un sistema de codificadores dual, este actuador ofrece alta densidad de par, control preciso y gestión de movimiento en múltiples modos. Es ideal para juntas robóticas, brazos robóticos, robots móviles y sistemas de automatización industrial que requieren alta precisión y fiabilidad.
Parámetros Clave:
-
Potencia Nominal: 320W
-
Par Nominal: 20N·m
-
Par Máximo: 60N·m
-
Velocidad Nominal: 153RPM
-
Relación de Transmisión: 19.612:1
-
Precisión del Codificador Dual: 17bit Entrada / 17bit Salida
-
Protocolos de Comunicación: CAN BUS, EtherCAT
-
Tensión de Entrada: 48V
Características Clave
-
Diseño de Codificador Dual
Codificadores integrados de 17 bits de entrada y salida proporcionan retroalimentación precisa para un control de movimiento exacto y monitoreo de estado. -
Soporte Multi-Protocolo
Interfaces EtherCAT y CAN BUS integradas aseguran una amplia compatibilidad con diferentes plataformas de control robótico y de automatización. -
Alta Densidad de Potencia y Par
Capaz de entregar 320W de potencia continua y 60N·m de par máximo, cumpliendo con las demandas de aplicaciones dinámicas y de carga pesada. -
Modos de Control Híbridos
Soporta control híbrido de posición, velocidad y torque, permitiendo sistemas de movimiento avanzados de múltiples ejes y coordinados. -
Retroalimentación de Alta Precisión y Respuesta Rápida
MCU de alta velocidad y procesadores CAN integrados proporcionan una respuesta a nivel de milisegundos para un control preciso. -
Diseño Compacto y Ligero
Dimensiones de 120mm × 120mm × 80mm y un peso de 0.82kg lo hacen ideal para aplicaciones robóticas ligeras donde el espacio y el peso son críticos.
Especificaciones Técnicas
| Parámetro | Valor |
|---|---|
| Modelo | RMD-X6-P20-60-C |
| Tensión de Entrada | 48V |
| Potencia Nominal | 320W |
| Par Nominal | 20N·m |
| Par Máximo | 60N·m |
| Velocidad Nominal | 153RPM |
| Velocidad Sin Carga | 176RPM |
| Corriente Nominal | 9.5A (RMS) |
| Corriente Sin Carga | 0.9A |
| Corriente Máxima | 29.1A (RMS) |
| Relación de Transmisión | 19.612:1 |
| Pares de Polos | 10 |
| Resolución del Encoder | Entrada: 17bit / Salida: 17bit |
| Peso | 0.82kg |
Descripción de la interfaz
Puertos de alimentación y comunicación
| Puerto | Descripción |
|---|---|
| EtherCAT_OUT | Puerto de salida EtherCAT |
| EtherCAT_IN | Puerto de entrada EtherCAT |
| CAN_L | Terminal de señal CAN baja |
| CAN_H | Terminal de señal CAN alta |
| GND | Fuente de alimentación negativa |
| VCC | Fuente de alimentación positiva |
Terminales de señal
R+/R-: Datos de retroalimentación del módulo a la estación maestra
-
T+/T-: Señales de comando de control de la estación maestra al módulo
Dimensiones y Estructura
-
Diámetro: 120mm
-
Altura: 80mm
-
Orificios de Montaje: P.C.D R26.25 y R22 con 12 × orificios roscados M4
-
Eje de salida: Interfaz de brida estándar para acoplamiento flexible con componentes externos
Información de embalaje
| Artículos incluidos | Cantidad |
|---|---|
| Fuente de alimentación + Cable de comunicación CAN BUS | 2 pcs |
| Cable de comunicación EtherCAT | 2 pcs |
| Resistencia terminal de 120Ω | 1 pc |
| Módulo de comunicación CAN BUS (Adaptador USB-CAN) | 1 pc |
Dimensiones del embalaje:
-
Longitud × Ancho × Altura: 120mm × 120mm × 80mm
Accesorios y Conexiones
Fuente de Alimentación + Cable CAN BUS
-
Conector: XT30 (2+2)
-
Linea Blanca: señal CAN_L
-
Linea Amarilla: señal CAN_H
-
Linea Roja: suministro de energía positiva VCC
-
Linea Negra: suministro de energía negativa GND
Cable de Comunicación EtherCAT
-
Conector: SH1.0mm (4-pin)
-
Línea T: Transmisión de señal de comunicación EtherCAT
-
Línea R: Recepción de señal de comunicación EtherCAT
Módulo CAN BUS
-
Terminales: CAN_L, CAN_H, CAN_G, y terminación 120Ω conmutada (ON/OFF)
-
Adaptador USB-CAN proporcionado gratis con cada pedido
Aplicaciones
-
Juntas de Robots Colaborativos
-
Robots de Servicio y Humanos
-
Sistemas de Dirección o Tracción de Robots Móviles
-
Brazos Robóticos Industriales
-
Sistemas de Control de Movimiento de Alta Precisión
Plataformas de Investigación y Educativas
Resumen
El MyActuator RMD-X6-60 integra encoders duales de alta precisión, protocolos de comunicación EtherCAT y CAN BUS, alta densidad de par y un factor de forma compacto, lo que lo convierte en una solución versátil y confiable para robótica y automatización industrial. Con su potencia de 320W, 60N·m de par máximo y retroalimentación de alta resolución de 17 bits, este actuador servo ofrece un rendimiento excepcional y precisión de control para proyectos avanzados de robótica.
