Pixhawk PX4 PRO PIX Controlador de vuelo de 32 bits Piloto automático - con 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
Pixhawk PX4 PRO PIX Controlador de vuelo de 32 bits Piloto automático - con 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
RCDrone
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del piloto automático del controlador de vuelo Pixhawk PX4 PRO PIX de 32 bits
Distancia entre ejes: Placa inferior
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Marco
Suministros de herramientas: Clase ensamblada
Parámetros técnicos: KV1100
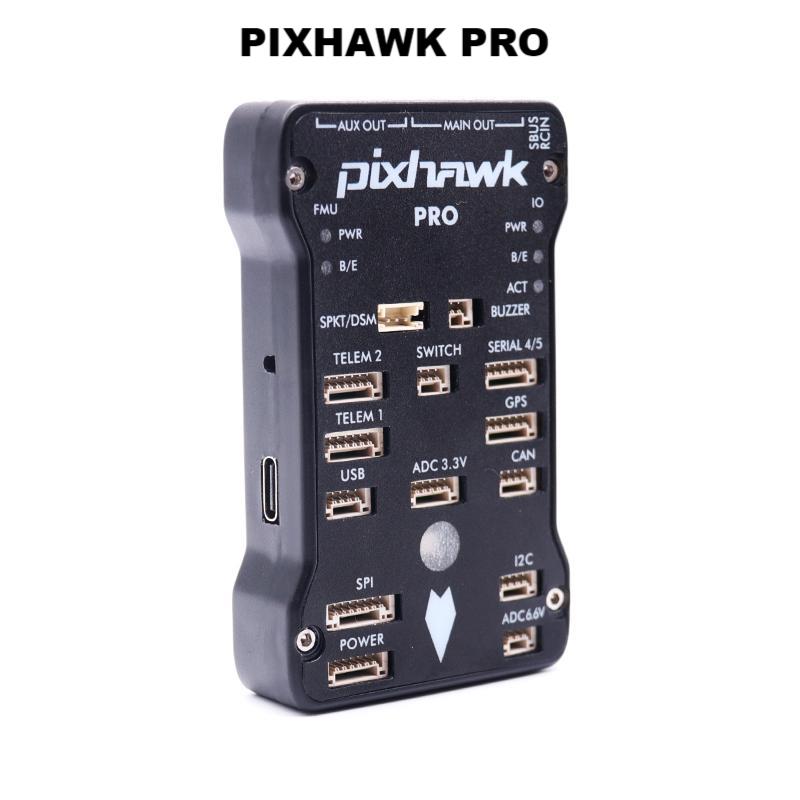
Tamaño: 80*48*15
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 12+años, 14+años
Piezas y accesorios de RC: Componentes del motor
Cantidad: 1 unidad
Origen: China continental
Número de modelo: PIXHAWK PRO
Material: EVA
