Pixhawk PX4 piloto automático PIX 2.4.8 Control de vuelo de 32 bits-con interruptor de seguridad PX4FMU PX4IO zumbador 4G SD para DIY RC Drone Multirotor
Pixhawk PX4 piloto automático PIX 2.4.8 Control de vuelo de 32 bits-con interruptor de seguridad PX4FMU PX4IO zumbador 4G SD para DIY RC Drone Multirotor
RCDrone
No se pudo cargar la disponibilidad de retiro
Piloto automático Pixhawk PX4 PIX 2.4.8 Control de vuelo de 32 bits ESPECIFICACIONES
Comunicación inalámbrica: Control por cable
Usar: Universal
Origen: China continental

- La placa se integra con PX4FMU+PX4IO
- Pixhawk tiene nueva tecnología de sensor y chip de 32 bits
Características:
- Procesador avanzado CortexM4 ARM de 32 bits de alto rendimiento, puede ejecutar RTOS NuttX sistema operativo en tiempo real;
- 14* PWM/salida del actuador;
- Interfaz de bus (UART, I2C, SPI, CAN);
- Fuente de alimentación de respaldo integrada y controlador de respaldo de fallas, el controlador principal puede ser conmutado de forma segura al control de respaldo;
- Proporciona modo automático y manual;
- Proporciona entrada de energía redundante y función de transferencia de fallas;
- Lámpara LED de color;
- Interfaz de zumbador multitono;
- Micro SD para registrar datos de vuelo;
Procesador:
- Memoria flash de 32 bits y 2 M STM32F427 Cortex M4, con unidad de procesamiento de punto flotante de hardware
- Frecuencia principal: 256 K, 168 MHZ RAM
- 32 bit STM32F103 coprocesador de respaldo
Sensor:
- Giroscopio digital de 16 bits L3GD20 de 3 ejes
- Acelerómetro/magnetómetro LSM303D de 3 ejes y 14 bits
- Acelerómetro/magnetómetro MPU6000 de 6 ejes
- Barómetro de alta precisión MS5611
Interfaz:
- 5* UART, 1*alto voltaje compatible, 2*control de flujo de hardware
- 2* CAN
- Satélite DSM/DSM2/DSM-X entrada compatible con receptor
- Entrada y salida compatible con Futaba SBUS
- Entrada de señal PPM
- Entrada RSSI (PWM o voltaje)
- I2C
- SPI
- Entrada de 3,3 y 6,6 VACC
- Interfaz MICRO USB externa
El paquete incluye:
1 control principal Pixhawk 2.4.8
1 x carcasa de control de vuelo
1 x interruptor de seguridad
1 x zumbador
1 línea de 6 pines a 6 pines
1 línea de 4 pines a 4 pines
1 línea DuPont de 3 pines
1 tarjeta SD 4G


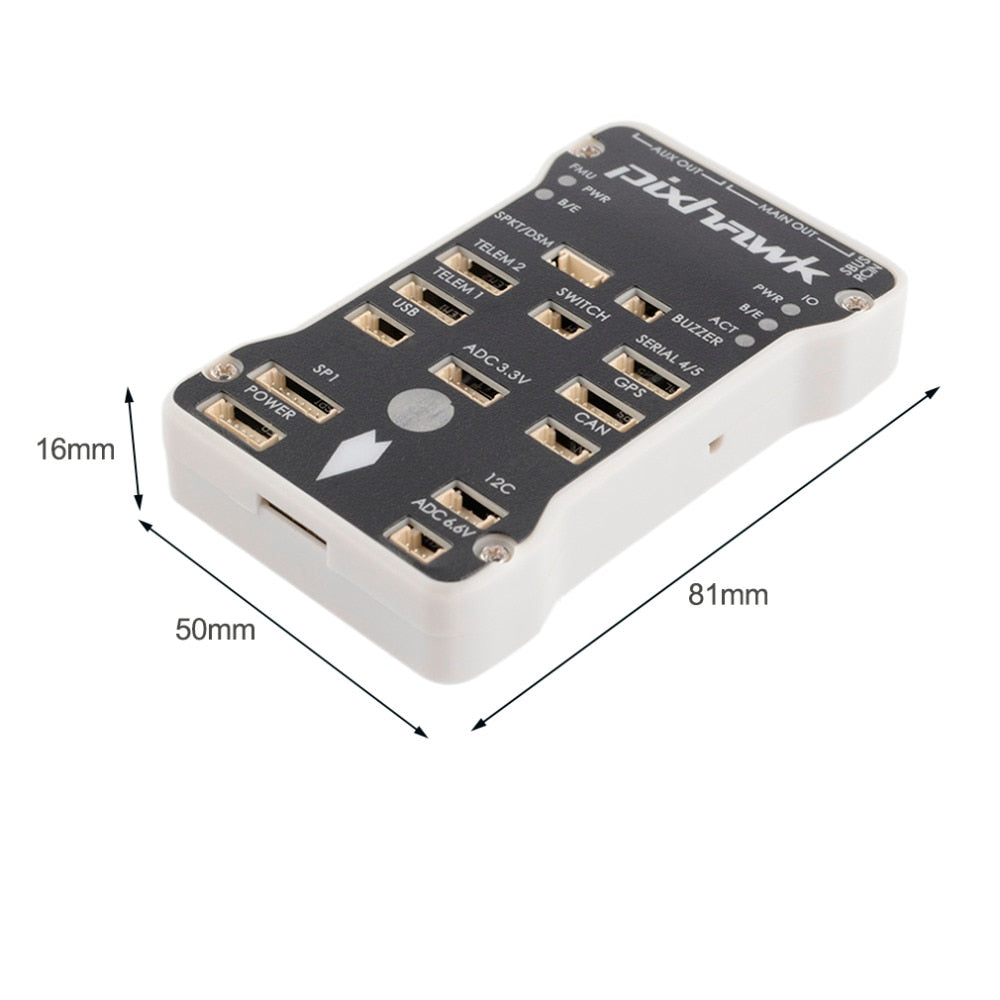
Gps CwN Mou AAut pidunwk a J SKd Jeltm > switch telu HTELLM Uso AdcJ Jv Tower migce Adgody Adapter .


