





Mano robótica OYMotion ROH-AP001, 6 DOF, 11 articulaciones, sensores de fuerza, UART/RS485/CAN, control PID, 0,7 s
Mano robótica OYMotion ROH-AP001, 6 DOF, 11 articulaciones, sensores de fuerza, UART/RS485/CAN, control PID, 0,7 s
OYMotion
No se pudo cargar la disponibilidad de retiro
Descripción
La mano robótica OYMotion ROH-AP001 es una mano robótica con 11 articulaciones móviles y 6 controladores de motor integrados que proporcionan 6 grados de libertad activos. Un algoritmo de control de motor PID integrado permite un agarre y manipulación de objetos precisos y repetibles. Cada dedo integra un sensor de fuerza para el monitoreo en tiempo real y control en bucle cerrado de la fuerza de agarre. Las interfaces físicas incluyen UART, RS485 o CAN FD, con soporte para el protocolo serial SerialCtrl, ModBus-RTU y protocolo CAN. Se soportan plataformas ROS/ROS2 para desarrollo secundario a través de SDK (se requiere acuerdo de licencia).
Características Clave
- 6 DOF activos y 11 articulaciones; dedos motorizados de forma independiente para un agarre natural.
- Controladores de motor integrados y control PID; toda la actuación integrada en la mano.
- Sensores de fuerza en cada dedo con retroalimentación táctil y control de fuerza en tiempo real.
- Rotación del pulgar motorizada más diseño de dedos plegables.
- Operación de pantalla táctil soportada en las yemas de los dedos.
- Movimiento rápido: 0.7 s de flexión/extensión de rango completo y 0.7 s de rotación de rango completo del pulgar.
- Capacidad de carga: hasta 30 Kg de carga pasiva para cuatro dedos (doblados), 10 Kg por dedo (doblado), 8 Kg por dedo (estirado).
- Tamaño y proporciones similares a los humanos; almohadillas de dedos suaves y guante de silicona; diseño de muñeca personalizado; timbre de mensaje.
- Interfaces y protocolos: UART/RS485/CAN con SerialCtrl y ModBus-RTU; CAN a 1M baudios.
- Materiales evidenciados: aleación de aluminio, aleación de zinc, acero inoxidable, silicona, plástico.
Especificaciones
| DOF activo | 6 |
| Articulaciones móviles | 11 |
| Distancia vertical desde la punta del dedo medio hasta la muñeca | 183 mm |
| Distancia vertical desde la punta del pulgar hasta la muñeca | 95 mm |
| Longitud del pulgar | 111 mm |
| Ancho máximo de la palma | 82 mm |
| Diámetro de la muñeca | 49 mm |
| Ángulo máximo de apertura y cierre del lado del pulgar | 0~31 ° |
| Ángulo máximo de apertura y cierre del pulgar a la palma | 0~50 ° |
| Ángulo de rotación lateral del pulgar | 0~90 ° |
| Tiempo de flexión/extensión para todo el rango a máxima velocidad | 0.7 segundos |
| Tiempo de rotación del pulgar para el rango completo a máxima velocidad | 0.7 segundos |
| Fuerza activa de cada yema de los dedos en estado estirado | ≥0.5 Kgf |
| Fuerza activa de cada yema de los dedos en estado doblado | ≥1.0 Kgf |
| Fuerza activa máxima de la yema del pulgar | ≥1.0 Kgf |
| Carga pasiva máxima para cuatro dedos en estado doblado | 30 Kg |
| Carga pasiva máxima para cada dedo en estado doblado | 10 Kg |
| Carga pasiva máxima para cada dedo en estado estirado | 8 Kg |
| Función de pantalla táctil con el dedo | Compatible |
| Retroalimentación de fuerza del dedo | Compatible |
| Temperatura del entorno de trabajo | -10 °C ~ +40 °C |
| Humedad del entorno de trabajo | Humedad relativa máxima 85% |
| Vida útil de diseño | 3 años |
| Peso (incluyendo la muñeca) | 640 g ± 5 g |
| Interfaz de comunicación | UART/RS485/CAN |
| Velocidad de baudios | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protocolo soportado | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materiales | Aleación de aluminio; aleación de zinc; acero inoxidable; silicona; plástico |
Aplicaciones
- Efectores finales robóticos y robots humanoides.