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Aviones
Nombre de marca: rctosky

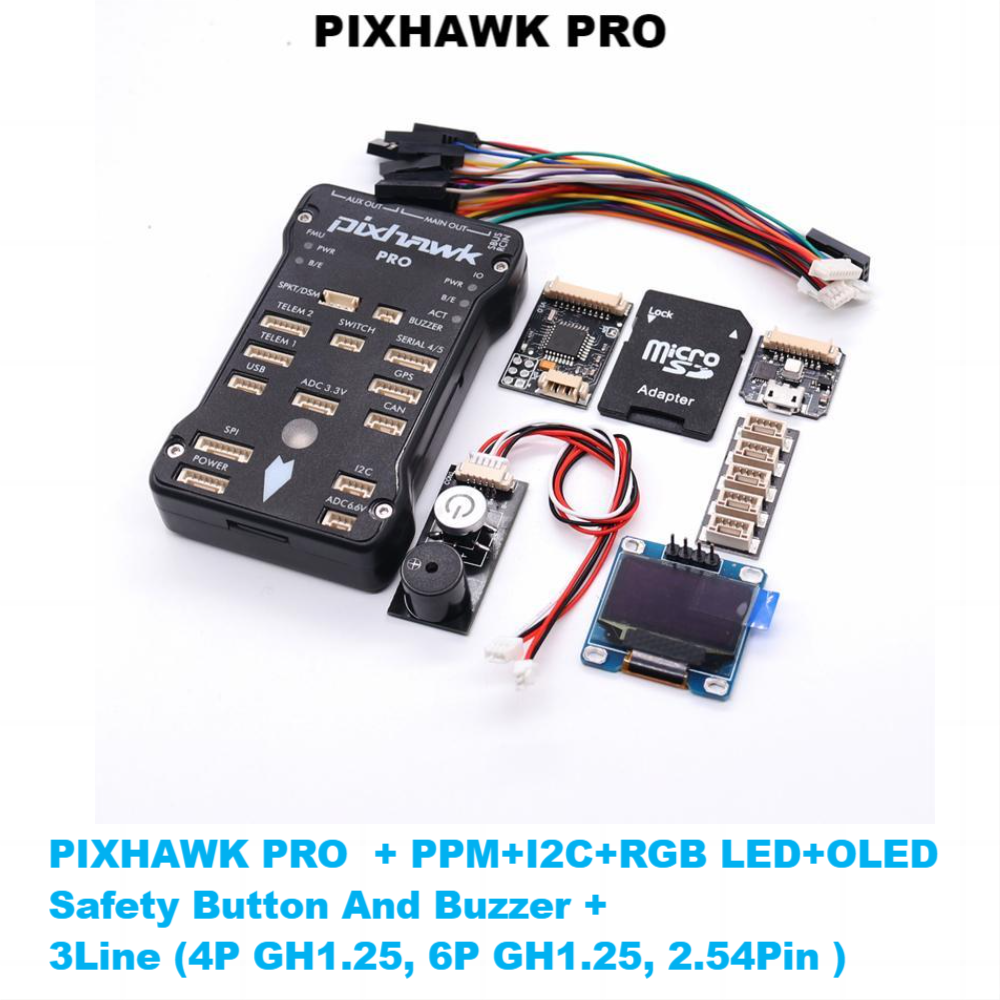
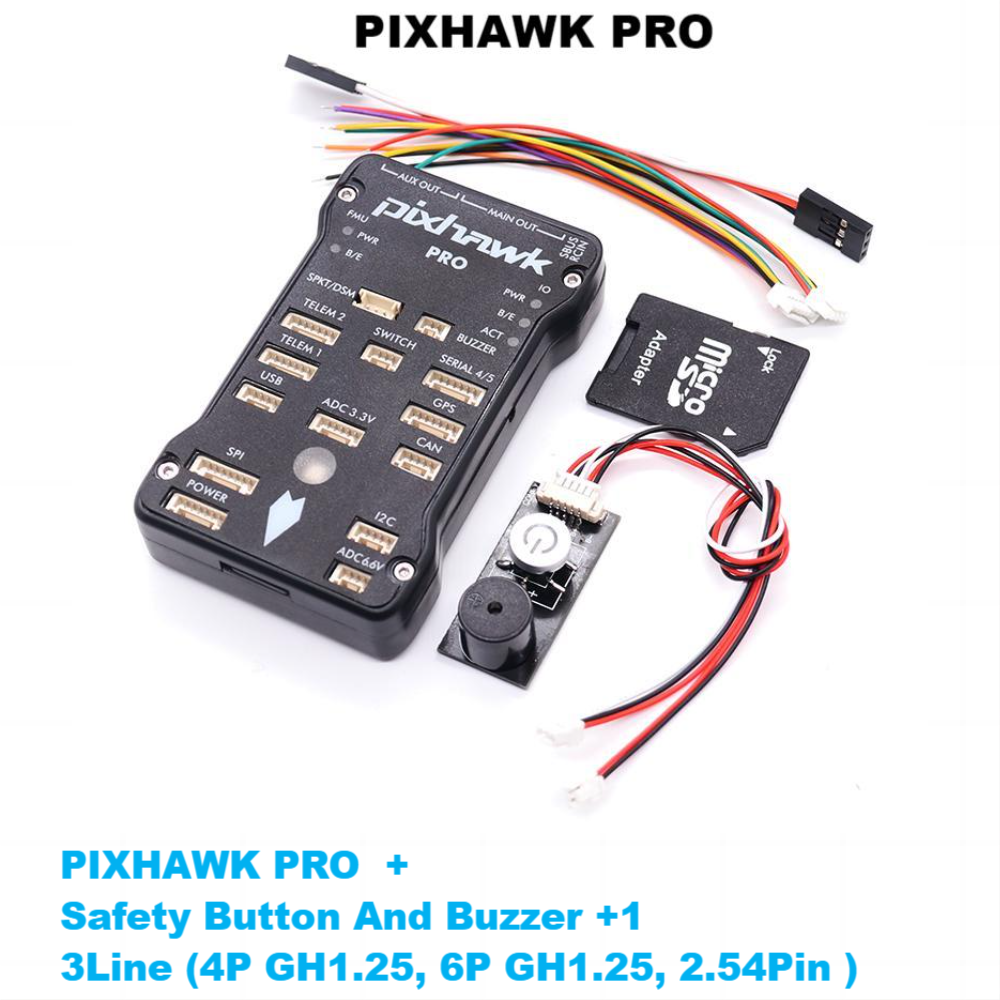
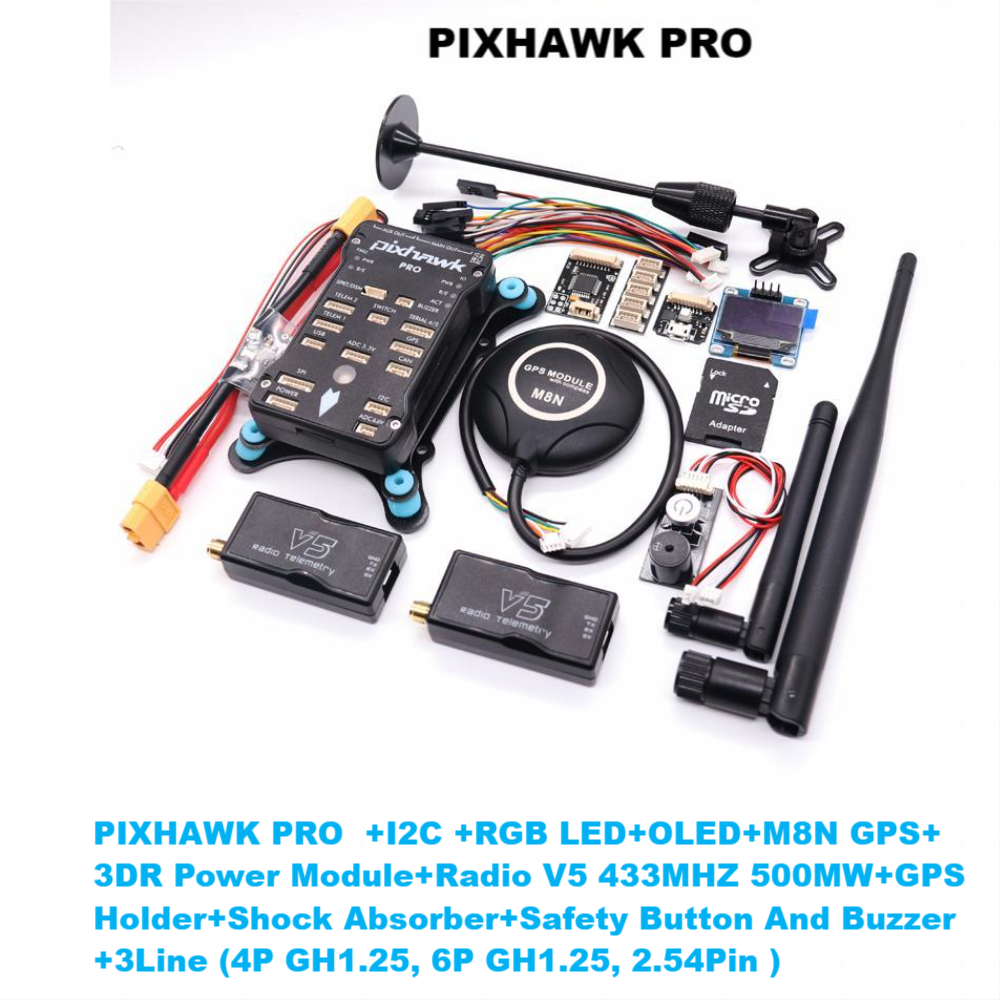
El Pixhawk admite las últimas versiones de firmware ArduPilot y PX4, incluidas 2.4.8 y PRO. Cuenta con un puerto GH dedicado con un mecanismo de bloqueo para una conexión más estable y una interfaz USB TYPE-C para una comunicación confiable.