Sistema de piloto automático Pixhawk PX4 para DIY RC Drone Multirotor con control de vuelo de 2,4 GHz, incluye zumbador de interruptor de seguridad PX4FMU y PX4IO, compatible con tarjeta SD 4G.

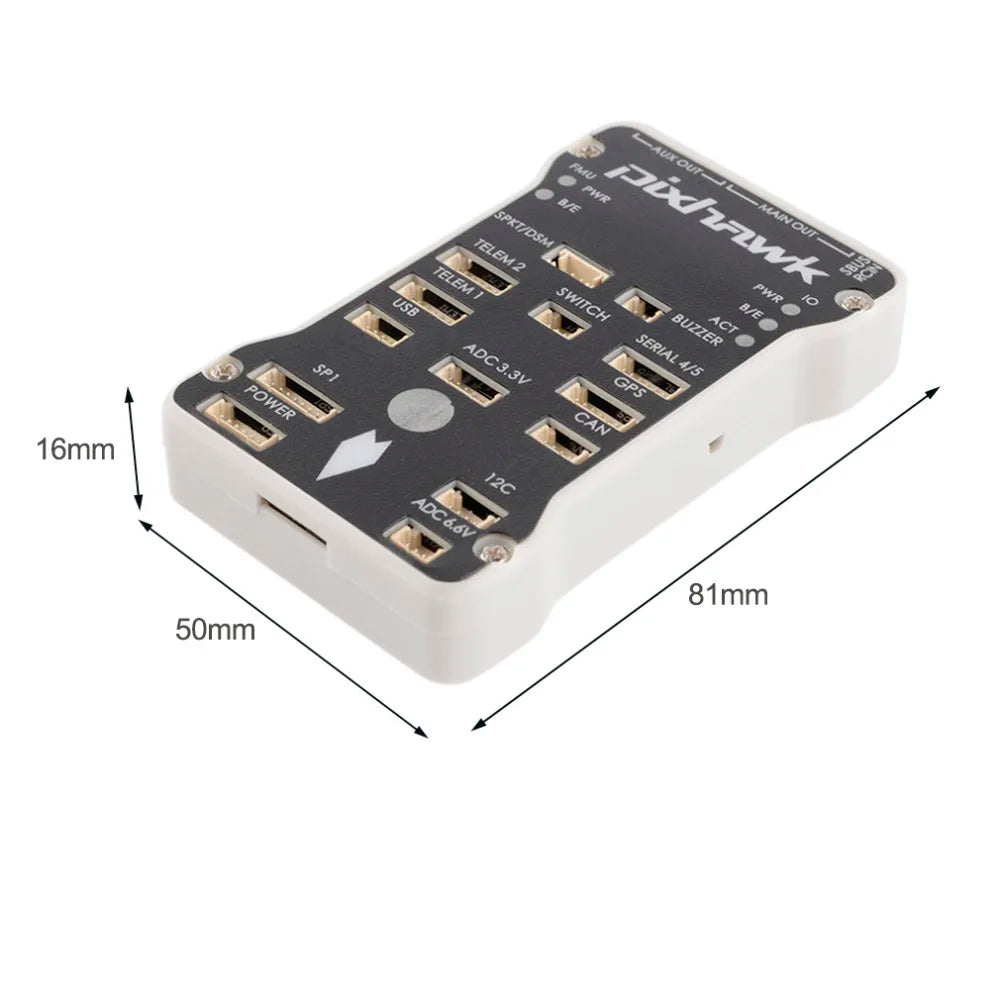

Auxout MANOUT pixdnewk FMU PWR Pwr B/E Bie ACI SPKT/DSM ZUMBADOR TELEM 2 Switch SERIAL 4/5TELEM 1 GPS USB ADC3.Jv CAN 'Sw SPI 12C POWER ADC 66v KG UNIDAD TARA ONIOFF CAPACiTTsooOGXI G Idepv 4oo
Related Collections