- Equipo educativo y de investigación.
- Prótesis biónicas.
- Sistemas de automatización industrial y AGV.
Para asistencia en pedidos, orientación sobre integración o soporte técnico, por favor contacte [email protected] or visite https://rcdrone.top/.
Manuales
Detalles

El ROHand ofrece una precisión de posicionamiento de ±1mm a través de un control de motor PID incorporado y ofrece seis grados de libertad activos para simular los movimientos de la mano humana como pellizcar y agarrar. Ideal para robots humanoides, efectores finales robóticos, sistemas de inspección, prótesis biónicas inteligentes y aplicaciones educativas o de investigación, su diseño soporta una manipulación versátil y precisa en tareas complejas.
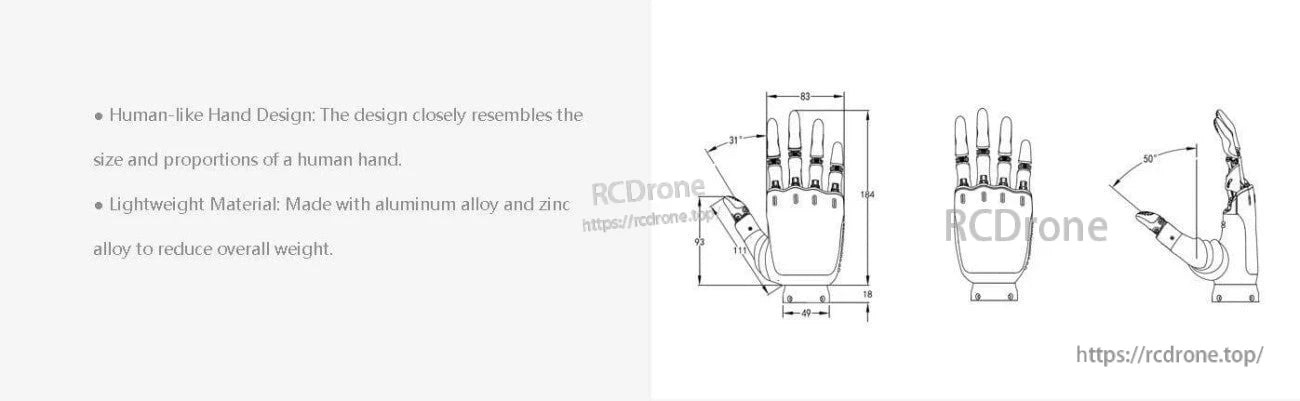
Mano robótica hábil y similar a la humana con construcción de aleación de aluminio y zinc ligera y dimensiones precisas.

La mano robótica hábil OYMotion ROH-AP001 imita las proporciones humanas, con dedos articulados y sensores para una manipulación robótica precisa y a tamaño real.
