ESPECIFICACIONES del controlador de vuelo Pixhawk 2.4.8 PX4 PIX de 32 bits
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Marco
Suministros de herramientas: Esmerilado
Parámetros técnicos: Valor 3
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 12+años, 14+años
Piezas y accesorios de RC: Controladores de velocidad
Origen: China continental
Número de modelo: Pixhawk 2.4.8
Material: Metal
Atributos de tracción en las cuatro ruedas: Motores
Para tipo de vehículo: Aviones
Nombre de marca: Readytosky
ReadyToSky es un proveedor profesional de accesorios para módulos FPV RC. Si está interesado en obtener más información sobre las opciones de compra al por mayor o al por mayor, no dude en comunicarse con nosotros.
Características:
Pixhawk 2.4.8 admite el último firmware oficial de ardupilot y PX4.
1. Los procesadores avanzados de alto rendimiento ARM CortexM4 de 32 bits (flash de 2 MB) pueden ejecutar el sistema operativo NuttX RTOS en tiempo real;
2. 14 salidas PWM/servo;
3. Interfaz de bus (UART, I2C, SPI, CAN);
4. La alimentación de respaldo integrada y el controlador de respaldo fallan, el controlador primario conmuta por error al control de respaldo es seguro;
5. Proporcionar modos automático y manual;
6. Proporcionar entrada de energía redundante y conmutación por error;
7. Luces LED multicolores;
8. Proporciona interfaz de zumbador multitono
9. Grabación de datos de vuelo en Micro SD;
Especificaciones:
Interfaz
1 .5 UART 1, 2 compatible con alto voltaje con control de flujo de hardware
2. 2 PUEDE
3. Entrada compatible con receptor de satélite Spektrum DSM / DSM2 / DSM-X
4.Entradas y salidas compatibles con Futaba SBUS
Entrada de señal de 5.PPM
6.Entrada RSSI (PWM o voltaje)
7.I2C
8.SPI
Entrada de 9.3.3 y 6.6VACC
10. Interfaz MICRO USB externa
Pantalla OLED OSD Pixhawk para Pixhawk 2.4.8 PIX PX4 Control de vuelo Pantalla de vuelo Estado del vuelo conectado a la interfaz I2C
Es adecuado para el control de vuelo de Pixhawk, etc. y se utiliza para mostrar la información de estado de la aeronave. Este módulo está conectado a la interfaz I2C de Pixhawk
Nota: Para actualizar el firmware de la pantalla a 3.5 o más, configure NTF_DISPLAY_TYPE en 1 en Massion Planner y reinicie Pixhawk.
¿CÓMO utilizar el módulo WIFI para PIXHAWK?
1.¿Cómo conectarse?
use la línea 6P que se conecta al controlador de vuelo pixhawk.
Debido a los diferentes firmware, algunos firmware pueden usar dos puertos, algunos firmware solo pueden usar uno de los puertos. Así que busque uno de los puertos disponibles para la conexión.
SI usa el firmware PX4, solo se puede usar TELEM1, no se puede usar TELEM2.
Para el firmware Ardupilot, se recomienda utilizar el puerto TELEM2. O busque uno de los puertos disponibles para la conexión.
Para firmware PX4, debe usar el puerto TELEM1.
2.¿Cómo utilizar?
Tenga en cuenta: cuando se utiliza la conexión de telemetría de radio Wifi, debe usar el módulo de alimentación 3DR o ESC de 5 V para suministrar energía al control de vuelo. No se puede insertar el USB porque la prioridad del USB es mayor que la radiotelemetría. Si el cable USB está enchufado, no se puede utilizar para la transmisión de radiotelemetría.
El nombre del punto de acceso wifi es Drone, así que use un teléfono o una computadora para conectarse a este punto de acceso, la contraseña es 12345678.
Nota: Algunos dispositivos (por ejemplo, algunos sistemas iPhone IOS) no pueden obtener IP automáticamente, debe configurarlo en manual.
