Elephant Robotics myCobot 320 M5 Brazo Robótico Colaborativo de 7 Ejes, 1kg, 350mm, ROS/Python
Elephant Robotics myCobot 320 M5 Brazo Robótico Colaborativo de 7 Ejes, 1kg, 350mm, ROS/Python
Yahboom
No se pudo cargar la disponibilidad de retiro
Resumen
El Elephant Robotics myCobot 320 M5 es una plataforma de desarrollo de brazo robótico colaborativo programable de 7 ejes, construida alrededor de M5Stack-Basic, ESP32-Pico y control colaborativo multi-core M5Stack-Atom. Soporta programación visual myBlockly, desarrollo en Python y desarrollo en ROS, con una carga útil de hasta 1 kg, un radio de trabajo de hasta 350 mm (excluyendo el agarre) y una precisión de posicionamiento de ±0.5 mm.
Características Clave
- Programación multi-entorno: myBlockly (visual), Python, ROS; también soporta C++, C#, JavaScript y flujos de trabajo basados en JavaScript como se indica.
- Control colaborativo multi-core: controlador principal M5Stack-Basic + ESP32-Pico a bordo y control colaborativo M5Stack-Atom.
- Movimiento de alto rendimiento: carga útil 1000 g, radio de trabajo 350 mm (excluyendo el agarre) / 470 mm (incluyendo el agarre), precisión de posicionamiento ±0.5 mm.
- Configuración de hardware: matriz LED de 5*5, pantalla LED de 2 pulgadas y capacidad de doble pantalla.
- Expansión de E/S industrial: interfaz eléctrica industrial de 24V y 24V E/S x 12 pcs; incluye interfaz PLC e interfaz de parada de emergencia.
- Herramientas de enseñanza & aprendizaje: arrastrar para enseñar, cinemática inversa, módulos de algoritmos de cinemática directa e inversa, soporte de simulación ROS, cursos prácticos y guía de uso del gripper final.
- Conectividad: USB, WIFI, Bluetooth; interfaz Tipo-C.
- Control móvil: aplicación MyCobot Controller a través de Bluetooth (solo Android).
Para preguntas de compatibilidad previas a la venta (controladores, entornos de software o grippers opcionales), contacta [email protected] or visita https://rcdrone.top/.
Especificaciones
| Marca | Elephant Robotics |
| Modelo | myCobot 320 M5 |
| Tipo | Brazo robótico colaborativo |
| Ejes / DOF | 7 ejes; diferencias de configuración mostradas: myCobot 320 M5 (6 DOF) / myCobot 320 M5 + Pinza adaptativa (7 DOF) |
| Carga útil | 1000 g (1 kg) |
| Peso del cuerpo | 3.3 kg |
| Radio de trabajo | 350 mm (excluyendo la pinza); 470 mm (incluyendo la pinza) |
| Precisión de posicionamiento | ±0.5 mm |
| Rango de articulación (mostrado) | J1: -165° a +165° |
| Controlador principal | M5Stack-Basic |
| Control a bordo | ESP32-Pico, M5Stack-Atom |
| Memoria flash (controlador) | 16MB FLASH |
| Inalámbrico (controlador) | 2.Antena 4G, Bluetooth |
| Displays | Matriz 5*5 LED; pantalla LED de 2 pulgadas; pantalla dual |
| I/O industrial | I/O 24V x 12 pcs; interfaz eléctrica industrial de 24V |
| Otras interfaces / controles (mostrados) | Interfaz Tipo-C; interfaz LEGO; interfaz PLC; interfaz de parada de emergencia; botón personalizado x 4 pcs |
| Servos (mostrados) | Servo de alto rendimiento x 6 pcs |
| Métodos de conexión (software) | USB, WIFI, Bluetooth |
| Lenguajes de programación soportados (mostrados) | Python, C++, Arduino, C#, JS |
| Plataformas de desarrollo (mostradas) | Android, Windows, Mac OSX, Linux |
Efector final opcional (mostrado): myGripperF100 Gripper Controlado por Fuerza
| Material | PC, PBT |
| Mano de obra | Moldeo por inyección |
| Rango de agarre | 0-100 mm (punto de contacto predeterminado) |
| Carga nominal | 500 gramos |
| Precisión de repetibilidad | 0.5 mm |
| Fuerza de sujeción | Par controlable; soporta ajuste de par de múltiples velocidades |
| Puntas flexibles | Configuración estándar; soporta el reemplazo de puntas flexibles (de forma gratuita) |
| Display | Muestra el ángulo del agarre, velocidad, corriente, información de entrada y salida de 10 niveles |
| Interfaz de control | Control RS485/IO control IO/control de botón |
| Dimensiones | 156X106X61mm |
| Peso | 340 g |
| Escenario de agarre (mostrado) | Objetos de 0-100 mm; adecuado para objetos frágiles como huevos, tofu, frutas, etc. |
Aplicaciones
- Educación y formación: principios de control de robots, cinemática inversa y demostraciones de arrastrar para enseñar
- Desarrollo de simulación ROS y verificación de algoritmos en un entorno virtual
- Prototipado para creadores e investigación con programación visual (myBlockly) y Python
- Demostraciones relacionadas con IA/visión, como clasificación de artículos y reconocimiento de imágenes (como se describe)
Video tutorial
Detalles

Elephant Robotics myCobot 320 M5 es un brazo robótico colaborativo compacto para el desarrollo en Python y ROS con una carga útil de hasta 1 kg.

Programa en myBlockly, Python o ROS, luego expande a flujos de trabajo avanzados como cinemática inversa, arrastrar para enseñar y control de aplicaciones.

Agregue el gripper controlado por fuerza opcional para un trabajo de recogida y colocación más flexible con fuerza de agarre ajustable y puntas reemplazables.
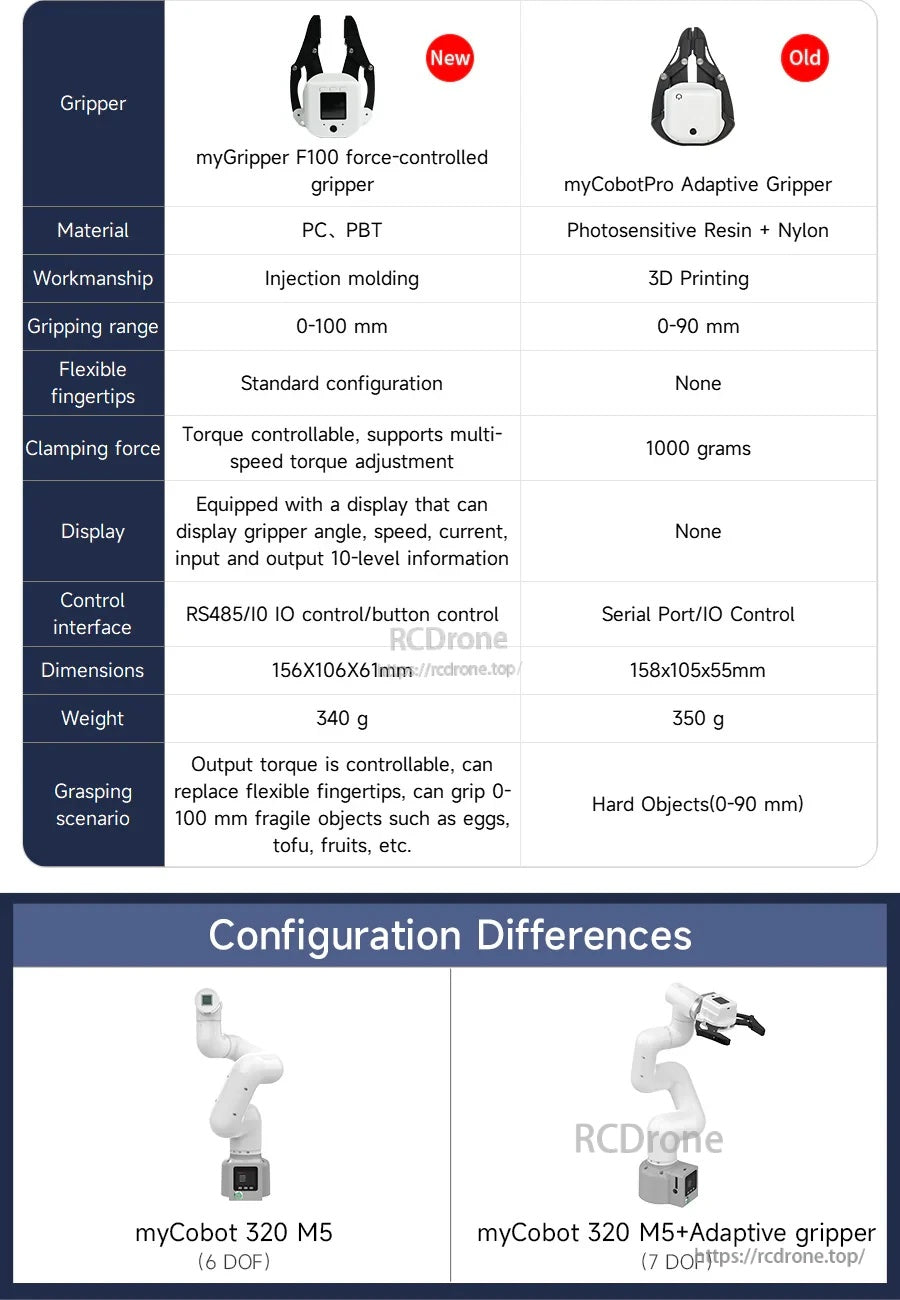
Elija entre las configuraciones de gripper controlado por fuerza y adaptativo según su rango de agarre y necesidades de interfaz de control.