Detalles
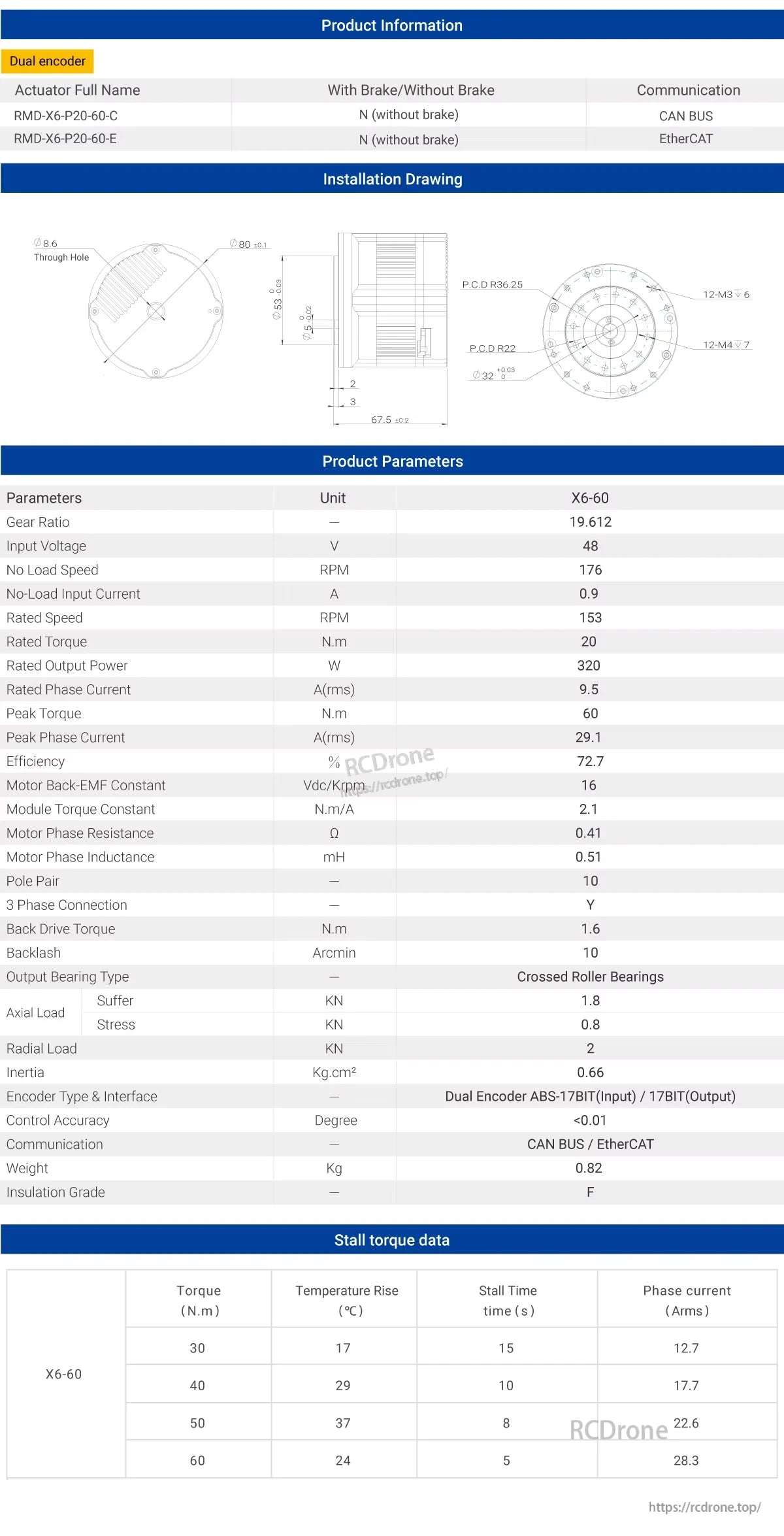
El actuador servo RMD-X6-60 tiene un encoder dual, una relación de engranaje de 19.612, entrada de 48V, potencia de 320W, comunicación CAN BUS/EtherCAT, 20 N.mpar nominal, 60 N.mpar máximo, y pesa 0.82 kg.
