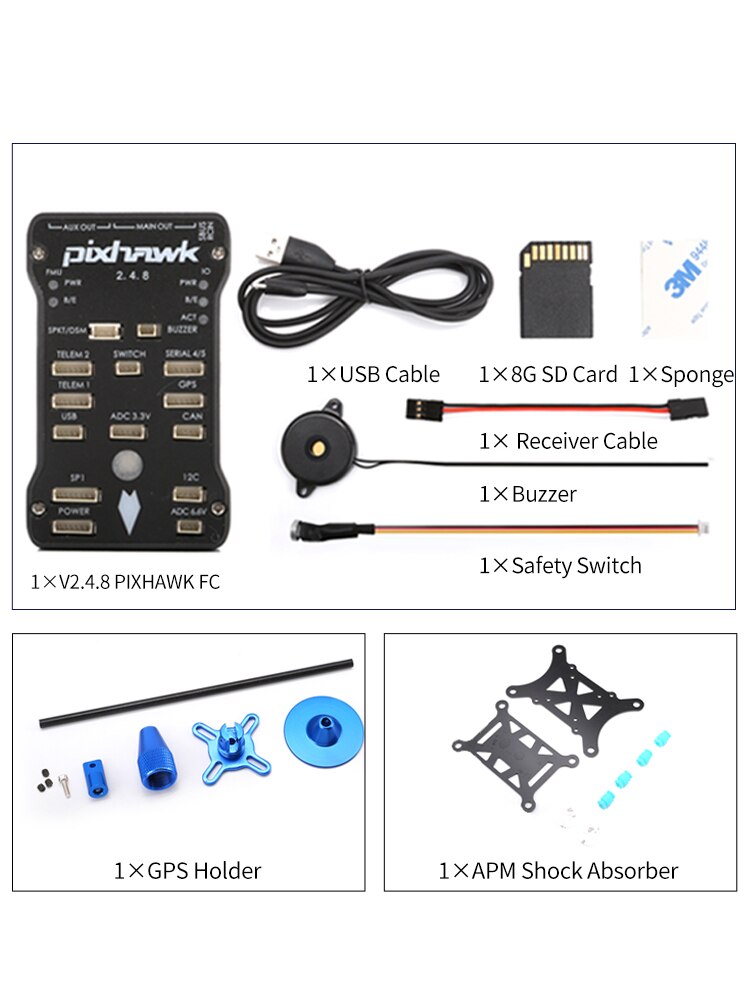
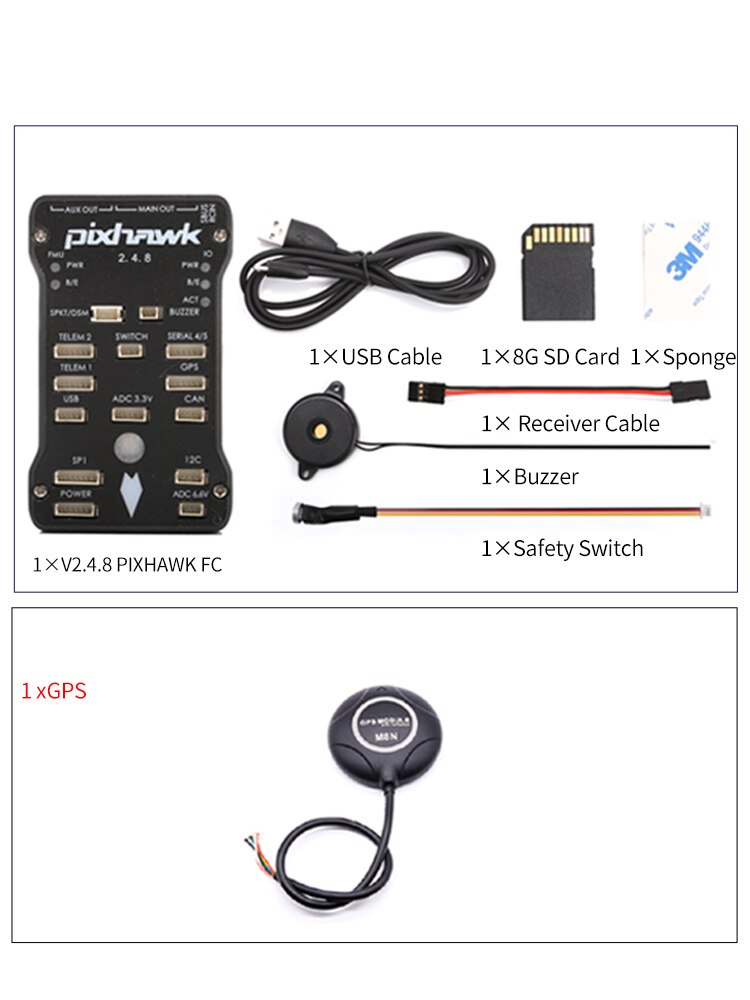
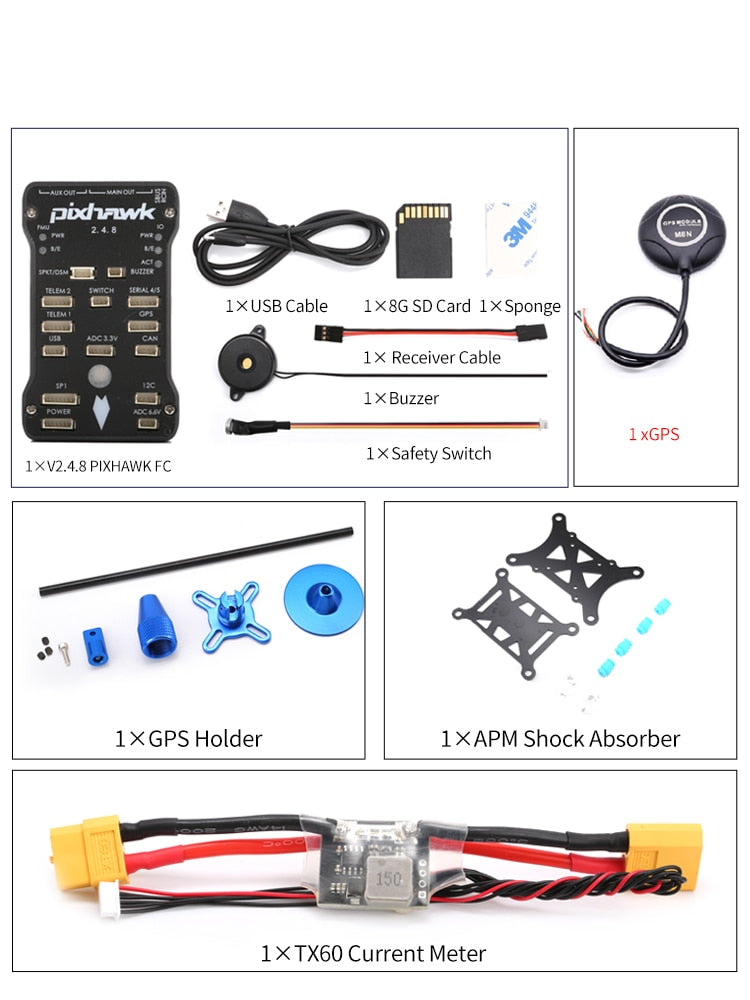
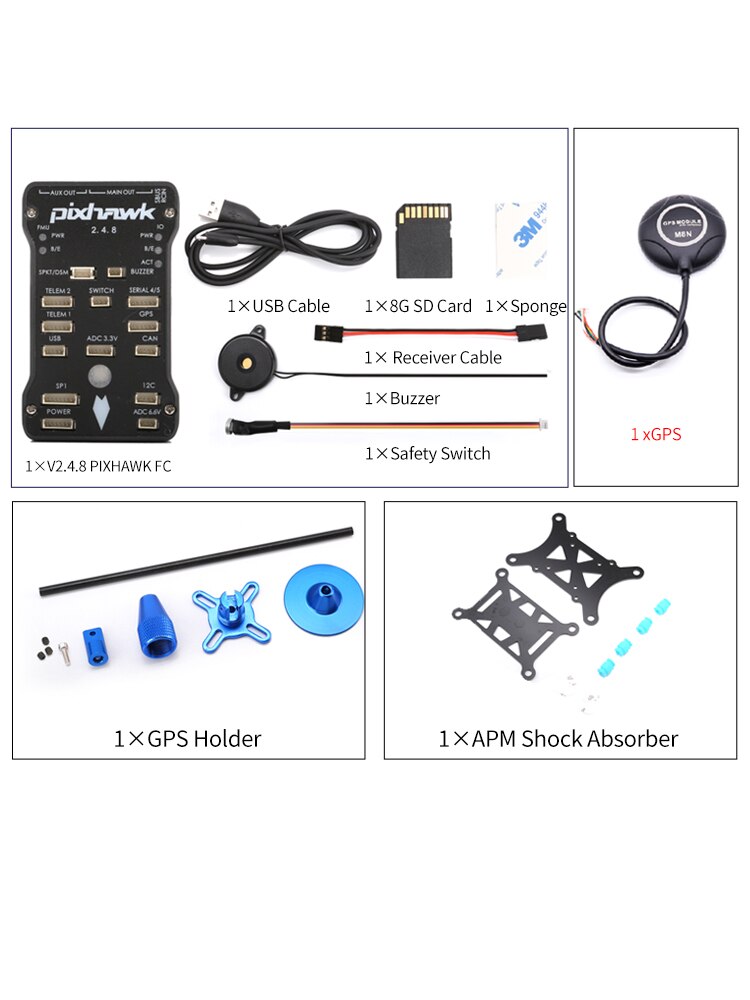
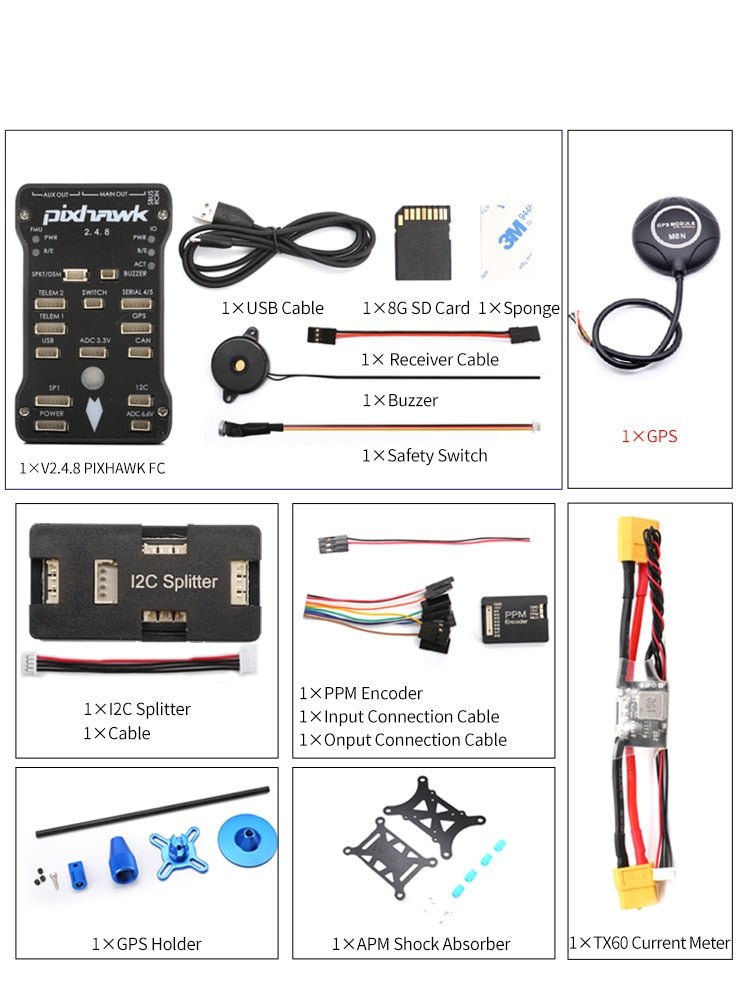
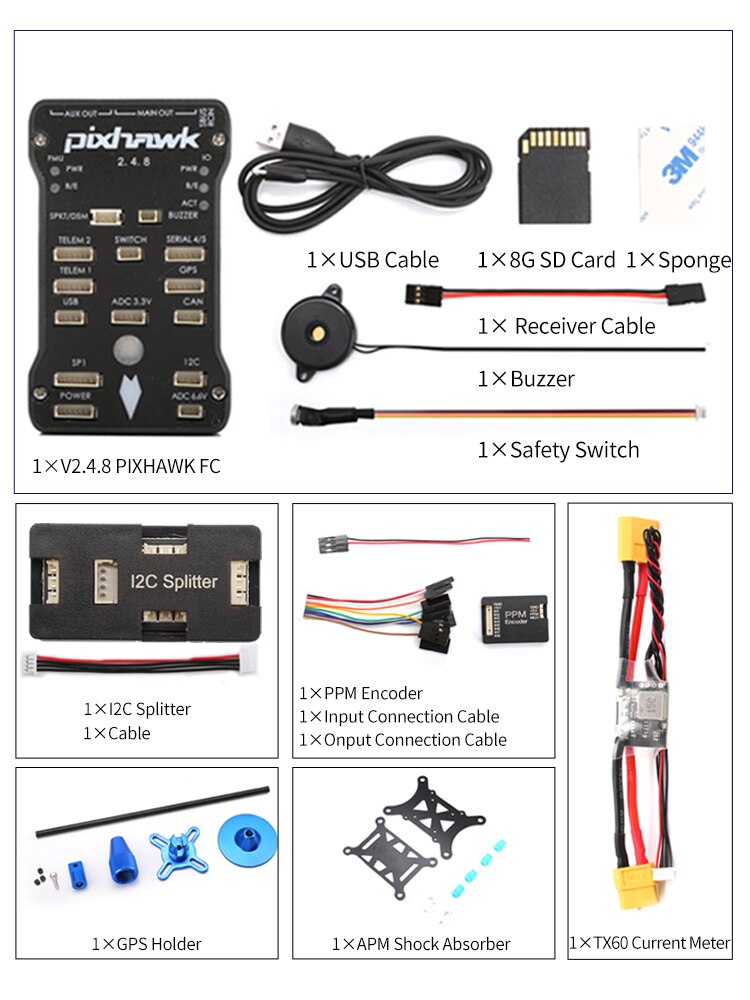
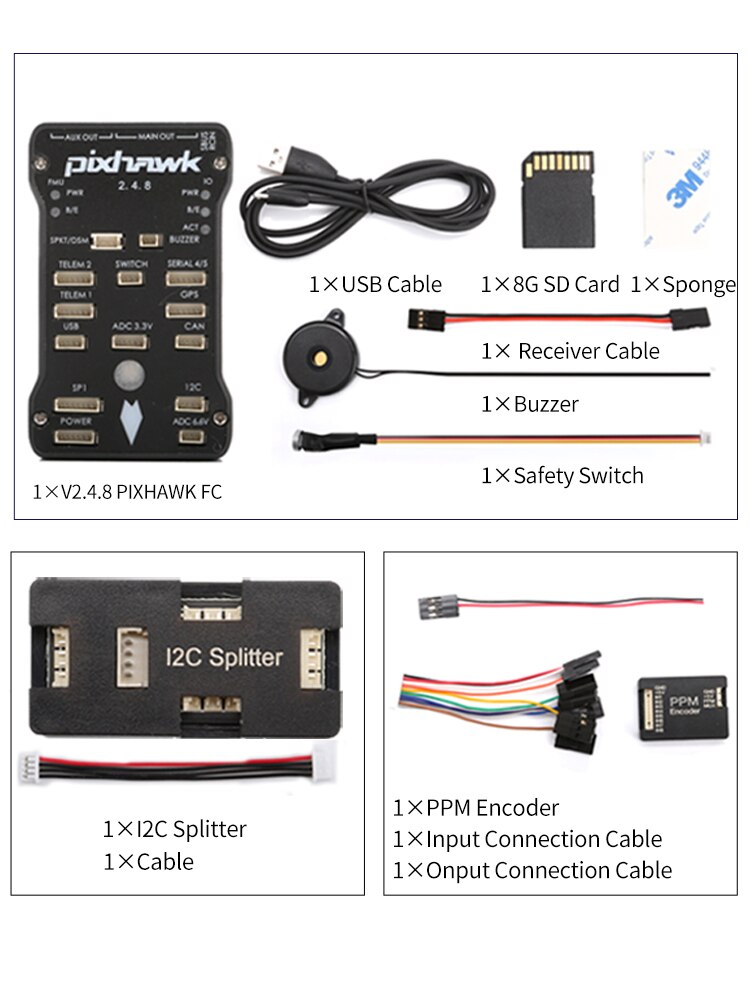
Pixhawk PX4 PIX 2.4.8 Control de vuelo de 32 bits-FC M8N GPS 8G SD zumbador PPM I2C divisor para RC FPV avión Drone Quadcopter coche barco