La I/O industrial de 24V incorporada, la interfaz de parada de emergencia y las pantallas a bordo apoyan un prototipado más seguro y una integración de estilo industrial.

M5Stack-Basic actúa como el controlador principal, con ESP32-Pico y M5Stack-Atom proporcionando control colaborativo para una operación receptiva.
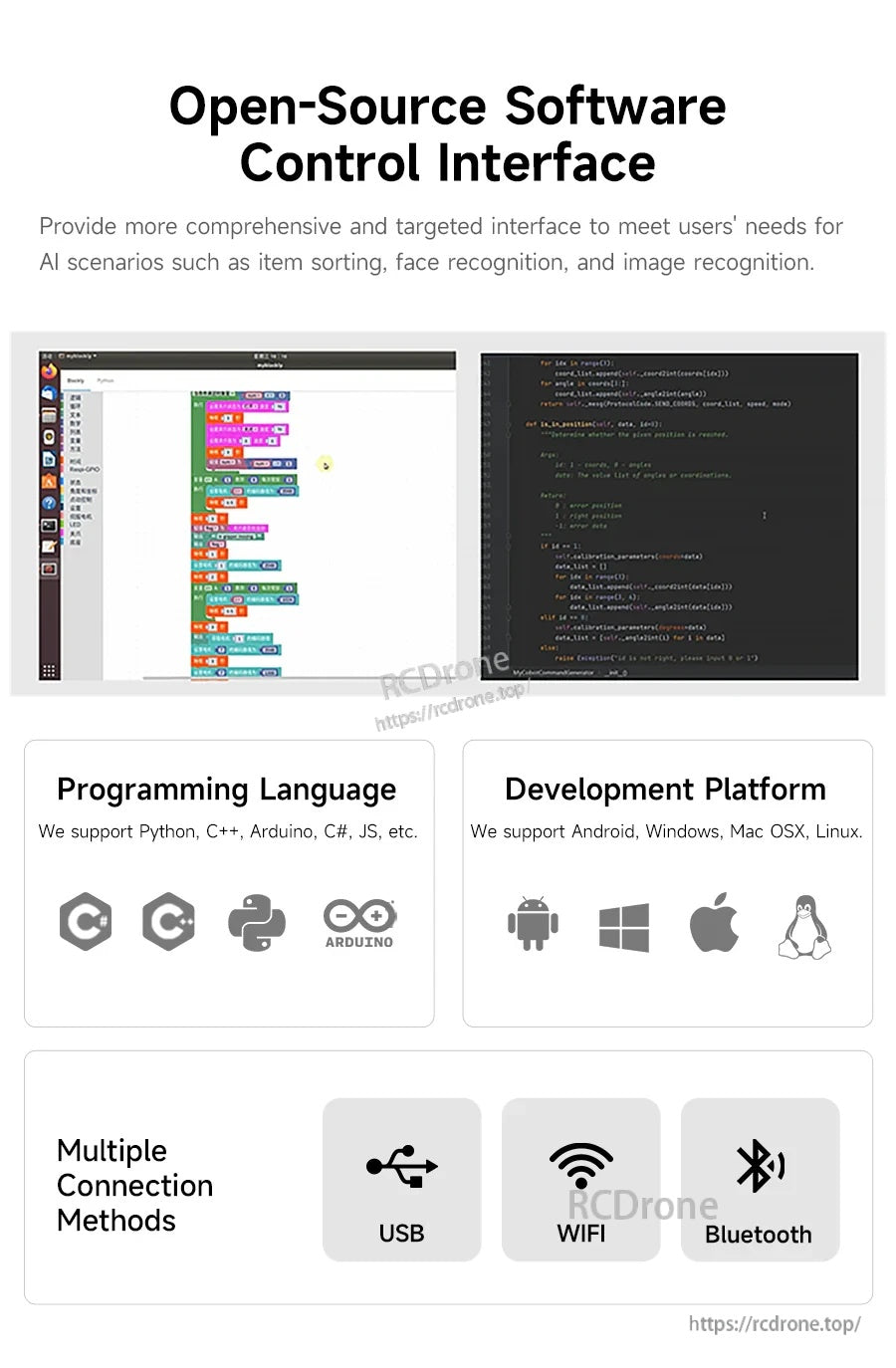
Desarrolle en Windows, macOS, Linux o Android utilizando interfaces abiertas, y conéctese a través de USB, Wi‑Fi o Bluetooth.
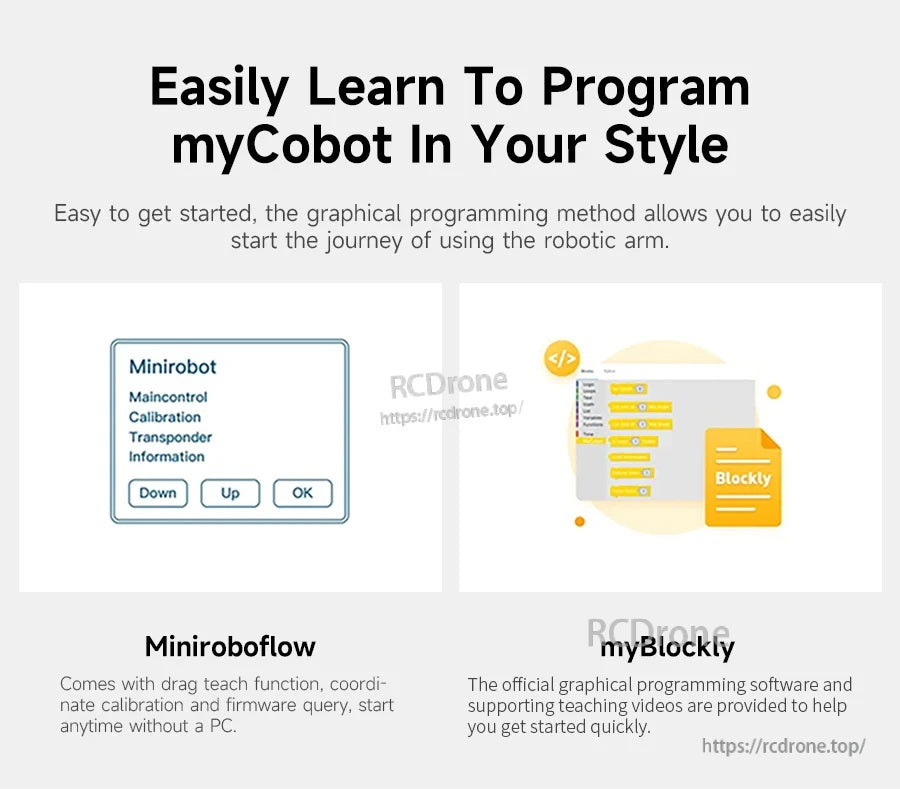
Comience rápidamente con programación gráfica y herramientas guiadas para calibración, transporte y control básico del robot.
