




Actuador de Servomotor MyActuator RMD-X8-120 48V 574W 110N·m Par Máximo Doble Encoder EtherCAT CAN BUS para Robots y Brazos Robóticos
Actuador de Servomotor MyActuator RMD-X8-120 48V 574W 110N·m Par Máximo Doble Encoder EtherCAT CAN BUS para Robots y Brazos Robóticos
MyActuator
No se pudo cargar la disponibilidad de retiro
Descripción
El motor servo MyActuator RMD-X8-120 integra una caja de engranajes planetaria, encoders duales de 17 bits, y un controlador de accionamiento de alto rendimiento, ofreciendo un par potente y un control de movimiento preciso. Con una potencia nominal de 574W, un par nominal de 43N·m, y hasta un par máximo de 110N·m, es ideal para robots humanoides, brazos robóticos, robots cuadrúpedos y otros sistemas de automatización inteligente. Soportando protocolos CAN BUS y EtherCAT, asegura una integración fluida con plataformas robóticas modernas.
Especificaciones Clave
| Parámetro | Valor |
|---|---|
| Modelo | RMD-X8-P20-120-C |
| Relación de Engranajes | 19.612:1 |
| Tensión | 48V |
| Velocidad sin carga | 158 RPM |
| Velocidad nominal | 127 RPM |
| Corriente sin carga | 1.6 A |
| Par nominal | 43 N·m |
| Par máximo | 110 N·m |
| Corriente de fase máxima | 43.8 A (rms) |
| Potencia nominal | 574 W |
| Peso | 1.4 kg |
| Dimensiones | Φ96 mm × 76 mm de altura |
| Tipo de Encoder | Encoder Dual ABS-17BIT (Entrada) / 17BIT (Salida) |
| Comunicación | CAN BUS / EtherCAT |
Interfaz y Conectividad
-
EtherCAT IN/OUT para comunicación en tiempo real y alta velocidad
-
CAN_H & CAN_L terminales para redes CAN BUS
-
VCC/GND para entrada de alimentación (48V)
-
Canales de señal (T-/T+/R-/R+) para retroalimentación de comando y estado
Accesorios incluidos
-
2× Fuente de alimentación + cables de comunicación CAN BUS
2× Cables de comunicación EtherCAT
-
1× Resistor terminal de 120Ω
-
1× Módulo de comunicación CAN BUS con adaptador USB-CAN
Características Clave
-
Control de Alta Precisión – Duales encoders absolutos de 17 bits permiten un control preciso de posición, velocidad y torque.
-
Salida de Alto Par – Par nominal 43N·m, pico 110N·m para cargas exigentes.
-
Diseño Integrado – Estructura compacta con caja de engranajes planetaria y módulo de accionamiento para una fácil instalación.
-
Soporte de Doble Protocolo – Compatible con CAN BUS y EtherCAT para una integración flexible.
-
Construcción Robusta – Rodamientos de rodillos cruzados de alta resistencia garantizan durabilidad bajo cargas pesadas.
Aplicaciones
-
Juntas de robots humanoides
-
Brazos robóticos colaborativos
-
Robots cuadrúpedos y bípedos
-
Sistemas de exoesqueleto
-
Plataformas móviles autónomas
-
Automatización industrial de alta precisión
Detalles