Pixhawk PX4 PIX 2.4.8 Control de vuelo de 32 bits-FC M8N GPS 8G SD zumbador PPM I2C divisor para RC FPV avión Drone Quadcopter coche barco
RCDrone
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES de control de vuelo Pixhawk PX4 PIX 2.4.8 de 32 bits
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Control de vuelo
Suministros de herramientas: Categoría de ensamblaje
Dispositivos/periféricos de control remoto: Control de vuelo
Edad recomendada: 14+años
Piezas y accesorios de RC: Control de vuelo
Cantidad: 1 pieza
Origen: China continental
Número de modelo: PIX2.4.8
Material: Material compuesto
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Aviones
Nombre de marca: XDRC
Descripción:
- Procesador avanzado CortexM4 ARM de 32 bits de alto rendimiento, puede ejecutar el sistema operativo RTOS NuttX en tiempo real;
- Fuente de alimentación de respaldo integrada y controlador de respaldo de fallas, el controlador principal puede ser conmutado de forma segura al control de respaldo;
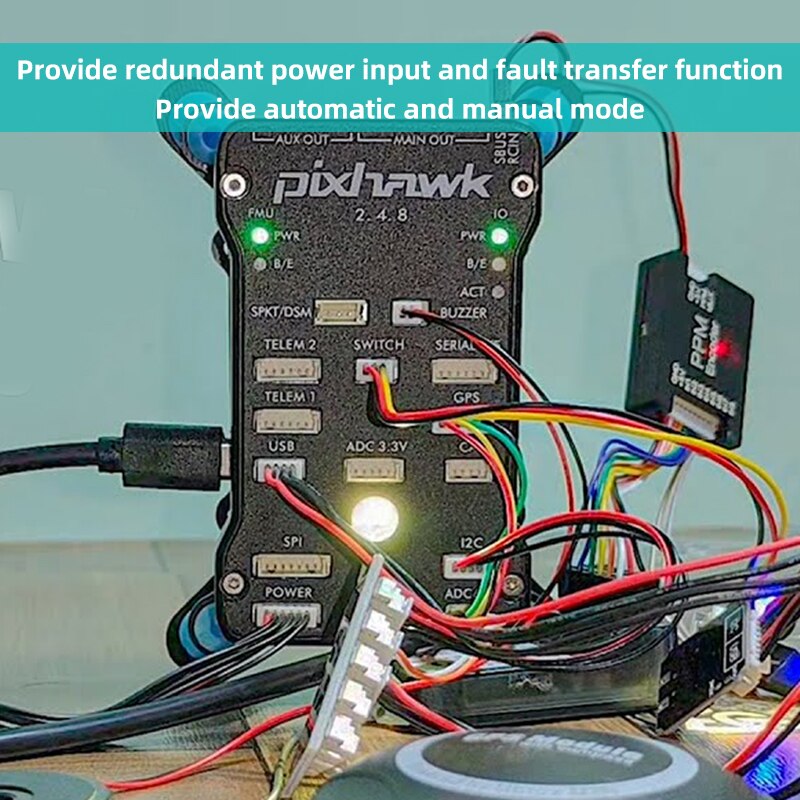
- Proporciona entrada de energía redundante y función de transferencia de fallas;
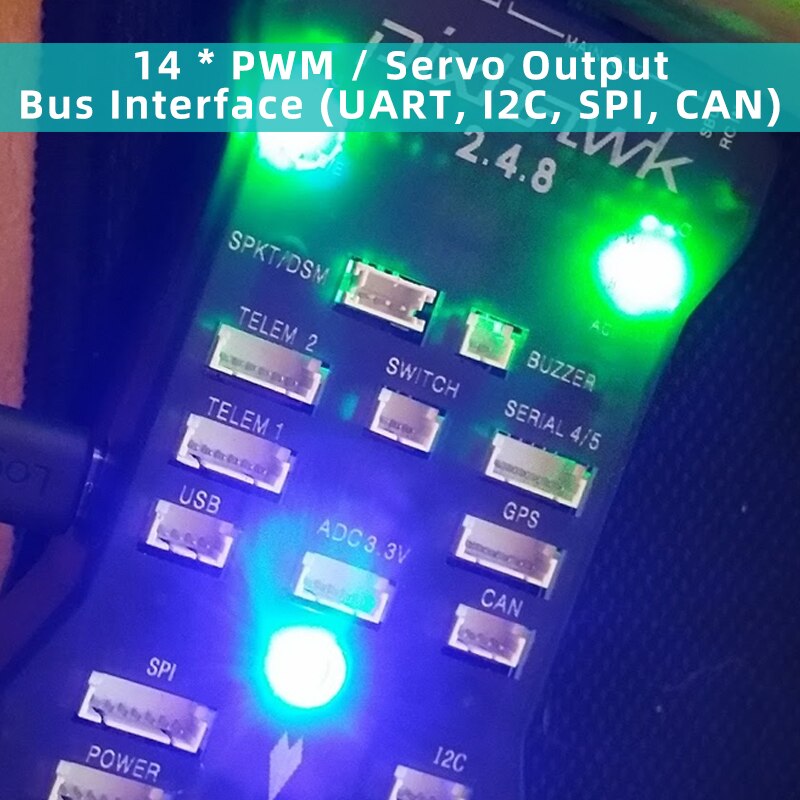
- 14 * salida PWM/servo;
- Interfaz de bus (UART, I2C, SPI, CAN);
- Proporciona modo automático y manual;
- Lámpara LED de color;
- Interfaz de timbre multitono;
- Micro SD para registrar datos de vuelo;
Especificación:
La placa se integra con PX4FMU + PX4IO
Pixhawk tiene nueva tecnología de sensor y chip de 32 bits