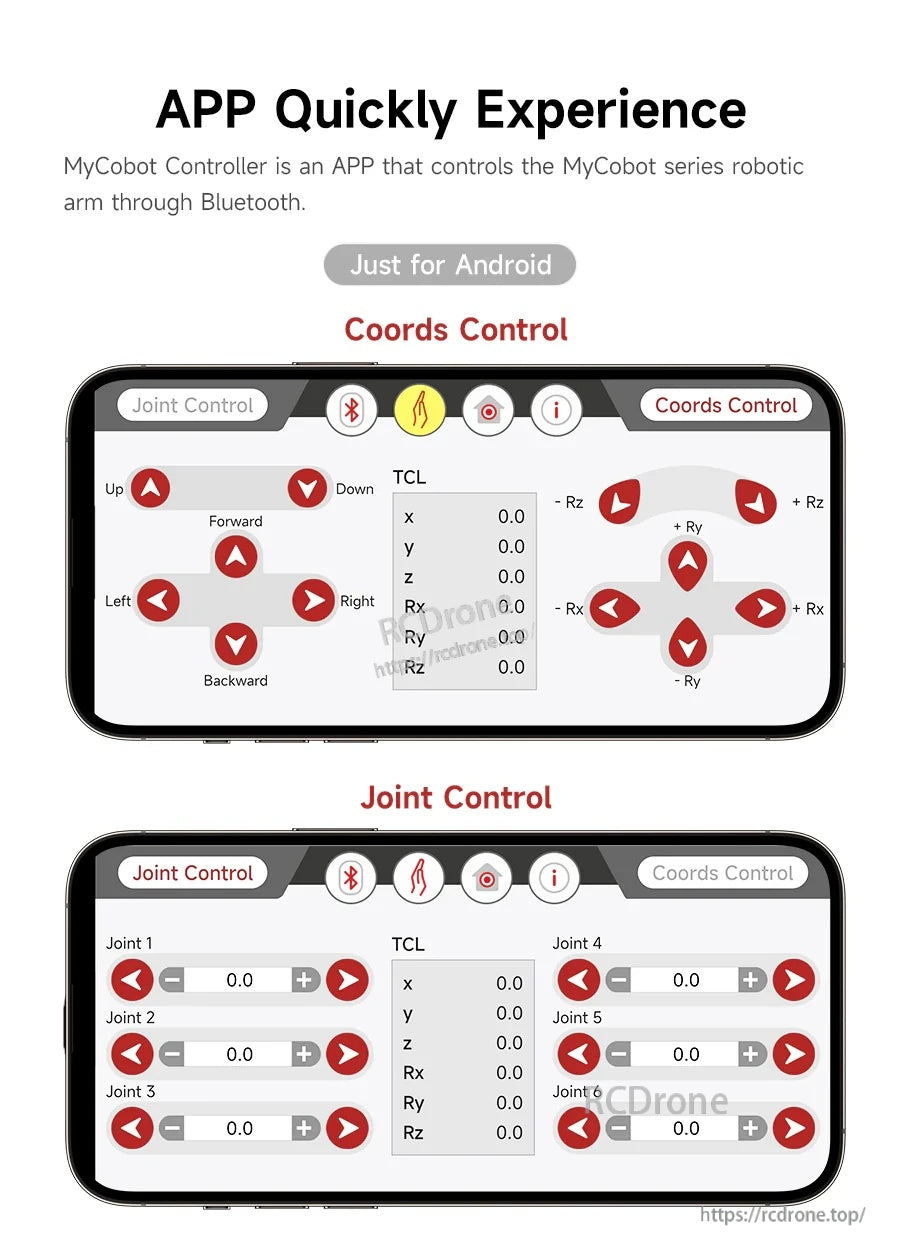
El control de la aplicación Bluetooth en Android permite movimientos conjuntos rápidos y desplazamientos coordinados durante la configuración y las pruebas.
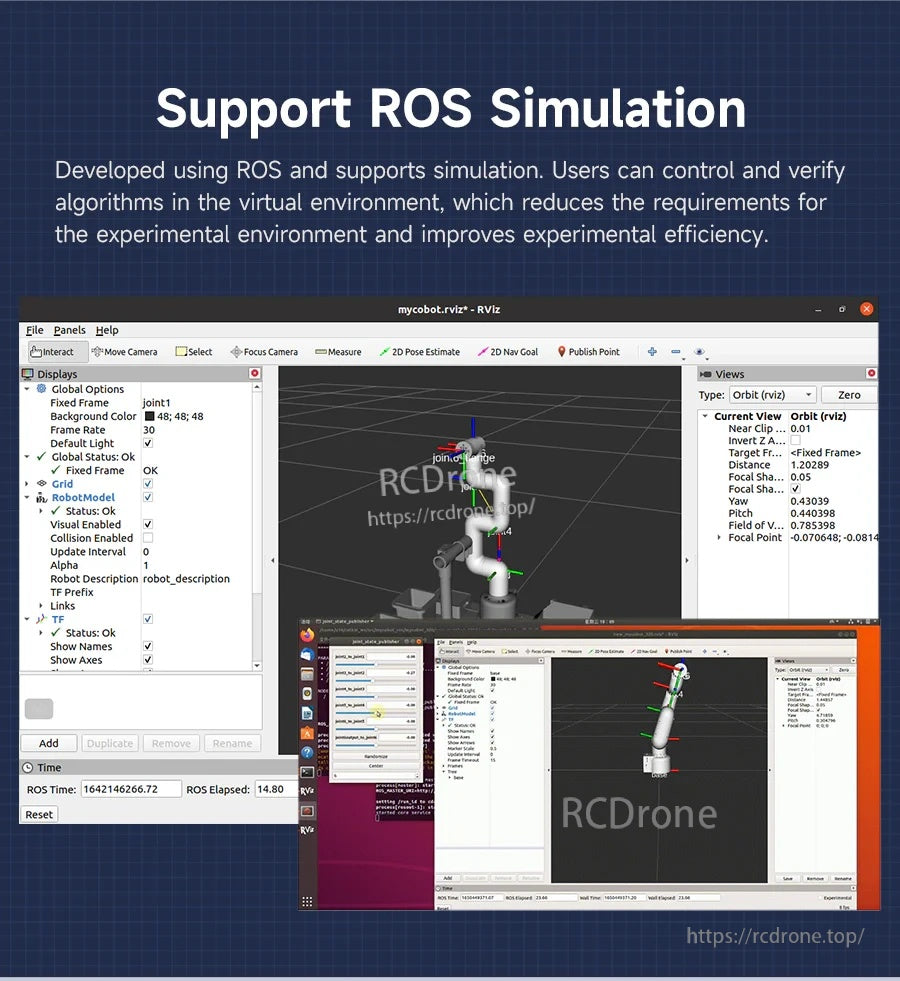
La simulación ROS ayuda a validar la planificación de movimientos y los algoritmos de control antes de ejecutarlos en el brazo físico.

Los módulos de cinemática directa e inversa integrados apoyan la enseñanza, la planificación de trayectorias y el desarrollo de movimientos repetibles.