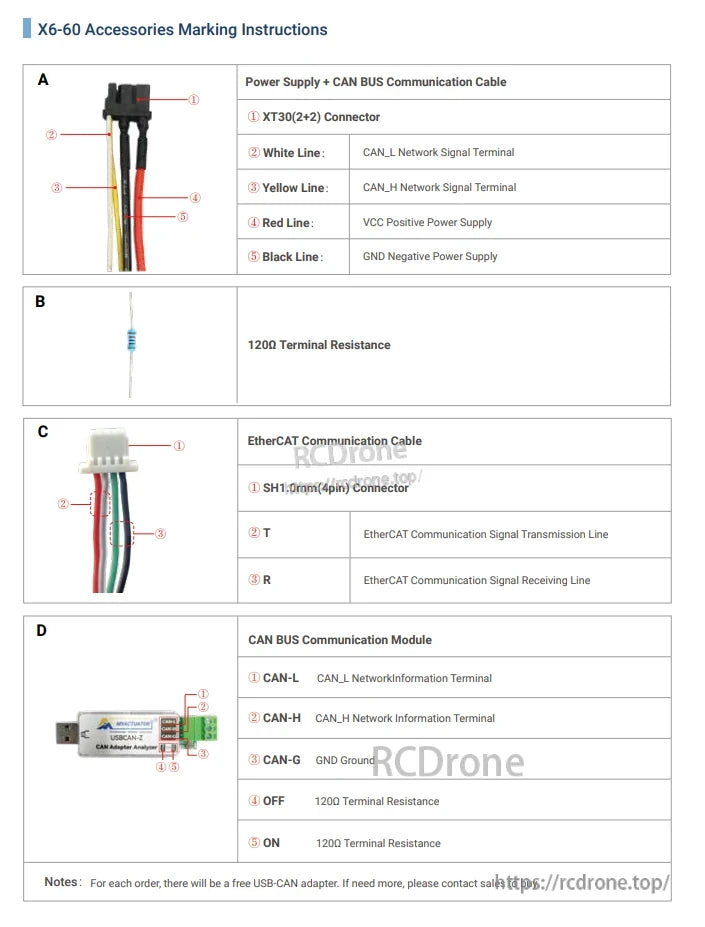
Los accesorios X6-60 incluyen cable de alimentación y CAN BUS con cables codificados por colores, resistencia terminal de 120Ω, cable EtherCAT con líneas T/R, y un módulo CAN BUS con terminales para CAN-L, CAN-H, GND, y configuraciones de resistencia terminal. Se incluye un adaptador USB-CAN gratuito por pedido.

Actuador servo RMD-X6-P20-60-C con EtherCAT+CAN BUS, 19.612 relación, entrada de 48V, velocidad nominal de 153RPM, torque de 20Nm, salida de 320W, codificador dual, MCU de alta velocidad y chip CAN, rodamiento de rodillos cruzados.
Codificador dual ABS-17BIT Entrada/Salida, Actuador Servo X6-60, 300W, 20N.m, 128rpm, soporta control híbrido de fuerza-posición, control de torque preciso.
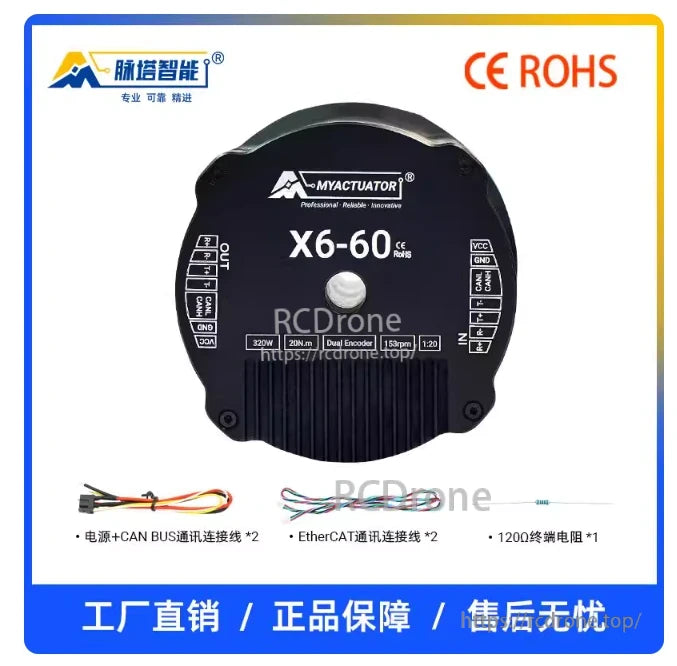
Actuador servo X6-60, 320W, 20N.m, codificador dual, 158rpm, relación 1:20, con cables CAN BUS y EtherCAT, terminador de 120Ω, certificado CE ROHS.

Embalaje del Actuador Servo RMD-X6-60 con cableado CAN BUS, cable de alimentación y resistor de terminación de 1200.