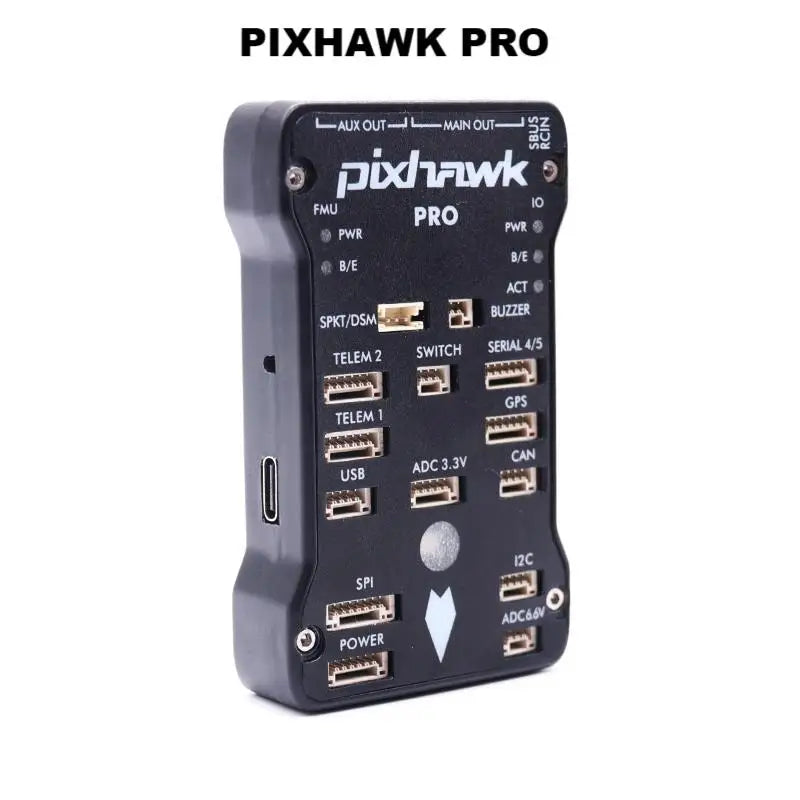



PIXHAWK PRO AUX OUT- OUT 32 pixdnuwk FMU PRO PWR FWR BE BTE ACT SPKTDSM BUZZER TELEM Switch Serial4/5 TYPE-C USB TeLEM GPS USB ADC 3 3v CAN SpI 12C POWER AdcG6
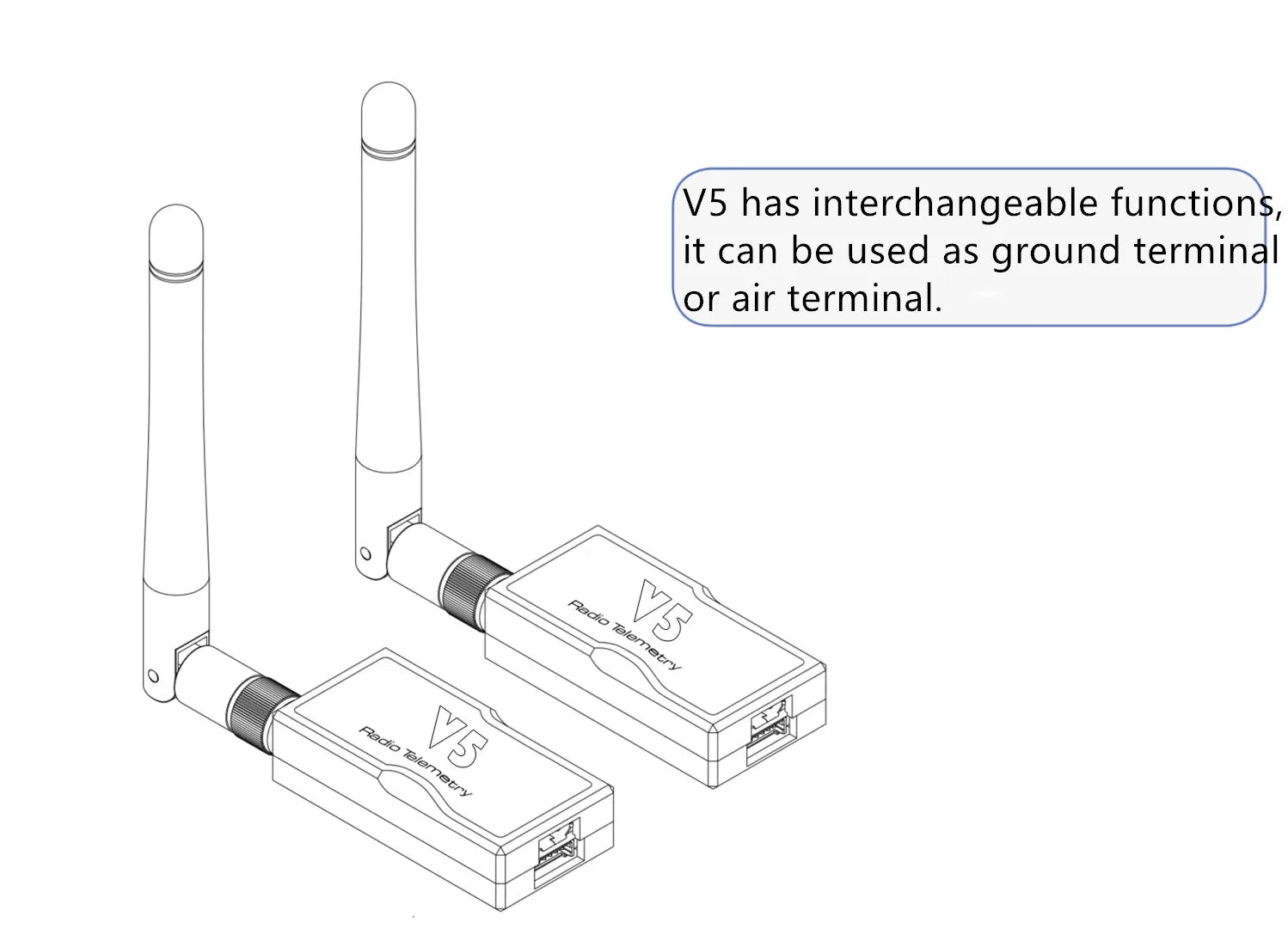
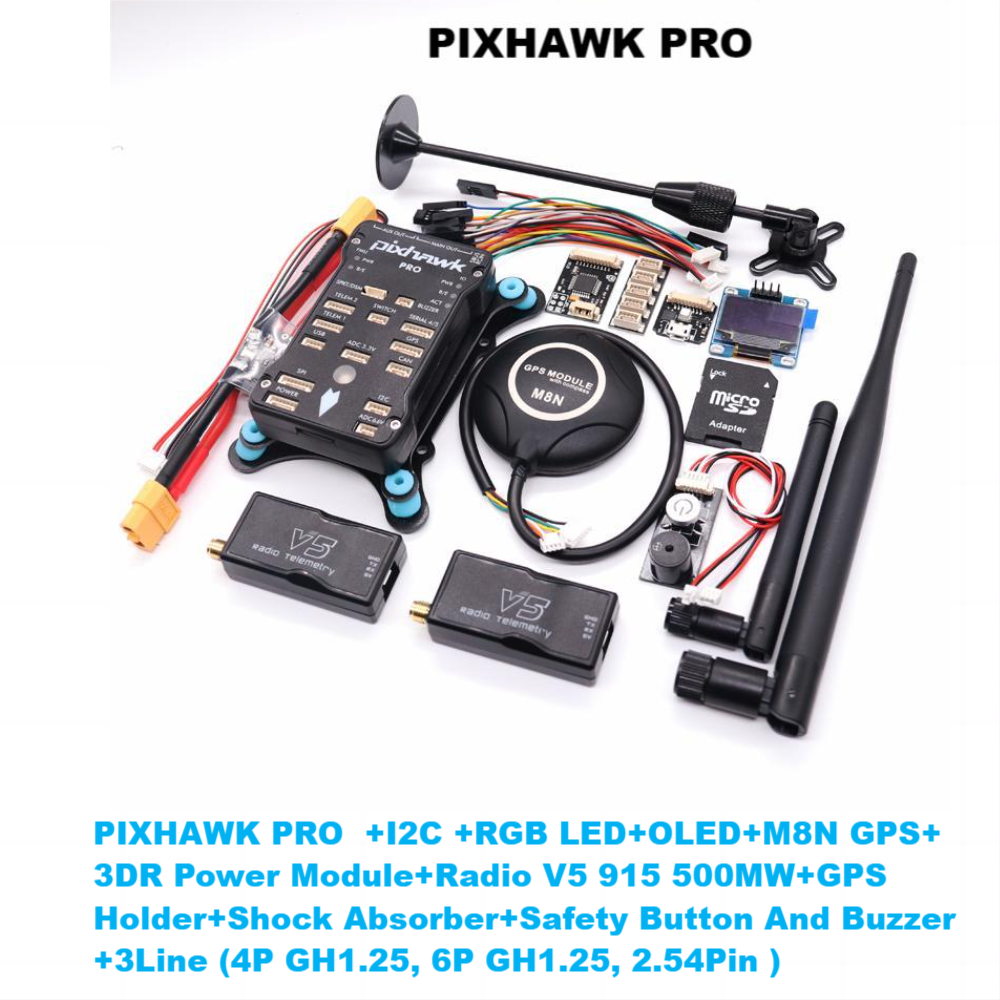