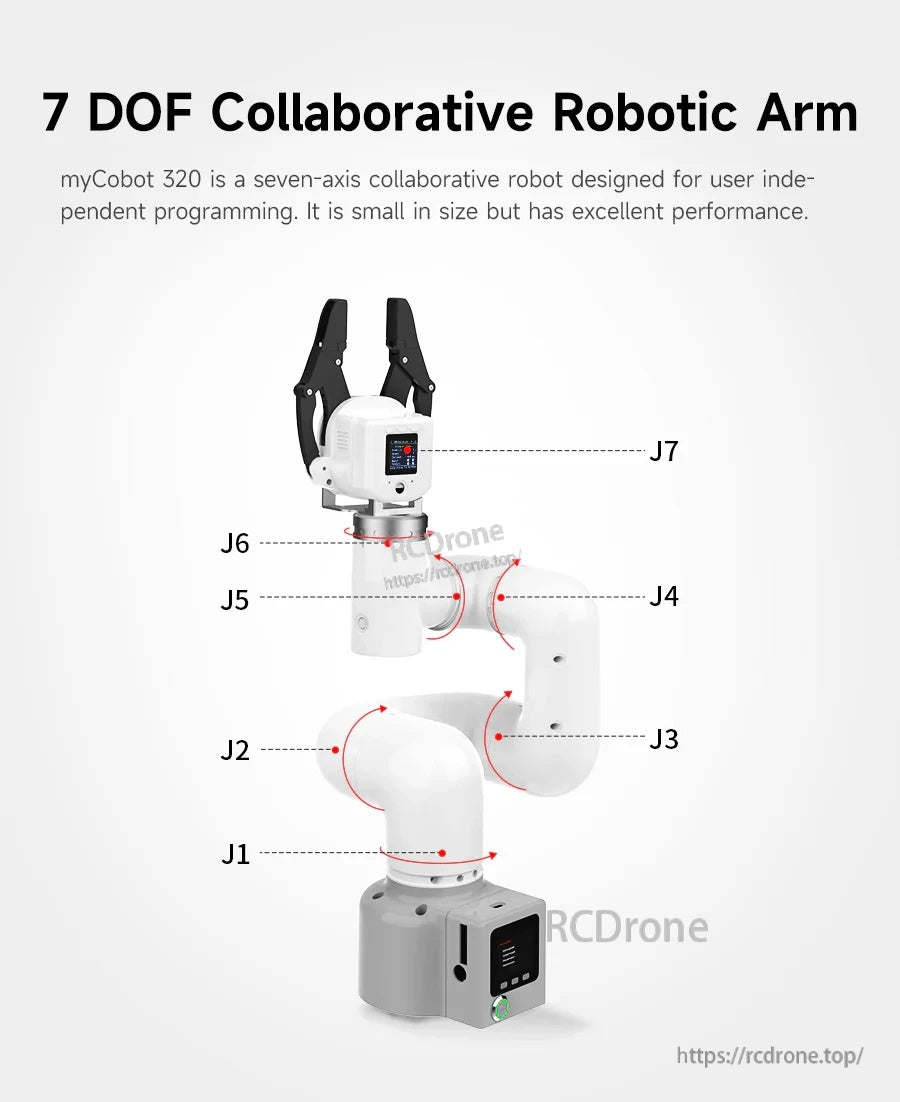
El diseño de las articulaciones está claramente mapeado de J1 a J7 para facilitar la programación, la enseñanza y la solución de problemas.
Una estructura articulada compacta proporciona un amplio rango de movimiento para educación, laboratorios y automatización de escritorio.
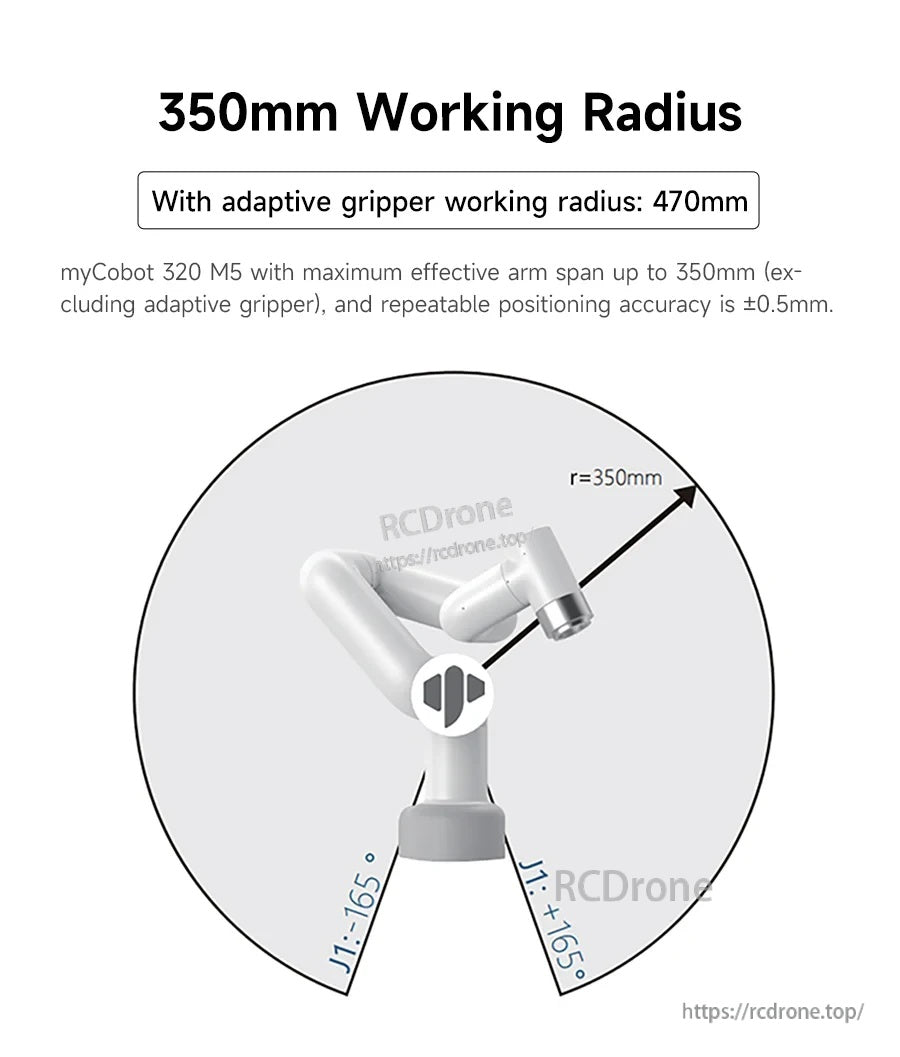
Un radio de trabajo de 350 mm soporta tareas de escritorio, con un alcance extendido disponible al usar un agarre adaptativo.

Los flujos de trabajo de desarrollo visual se pueden utilizar para demostraciones interactivas, como el seguimiento de objetos y rutinas de automatización simples.