El actuador servo M-RMD X8-120 ofrece doble encoder, entrada de 48V, 43 N.m de par, 574W de potencia, CAN BUS/EtherCAT, relación de engranaje de 19.612, 10 pares de polos, peso de 1.40 kg y detalles de par de estancamiento.
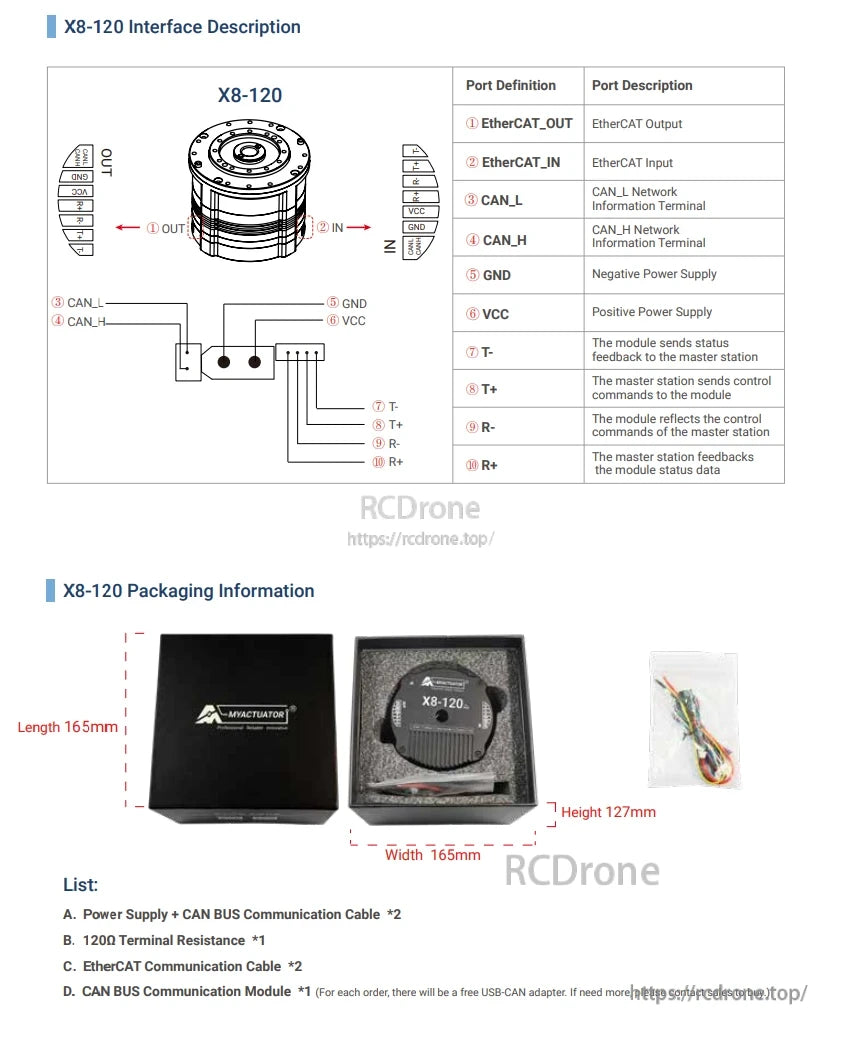
La interfaz servo X8-120 soporta EtherCAT y CAN bus, incluye conexiones de potencia y señal, y adaptador USB-CAN. Embalaje: 165x165x127mm. Contiene fuente de alimentación, cables, resistencia terminal y módulo de comunicación.

Los accesorios de MyActuator X8-120 incluyen fuente de alimentación con cable CAN BUS, resistencia terminal de 120Ω, cable EtherCAT y módulo CAN BUS. Los detalles cubren conectores, funciones de cable y terminales para comunicación y alimentación. Adaptador USB-CAN gratuito incluido por pedido.

MyActuator motor servo X8-120, 574W, 45N.m, doble encoder, 127rpm, relación 1:20. Incluye cables de alimentación+CAN BUS, cables EtherCAT y terminador de 120Ω. Certificado CE ROHS.

Servo de doble encoder EtherCAT + CAN BUS, modelo RMD-X8-P20-120-C, 48V, relación de reducción 19.612, 127RPM, 43N.m de par, 574W de salida, 1.4kg de peso, con MCU de alta velocidad, chip CAN y rodamientos de rodillos cruzados.

Encoder Doble ABS-17BIT Entrada/Salida, X8-120CL, soporta control híbrido de fuerza-posición, control de par preciso.

Servo MYACTUATOR X8-120 con cables de alimentación, CAN BUS, EtherCAT y terminador de 120Ω. El embalaje incluye dos de cada uno de los cables de alimentación y comunicación.

Módulo de engranaje planetario integrado, doble encoder, comunicación EtherCAT/CAN, par máximo 120N.m, dimensiones 96mm×76mm, para juntas robóticas.
Related Collections