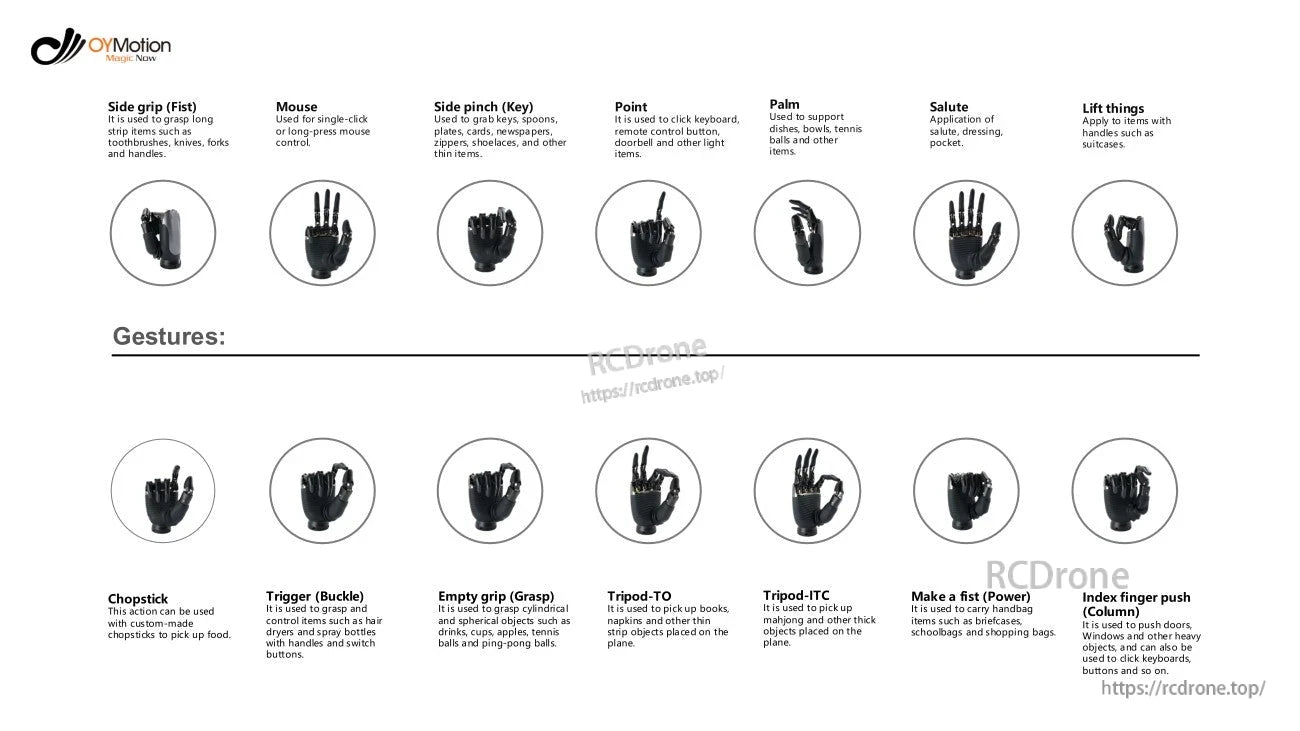
La mano robótica OYMotion realiza 14 gestos precisos—como agarrar, señalar y levantar—para manejar tareas diarias como usar palillos, llevar bolsas o hacer clic en teclados, mostrando una destreza avanzada y utilidad práctica.

La mano robótica OYMotion ofrece dedos motorizados, diseño plegable, almohadillas suaves, pulgar motorizado, guante de silicona, actuación incorporada, pitido, muñeca personalizada y conector RS485 para un agarre natural hábil.