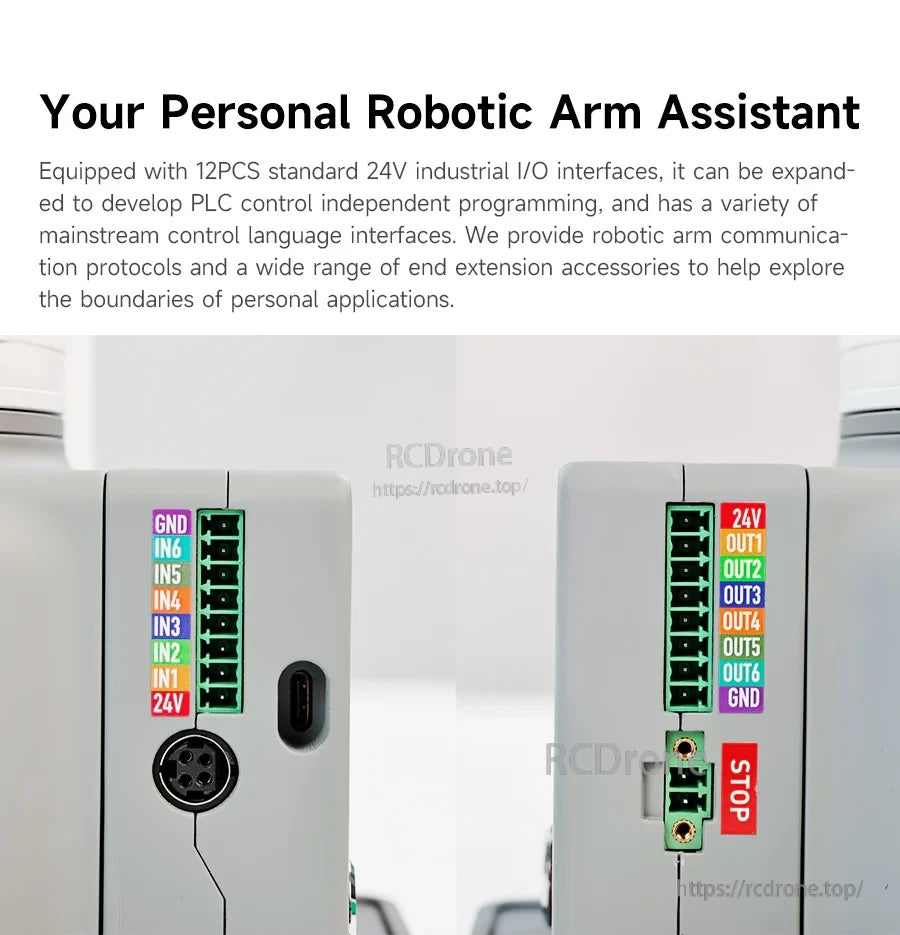
La base proporciona entradas/salidas de 24V claramente etiquetadas para integrar sensores, señales estilo PLC y controles de seguridad.
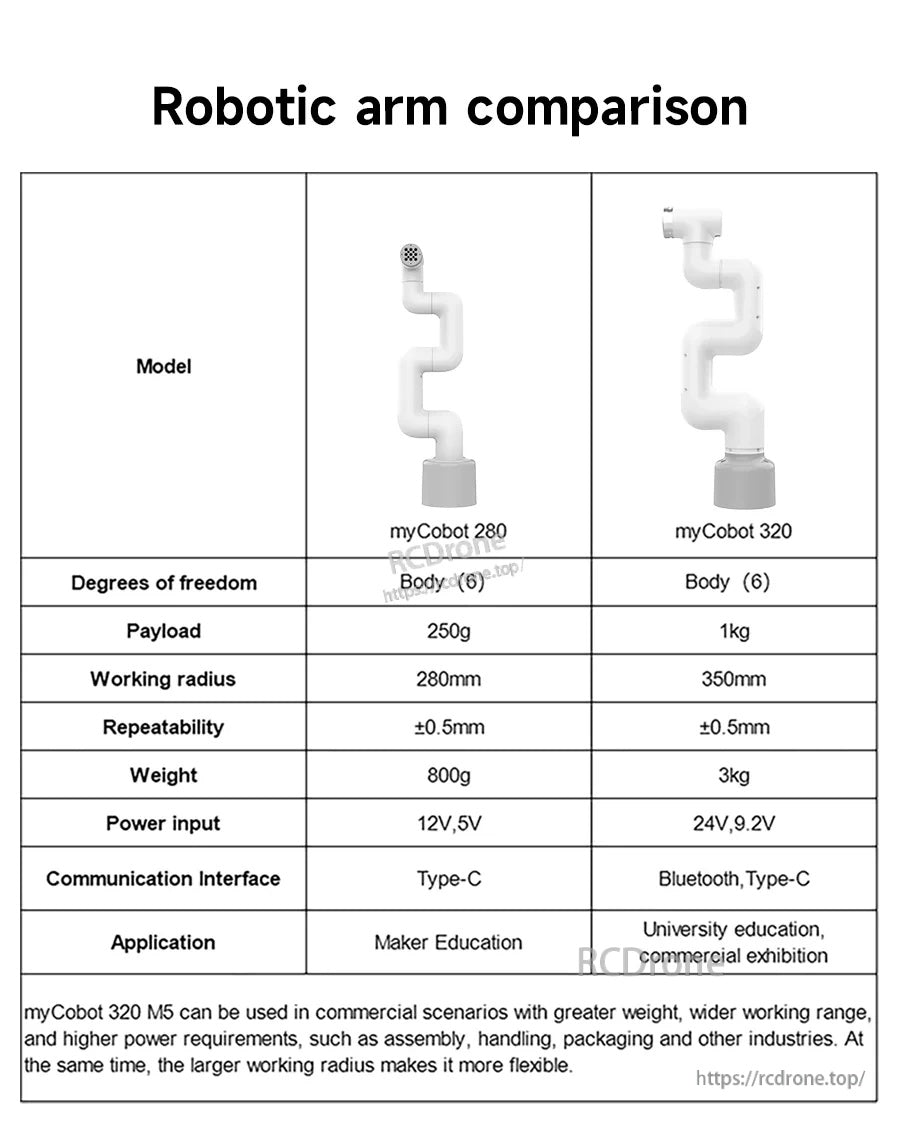
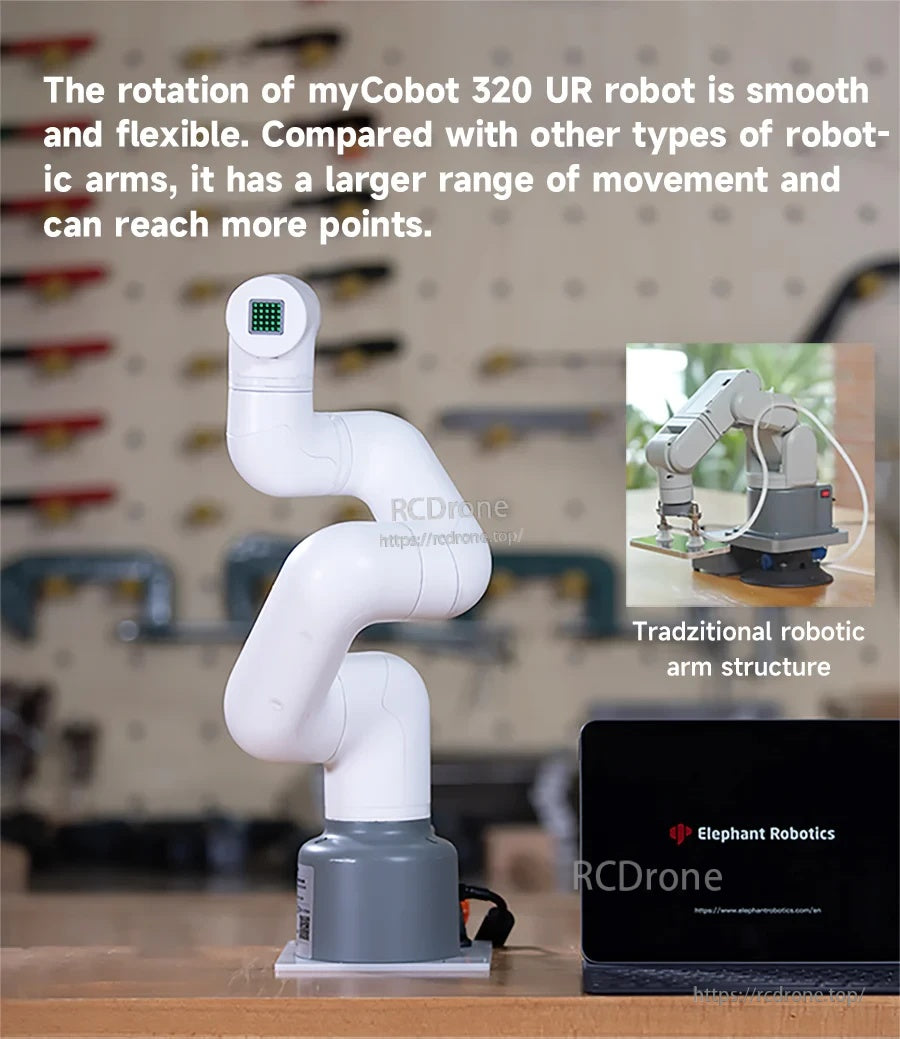
Una comparación lado a lado destaca las ventajas del myCobot 320 en capacidad de carga y radio de trabajo para aplicaciones más amplias.