El controlador de vuelo Pixhawk PX4 PRO tiene funciones intercambiables, lo que permite utilizarlo como estación terrestre y terminal aérea.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_2f6b2a1e-638a-4d31-9f81-30e9dc1b04c8.webp?v=1714895618)
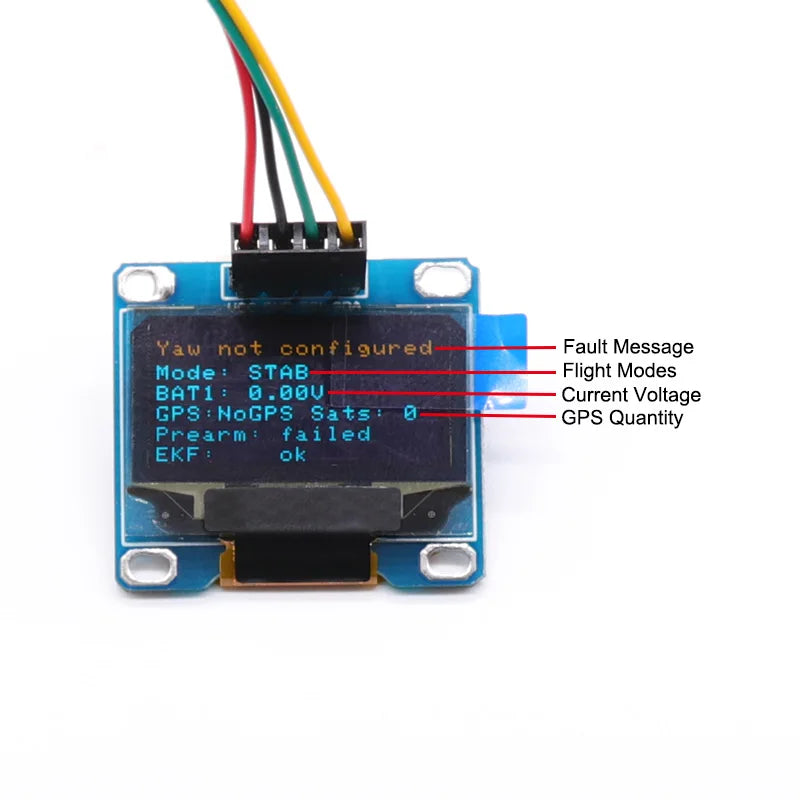
Advertencia: No configurado. Modo de mensaje de error: modos de vuelo estables no disponibles. Nivel de batería: 0% (BAT1). Corriente: 0,00 uA. Voltaje: desconocido. GPS: no hay señal GPS disponible. Cantidad de GPS: desconocido. El prearmado falló. EKF no inicializado.
Related Collections