Nota:
PIXHAWK 2.4.8 es compatible con el último firmware ardupilot FMUV3 y PX4.
1. Puede seleccionar la carcasa blanca o negra del controlador de vuelo PIXHAWK, el hardware es el mismo. La carcasa blanca es más bonita. Si necesita una carcasa blanca, deje un mensaje.
2.Si el paquete tiene Módulo de alimentación 3DR, de forma predeterminada enviaremos el módulo de alimentación 3DR con enchufe XT60, si lo necesita, deje un mensaje.
3. Pixhawk tiene muchos paquetes. Le enviaremos el paquete que seleccione.
Controlador de vuelo Pixhawk PX4 Autopilot PIX 2.4.8 de 32 bits
Características:
Pixhawk 2.4.8 admite el último firmware oficial de Arduinopilot y el firmware PX4.
1. Los procesadores avanzados de alto rendimiento ARM CortexM4 de 32 bits (flash de 2 MB) pueden ejecutar el sistema operativo en tiempo real NuttX RTOS;
2. 14 salida PWM / servo;
3. Interfaz de bus (UART, I2C, SPI, CAN);
4. Si falla la fuente de alimentación de respaldo integrada y el controlador de respaldo, el controlador principal cambia al control de respaldo de manera segura;
5. Proporcionar modos automáticos y manuales;
6. Proporcionar entrada de energía redundante y conmutación por error;
7. Luces LED multicolores;
8. Proporcionar una interfaz de timbre multitono
9. Grabación de datos de vuelo en Micro SD;
Presupuesto:
Interfaz
1.5 UART 1, 2 compatible con alto voltaje con control de flujo de hardware
2. 2 PUEDE
3. Entrada compatible con receptor de satélite Spektrum DSM/DSM2/DSM-X
4.Entradas y salidas compatibles con Futaba SBUS
Entrada de señal 5.PPM
6. Entrada RSSI (PWM o voltaje)
7.I2C
8.SPI
Entrada de 9.3.3 y 6.6 V CC
10.Interfaz MICRO USB externa
Módulo GPS M9N
M9N es un módulo GPS comúnmente utilizado en vehículos aéreos no tripulados, con las siguientes características y aplicaciones:
Posicionamiento de alta precisión: el M9N adopta tecnología GNSS avanzada, es compatible con múltiples sistemas de navegación por satélite y puede proporcionar información de posicionamiento de alta precisión. Para vehículos aéreos no tripulados, puede lograr un posicionamiento y una navegación precisos.
Compatibilidad con múltiples sistemas: el M9N admite múltiples sistemas de navegación por satélite, incluidos GPS, GLONASS, Galileo, BeiDou, etc. Esto permite que los drones reciban múltiples señales de satélite simultáneamente, lo que mejora la precisión y la confiabilidad del posicionamiento.
Posicionamiento rápido: M9N tiene tiempos rápidos de arranque en frío y arranque en caliente, lo que puede obtener rápidamente señales de satélite y realizar el posicionamiento, lo que lo hace crucial para el despegue rápido y la ejecución de tareas de vehículos aéreos no tripulados.
Fuerte capacidad antiinterferencia: M9N tiene un excelente rendimiento antiinterferencia, que puede funcionar de manera estable en entornos electromagnéticos complejos y no es susceptible a la interferencia de otros dispositivos electrónicos.
En aplicaciones de drones, M9N se puede utilizar en los siguientes aspectos:
Posicionamiento y navegación: El M9N proporciona información precisa sobre posición y velocidad para ayudar a los drones a lograr una navegación y un control de vuelo precisos.
Navegación por puntos de referencia: al ingresar información de puntos de referencia preestablecida en M9N, los vehículos aéreos no tripulados pueden volar automáticamente de acuerdo con la ruta, logrando tareas de navegación de puntos de referencia autónomas.
Colaboración entre múltiples aeronaves: varios drones pueden usar el módulo M9N para posicionamiento y sincronización para lograr aplicaciones como vuelo colaborativo en equipo y vuelo en formación.
Regreso al retorno: el M9N puede proporcionar información precisa sobre el posicionamiento del retorno, lo que permite que el dron regrese de manera segura al punto de despegue o al punto de retorno preestablecido.
M9N puede buscar más satélites al aire libre con mayor precisión, mayor velocidad de búsqueda y mejor estabilidad. (La cantidad específica de búsquedas de estrellas está determinada por el entorno en ese momento).