Adecuado para proyectos de creadores, laboratorios de enseñanza universitaria, desarrollo impulsado por simulación y flujos de trabajo comerciales ligeros.
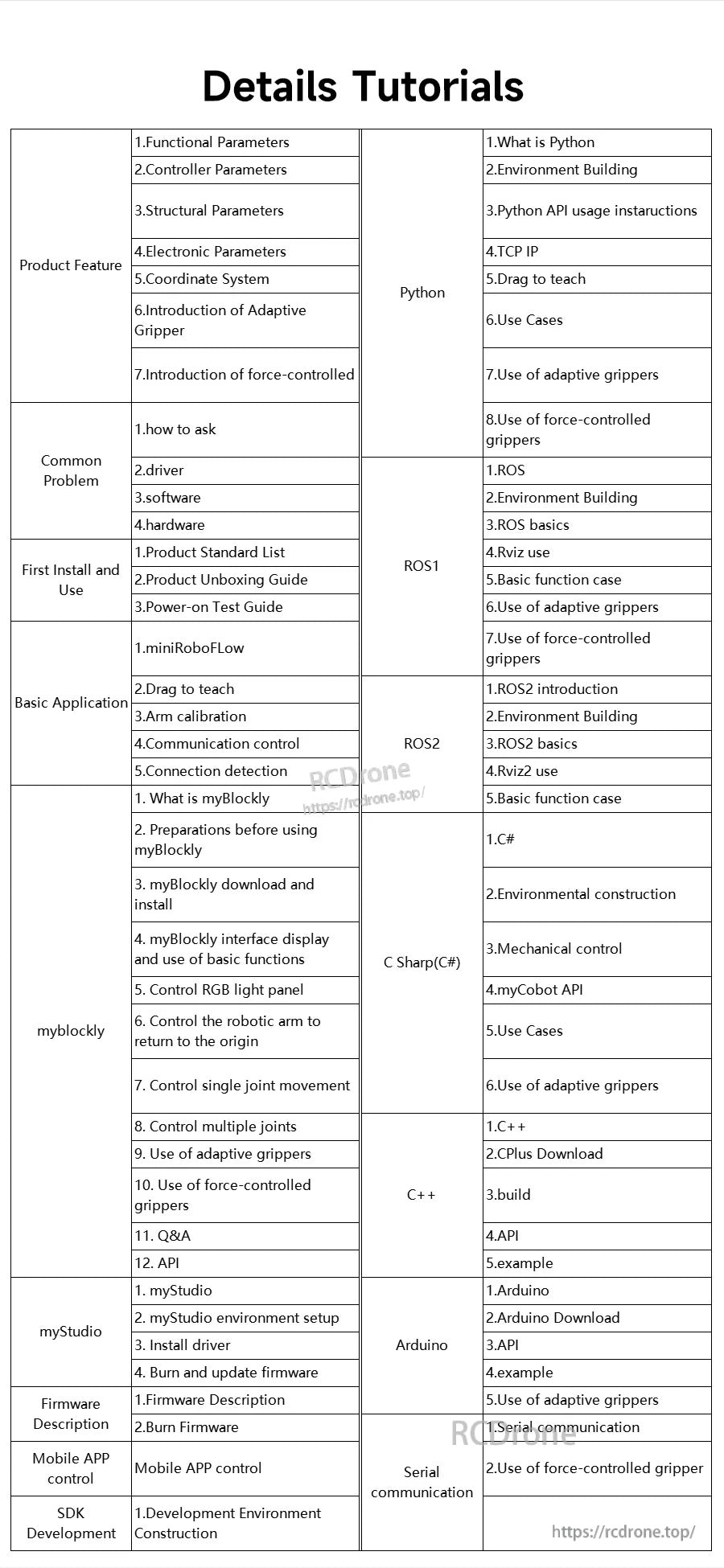
La documentación del myCobot 320 M5 proporciona enlaces a guías de configuración, calibración y programación para Python, ROS1/ROS2, C++ y Arduino.
La configuración del myCobot 320 está respaldada por materiales de tutorial descargables que cubren el uso básico más la programación en Python, ROS, C++, y control de aplicaciones.
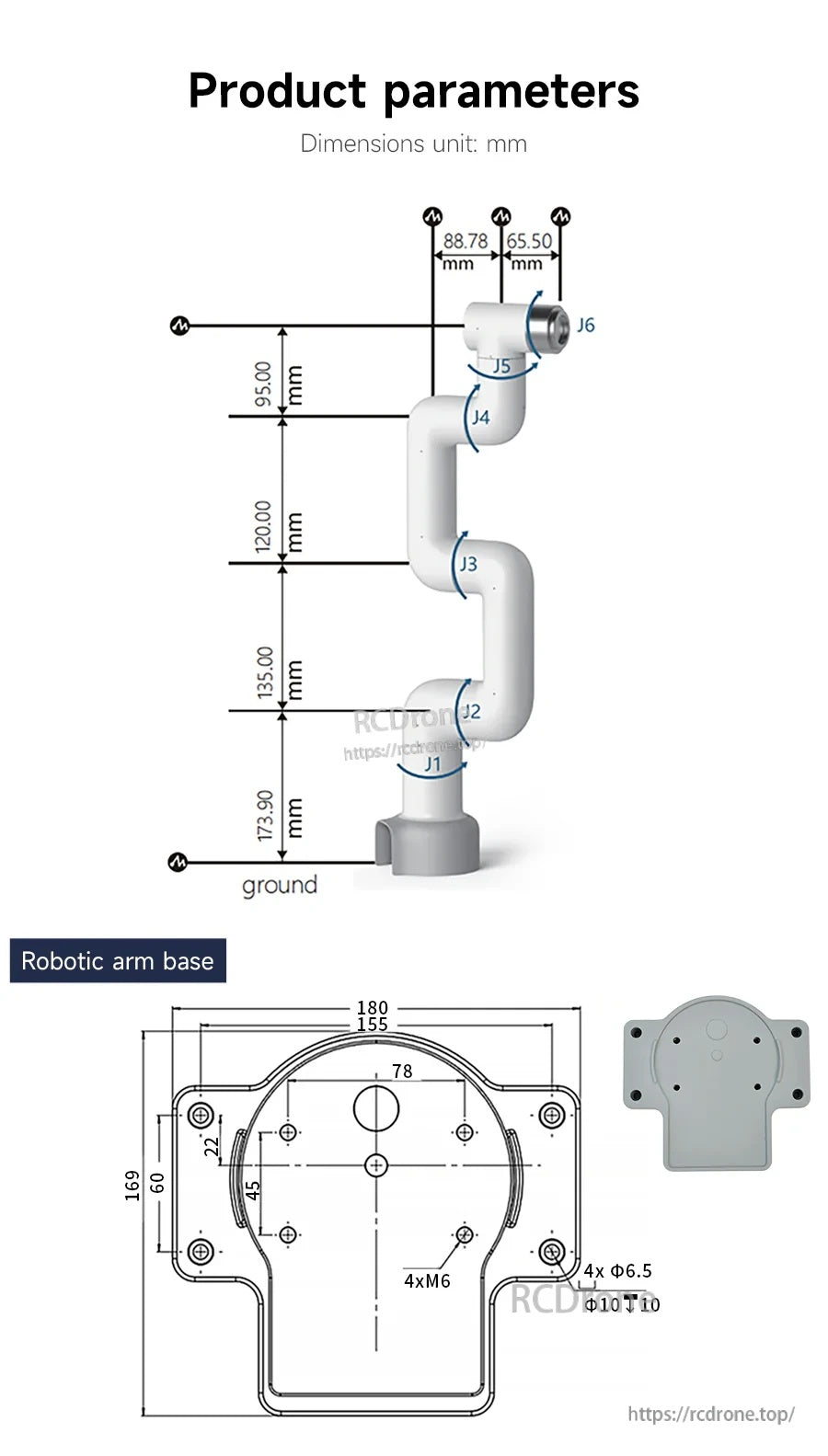
El myCobot 320 M5 incluye un diseño dimensional en milímetros y un patrón de montaje en la base con 4×M6 agujeros para la planificación de la instalación.