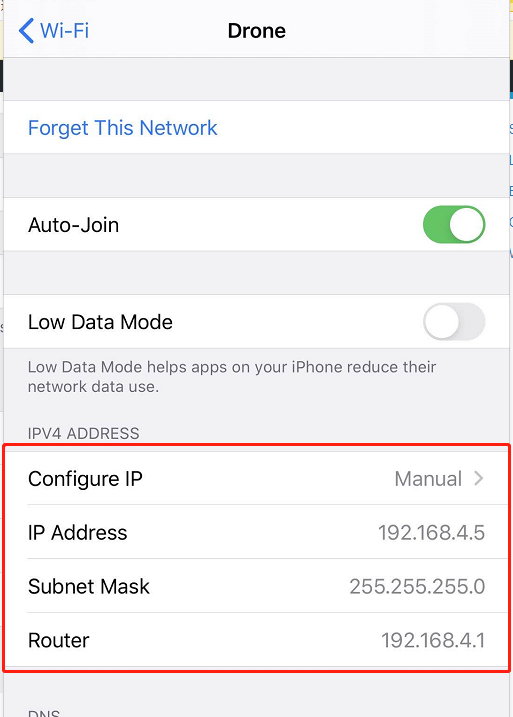
Establezca Configurar IP como manual. Configure la dirección IP como "192.168.4.5" u otra, pero no puede configurarla como "192.168.4.1", el último número no puede exceder 254. Configure la máscara de subred como "255.255.255.0" (debe establecer este valor, no puede otro). Configure el enrutador como “192.168.4.1” (debe establecer este valor, no puede otro)
Cuando su dispositivo se conecta exitosamente a este punto de acceso, puede usar el navegador para visitar http://192.168.4.1 , puede modificar el parámetro.
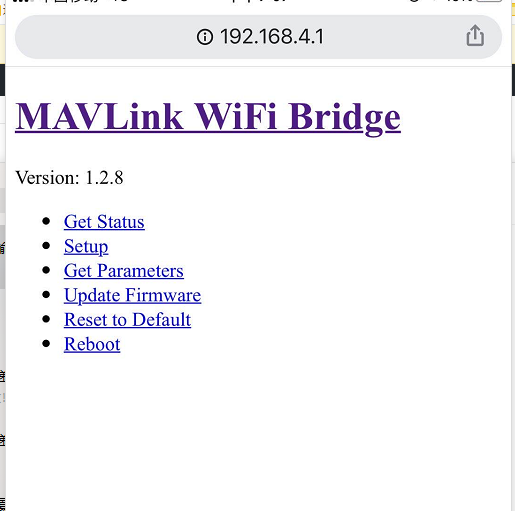
Tenga en cuenta que el botón es un botón de reinicio, no un botón de reinicio. Cuando presione el botón, todos los parámetros se establecerán en los valores predeterminados si modifica algún parámetro.
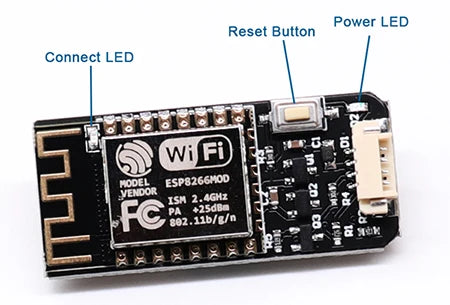
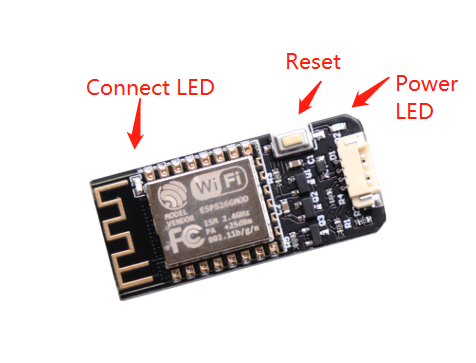
LED de encendido: cuando se enciende, el LED rojo está encendido.
LED de conexión: cuando se conecta correctamente con el control terrestre (por ejemplo, Mission Planner o Qgroundcontrol), el LED azul parpadea. cuando se desconecta con el control de tierra, el LED azul está encendido.
1.¿Cómo utilizarlo para el planificador de misiones?
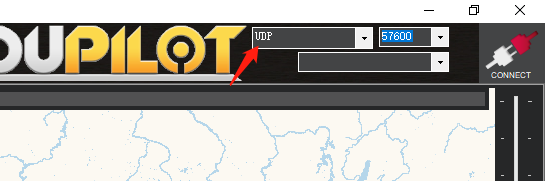
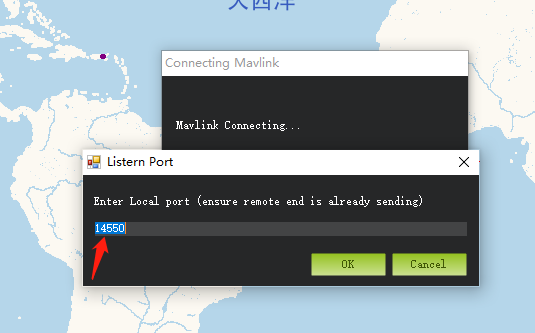
En primer lugar, conecte su PC al punto de acceso Drone con éxito. Seleccione UDP. Luego haga clic en el botón "Conectar", use el puerto 14550. Haga clic en "Aceptar". No es necesario elegir la velocidad en baudios. La velocidad en baudios predeterminada del módulo wifi es 57600. Pero 115200 u otra también puede funcionar.