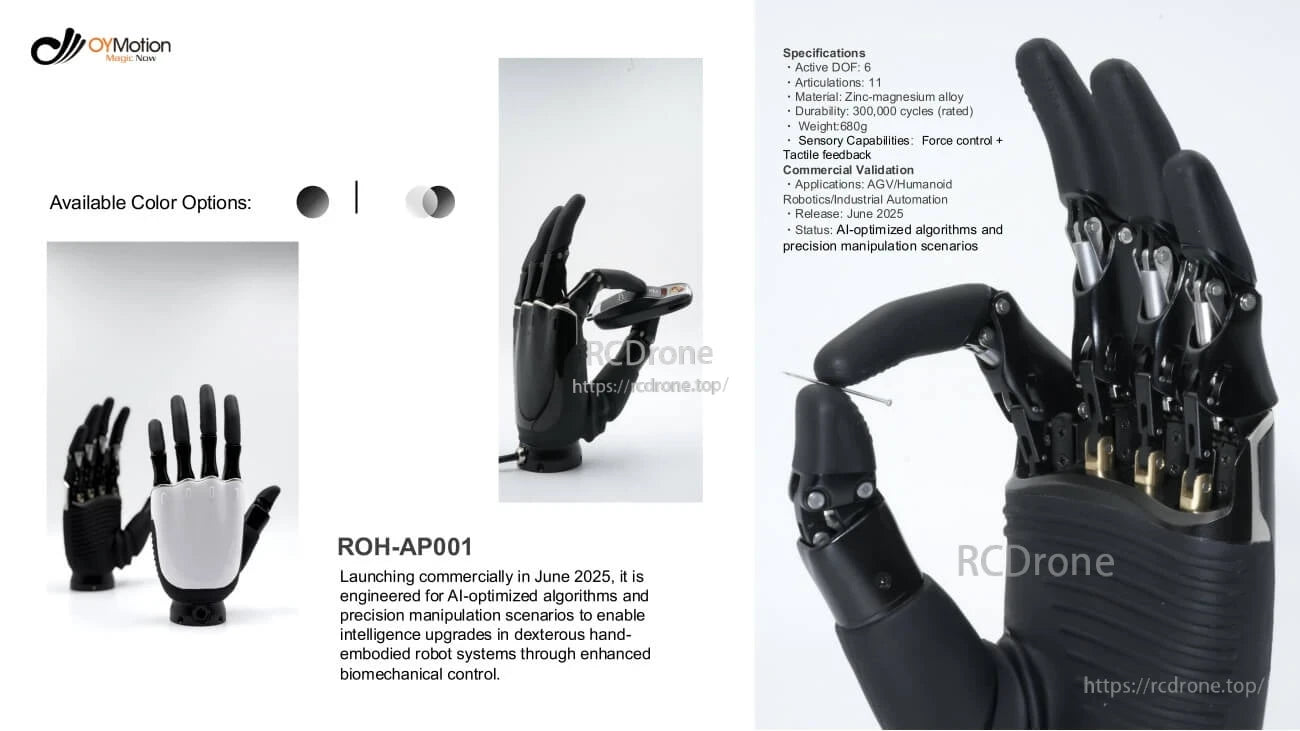
La mano robótica hábil OYMotion ROH-AP001 tiene 6 DOF activos, 11 articulaciones, una construcción de aleación de zinc y magnesio, durabilidad de 300k ciclos, pesa 680g y ofrece retroalimentación de fuerza/táctil para tareas de IA y precisión—lanzamiento en junio de 2025.

La mano robótica OYMotion ROH-AP001 tiene dedos motorizados, un pulgar motorizado, guante de silicona y actuador incorporado. Construida de aluminio, zinc, acero, silicona y plástico, incluye un beeper, muñeca personalizada, protocolo RS485, diseño plegable y resortes de presión.