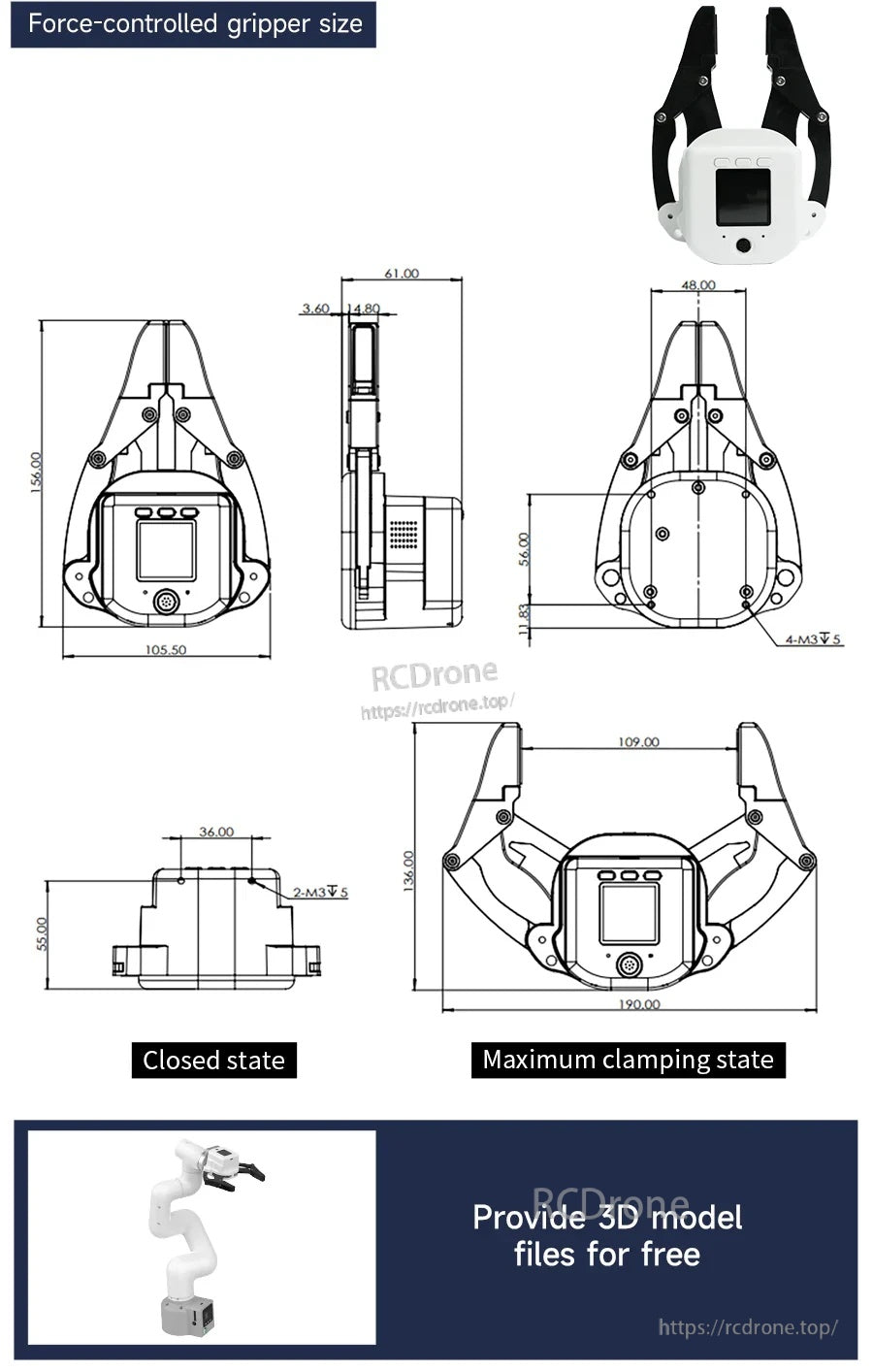
El gripper controlado por fuerza incluye dimensiones detalladas para el cuerpo y las posiciones de la mandíbula en estados cerrados y de máxima sujeción.
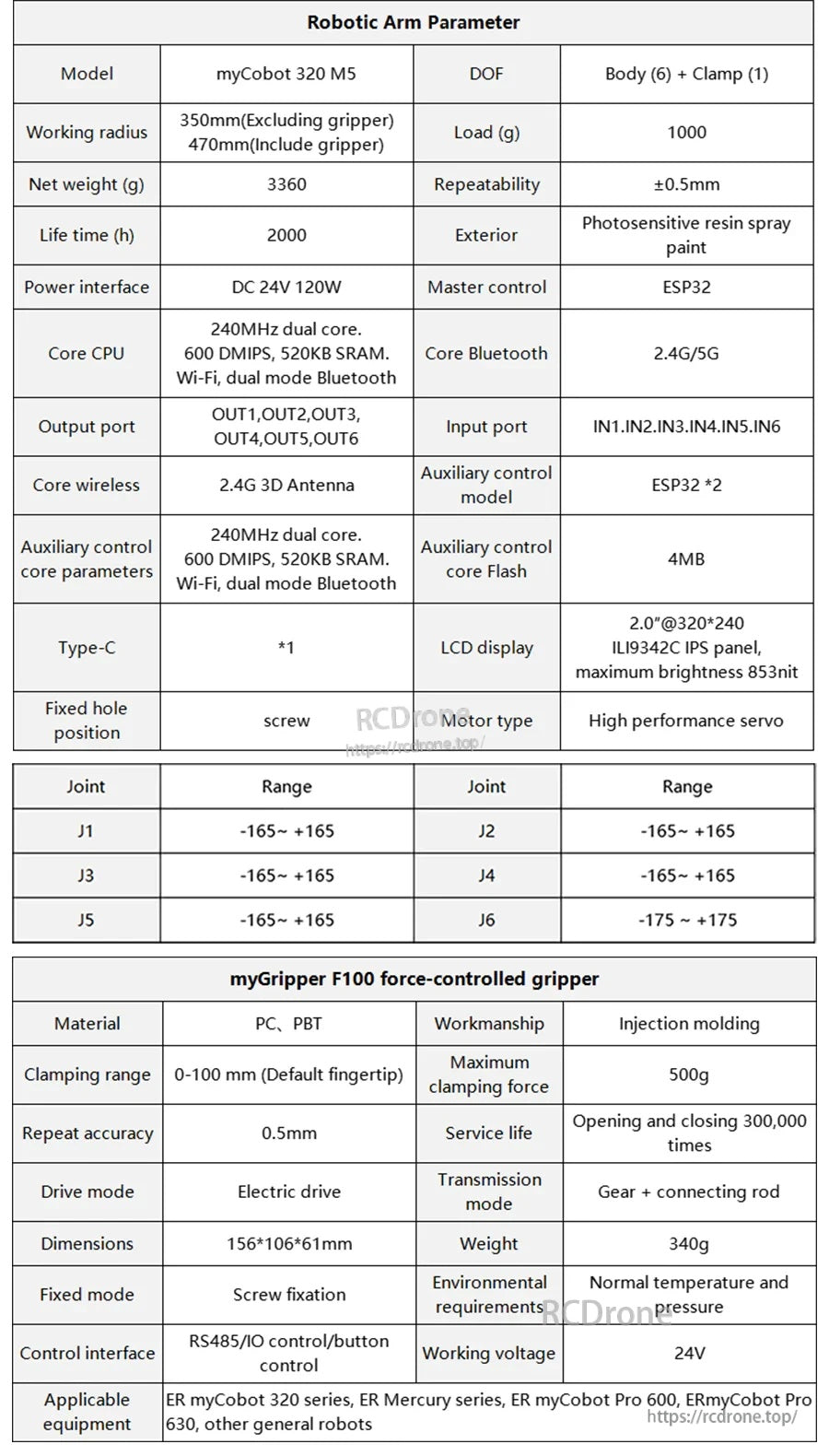
Las especificaciones del myCobot 320 M5 enumeran un radio de trabajo de 350 mm (470 mm con el gripper), una carga útil de 1 kg y una repetibilidad de ±0.5 mm para la planificación de la configuración.