2.Cómo utilizar para teléfono
Para Android: descargue qgroundcontrol (solo para pixhawk, no para APM)
desde aquí,http://qgroundcontrol.com/downloads/
Descarga DroidPlanner desde aquí,https://github.com/DroidPlanner/Tower/releases
Para iPhone (IOS): busque qgroundcontrol en la tienda de aplicaciones.
qgroundcontrol(solo para pixhawk, no para APM) se puede conectar automáticamente, DroidPlanner debe elegir el puerto "UDP" y "14550" antes de conectarse a groundcontrol.
WIFI V3.0 utiliza CPU de 32 bits, admite TCP y UDP
Sitio web de WIFI V3.0 DroneBridge
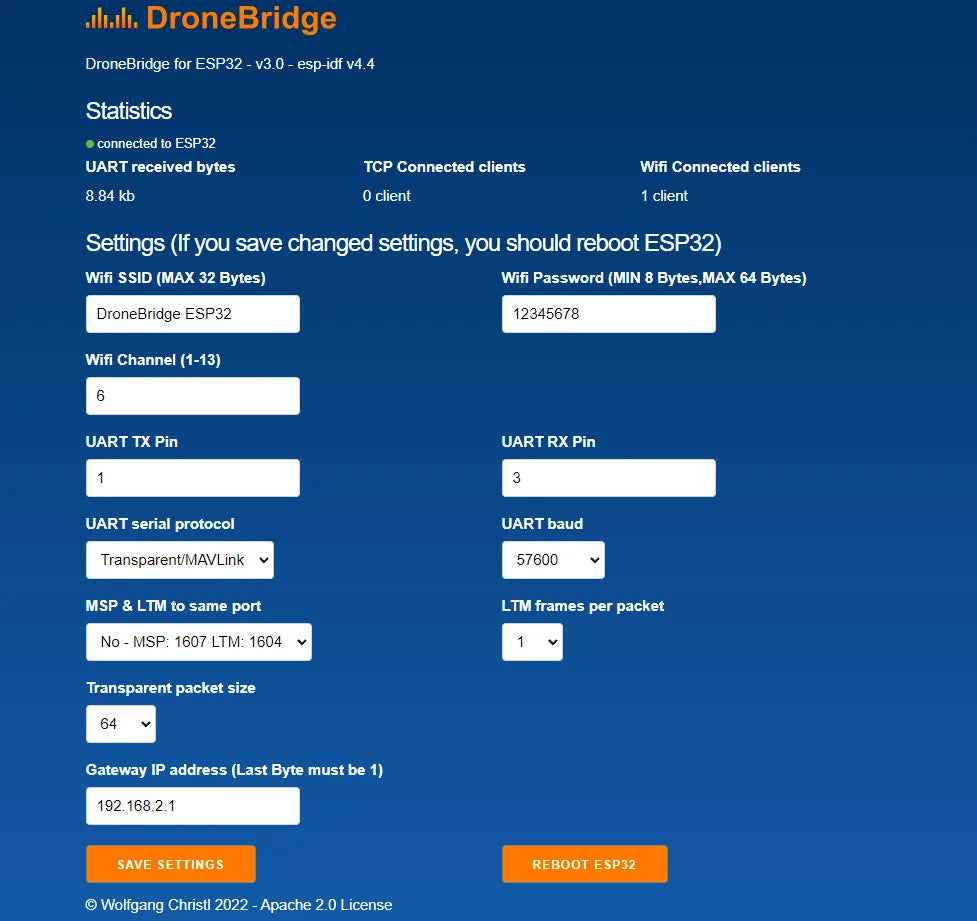
ulul; DroneBridge para ESP32 v3.0 esp idf v4.4 Estadística conectada a ESP 32 UART bytes recibidos TCP Clientes conectados Contraseña Wifi (MIN 8 Bytes, MAX 64 Bytes) si guarda la configuración modificada, debe reiniciar ESP33.
(envíalo según tu elección)

Pixhawk 2.4.8 FC + Tarjeta 4G TF + MBN GPS Soporte GPS + OSD + Módulo de alimentación Amortiguador I2C PPM RGB Botón de seguridad Zumbador Wifi Telemtry Cables Ontk 'Módulo GPs PPM 1'

El paquete incluye: Pixhawk 2.4.8 controlador de vuelo, una tarjeta 4G TF, amortiguador, módulo I2C, módulo PPM, módulo RGB, pantalla OLED, botón de seguridad con timbre y cables para todos los componentes.