Detalles del Pixhawk PX4 con GPS M9N
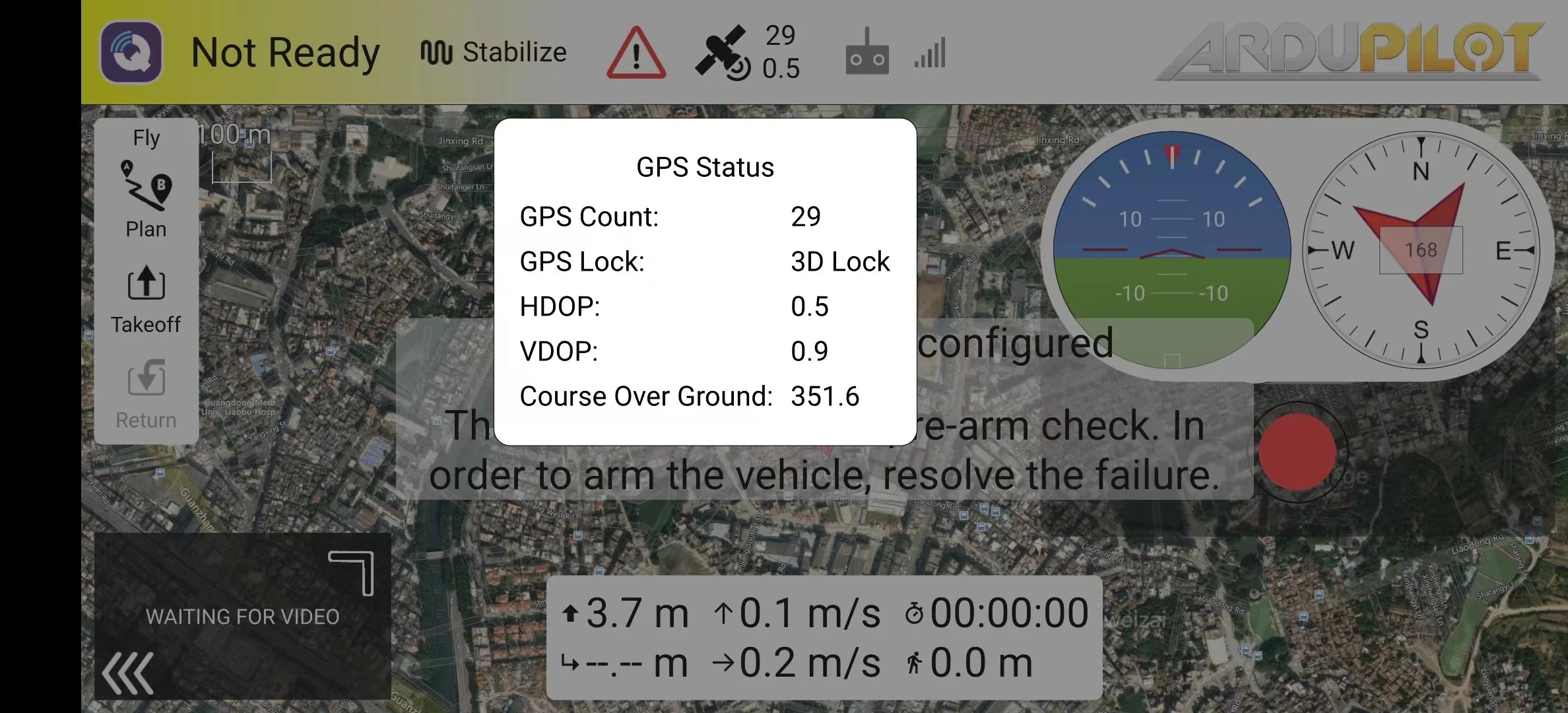
No está listo para el piloto automático. Estabilizar 2.5 ARDUINO Fly Road Linxing Road Estado del GPS: Shuitangshan, Lr Recuento de GPS: 29/10/10 Plan W-168. Bloqueo de GPS: Bloqueo 3D 10 grados. HDOP: 0,5. VDOP de despegue: 0,9. Configurado para navegación en Guangdong Mile. Curso sobre tierra: 351,6. Hospital Universitario de Liaobu Regresar al camino, Verificar: Esperando el video. Apuntando a armar el vehículo, resolver la falla.