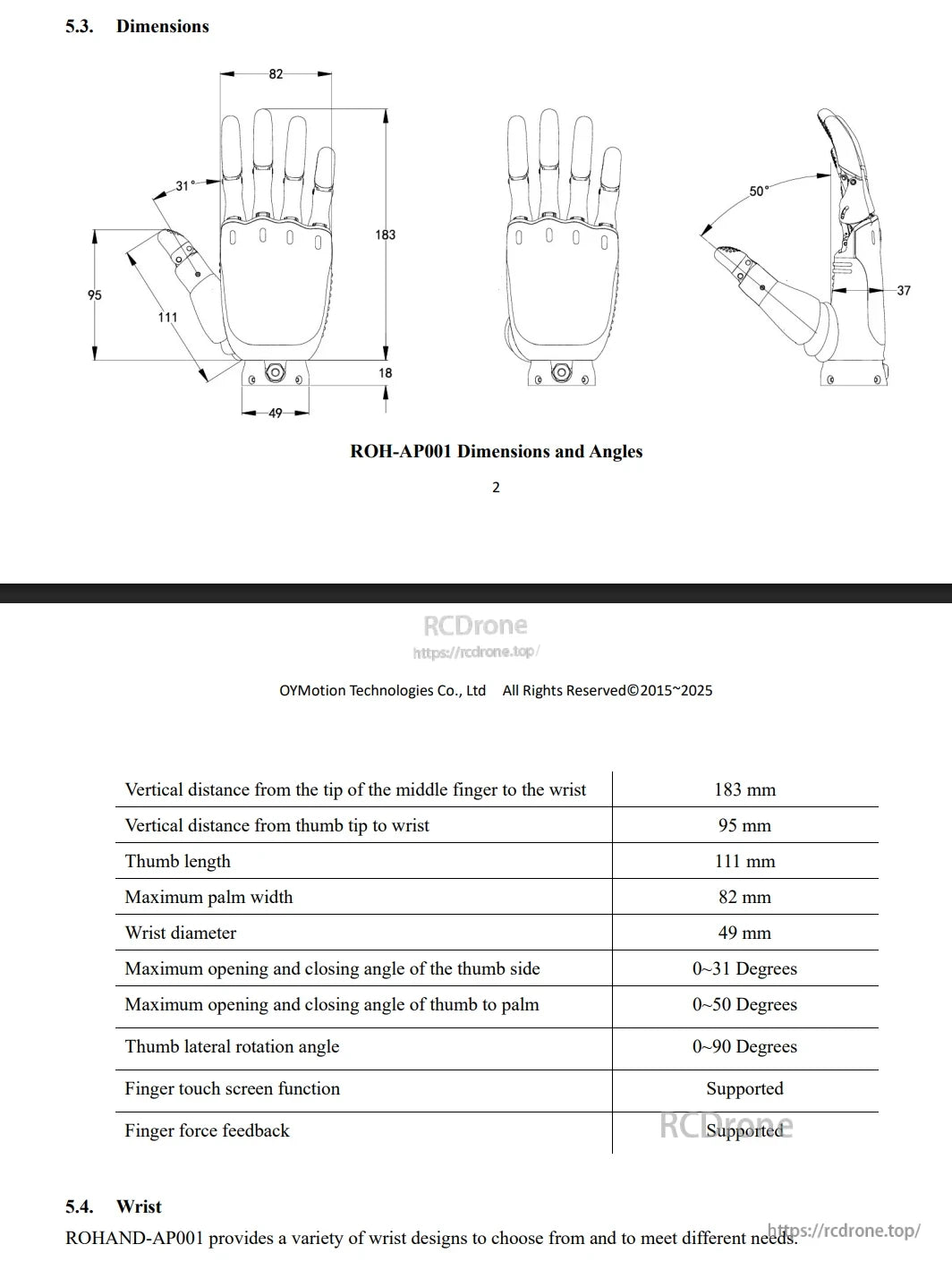
Las dimensiones de la mano robótica ROH-AP001 incluyen una altura de 183 mm desde el dedo hasta la muñeca, 95 mm desde el pulgar hasta la muñeca, 111 mm de longitud del pulgar, 82 mm de ancho de la palma, 49 mm de diámetro de la muñeca. Ángulos del pulgar: 0-31° lateral, 0-50° hacia la palma, 0-90° de rotación. Soporta pantalla táctil y retroalimentación de fuerza.