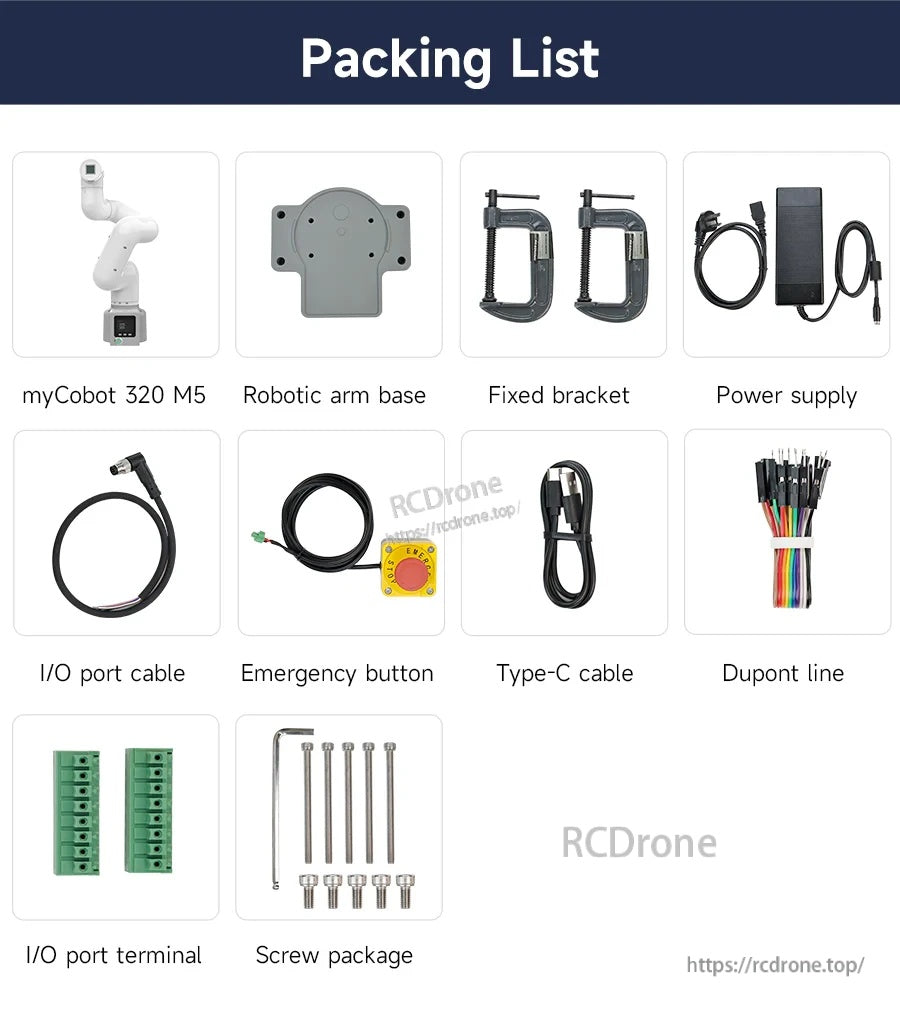
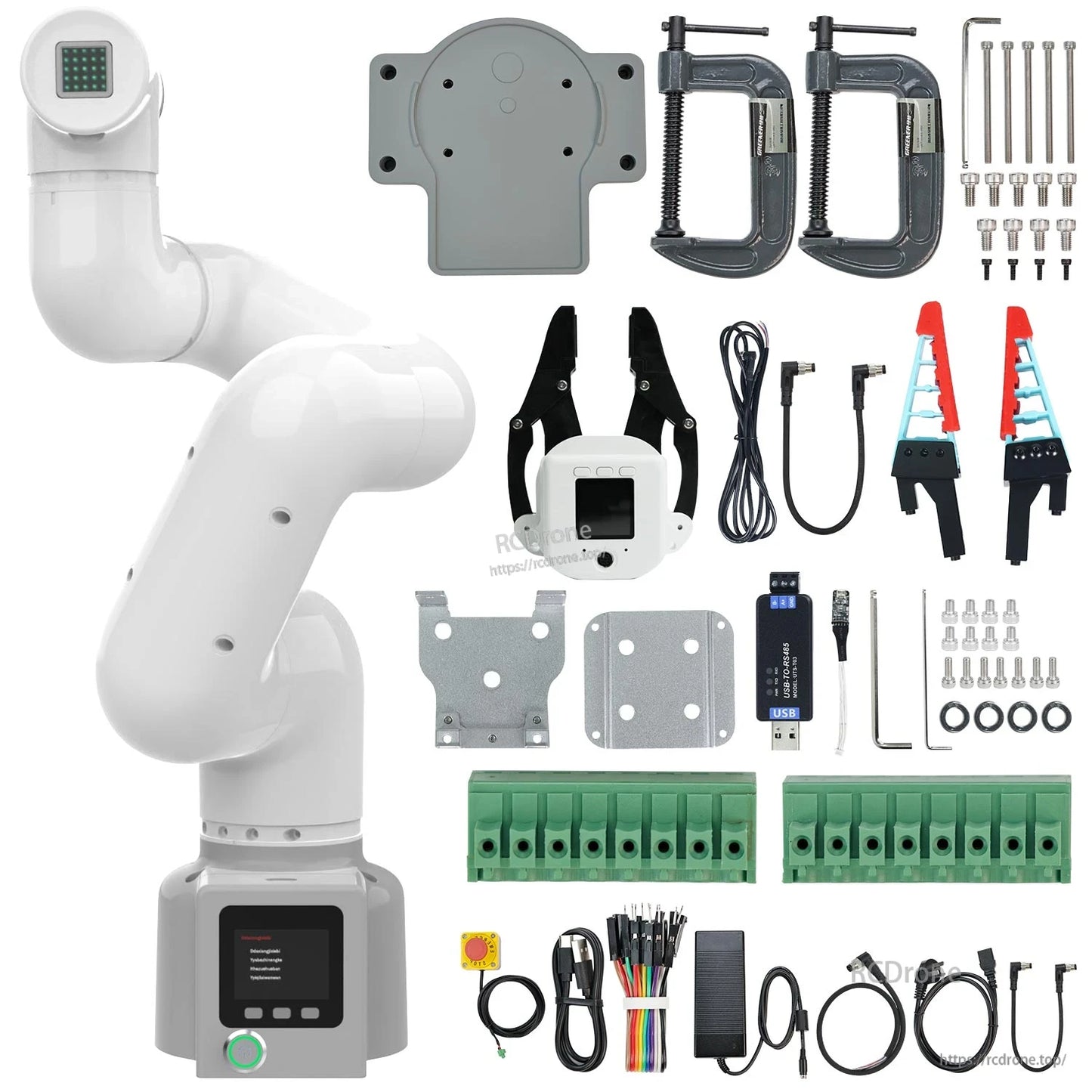
El kit myCobot 320 M5 incluye el brazo robótico, la base del brazo, soportes fijos, fuente de alimentación, cables USB-C y de E/S, botón de emergencia, terminales y tornillos de montaje.

El kit de gripper controlado por fuerza opcional incluye un gripper, cable de conexión, módulo RS485 a USB, soportes de montaje y hardware para la configuración.
Related Collections