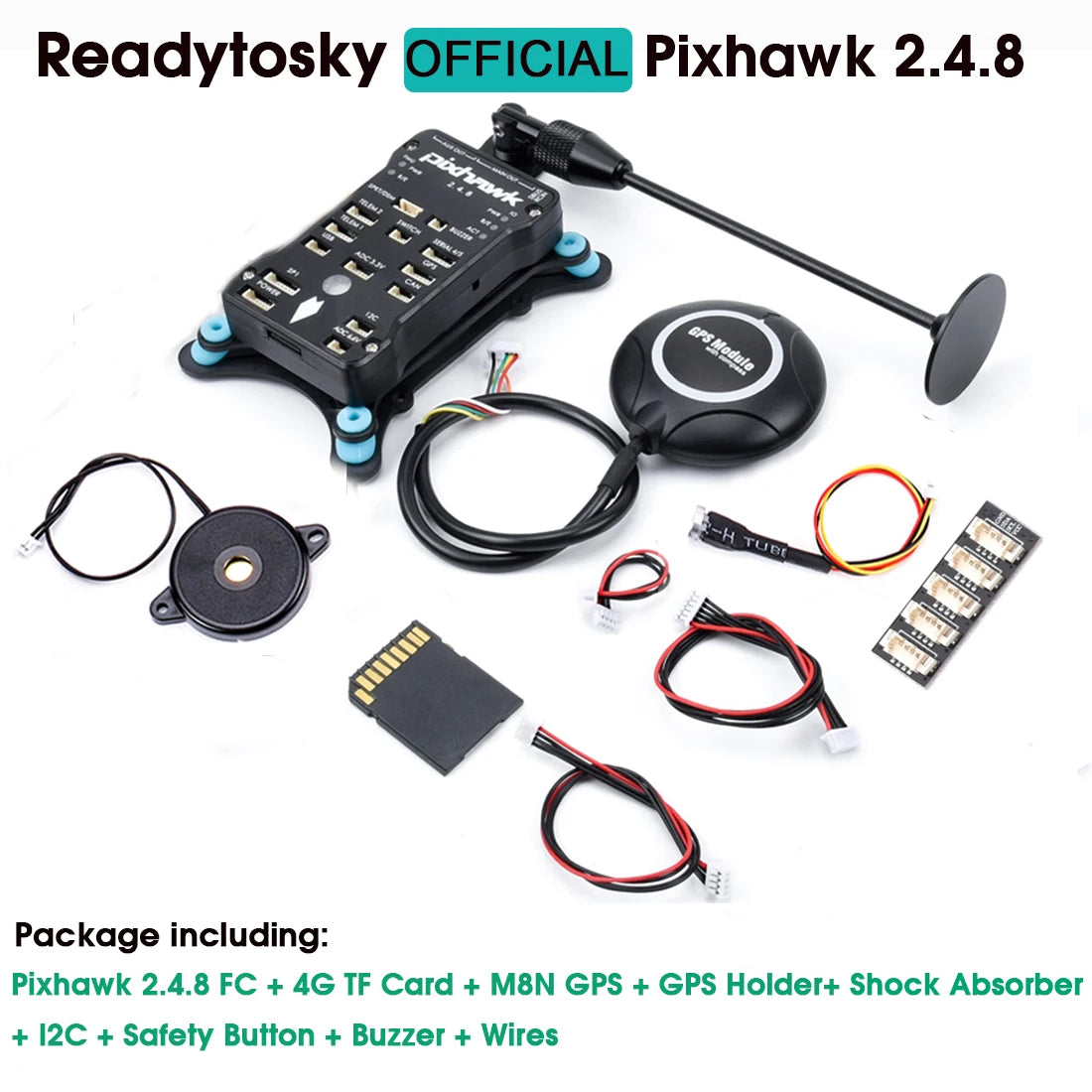
El paquete incluye: Pixhawk 2.4. 8, una tarjeta 4G TF, módulo GPS MBN, soporte para GPS, amortiguador, botón de seguridad I2C, cables de timbre y un módulo de telemetría opcional para transmisión inalámbrica de datos.

El paquete incluye: Pixhawk Controlador de vuelo 2.4.8, tarjeta 4G TF, amortiguador, pantalla OLED, módulo I²C, módulo PPM (modulación de posición de pulso), botón de seguridad con timbre y cables.

Este vuelo Pixhawk 2.4.8 El controlador viene con una tarjeta 4G TF, botón de seguridad, zumbador y cables para salidas auxiliares. También cuenta con un módulo TELEM con dos entradas de alimentación, un puerto serie y canales ADC (convertidor analógico a digital). Además, tiene capacidades de GPS y requiere energía para funcionar.

Se necesita calibración de VCC, GPS y tarjeta SD en el modo 'Estabilizado' con un voltaje de batería de 11,32 V. Además, no hay datos de GPS disponibles. Se ha archivado el prearmado y EKF (filtro Kalman extendido) está habilitado.