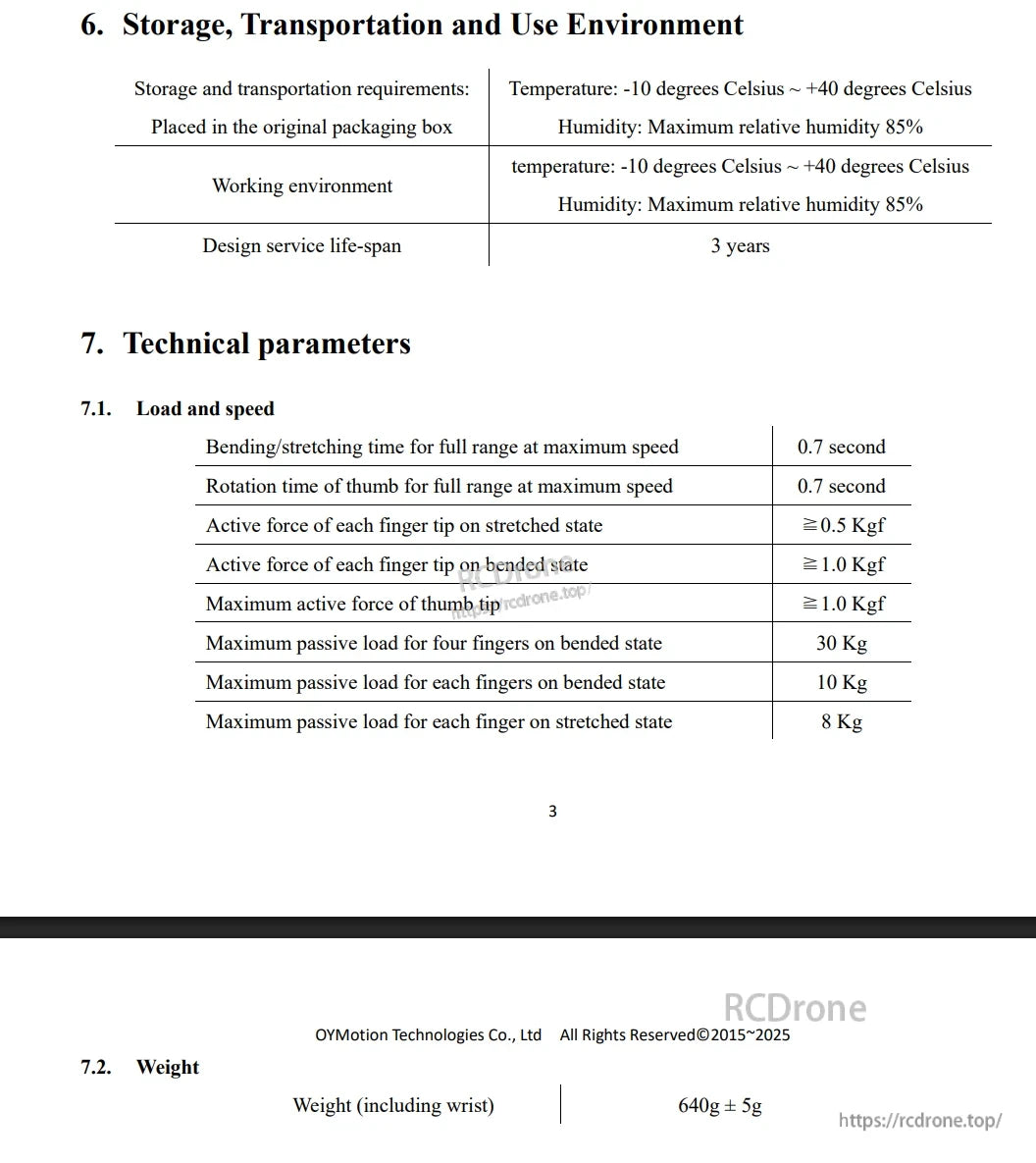
La mano robótica OYMotion ROH-AP001 opera entre -10°C y +40°C, con un 85% de humedad máxima. Vida útil del diseño: 3 años. Peso: 640g ±5g. Fuerza activa del dedo ≥0.5–1.0 Kgf; carga pasiva de hasta 30 kg para cuatro dedos.
Related Collections