Procesador:
Memoria flash de 2 M de 32 bits STM32F427 Cortex M4, con unidad de procesamiento de punto flotante de hardware
Frecuencia principal: 256 K, 168 MHZ de RAM
Coprocesador de respaldo STM32F103 de 32 bits
Sensor:
L3GD20 Giroscopio digital de 16 bits de 3 ejes
Acelerómetro/magnetómetro LSM303D de 3 ejes y 14 bits
Acelerómetro/magnetómetro MPU6000 de 6 ejes
Barómetro de alta precisión MS5611
Interfaz:
1. 5*UART(1*alto voltaje compatible; 2*control de flujo de hardware)
2. 2*CAN
3. Entrada compatible con receptor de satélite Spektrum DSM / DSM2 / DSM-X
4. Entrada y salida compatibles con Futaba SBUS
5. Entrada de señal PPM
6. Entrada RSSI (PWM o voltaje)
7. I2C
8. SPI
9. Entrada de 3,3 y 6,6 VCC
10. Interfaz MICRO USB externa


'iwrIGTB KeHRISTB USB CAN(controlador de red) EEES7+81033 LED Ja7FKJ Spi SPI #TJ96Q20) 12C 500E3273@ PoreR ADC 0 @ixitR 16E37+610%8 Dbduik 5X JX 630 PPM ES4A SBUS (S94' SMHS'RE SD $ 298 artículol)

Related Collections