







PIXHAWK2.4.8 Kit de marco de fibra de carbono 450 de control de vuelo - Ardupilot 100MW Radio Telemetría Quadcopter BLHELI 20A 2212 Motor ESC
PIXHAWK2.4.8 Kit de marco de fibra de carbono 450 de control de vuelo - Ardupilot 100MW Radio Telemetría Quadcopter BLHELI 20A 2212 Motor ESC
RCDrone
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del kit de marco PIXHAWK2.4.8 Flight Control de fibra de carbono 450
Uso: Vehículos y juguetes de control remoto
Edad recomendada: 12+años, 14+años, 6-12 años
Origen: China continental
Material: Fibra de carbono
Nombre de marca: rctosky
Pixhawk 2.4.8 admite el último firmware oficial de ardupilot y PX4.
1. Los procesadores avanzados de alto rendimiento ARM CortexM4 de 32 bits (flash de 2 MB) pueden ejecutar el sistema operativo NuttX RTOS en tiempo real;
2. 14 salidas PWM/servo;
3. Interfaz de bus (UART, I2C, SPI, CAN);
4. La alimentación de respaldo integrada y el controlador de respaldo fallan, el controlador primario conmuta por error al control de respaldo es seguro;
5. Proporcionar modos automático y manual;
6. Proporcionar entrada de energía redundante y conmutación por error;
7. Luces LED multicolores;
8. Proporciona una interfaz de zumbador multitono
9. Grabación de datos de vuelo en Micro SD;
Especificaciones:
Interfaz
1 .5 UART 1, 2 compatible con alto voltaje con control de flujo de hardware
2. 2 PUEDE
3. Entrada compatible con receptor de satélite Spektrum DSM / DSM2 / DSM-X
4.Entradas y salidas compatibles con Futaba SBUS
Entrada de señal de 5.PPM
6.Entrada RSSI (PWM o voltaje)
7.I2C
8.SPI
Entrada de 9.3.3 y 6.6VACC
10. Interfaz MICRO USB externa
Colocación simple:
F450+4 PCS BLHELI 30A +4 pares de hélices 1045 +4 PCS 2212 920KV motor
Paquete simple:
F450+4 PCS BLHELI 30A +4 pares de hélices 1045 +4 PCS 2212 motor de 920KV
Paquete estándar:
F450+4 PCS BLHELI 30A +4 pares de hélices 1045 +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (carcasa blanca o negra)+ Tarjeta TF 4G + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + 3 líneas (4 pines 1,25 ,6 pines 1,25 ,3 pines 2.5.4)
Paquete alto:
F450+4 PCS BLHELI 30A +4 pares de hélices 1045 +4 PCS 2212 920KV motor
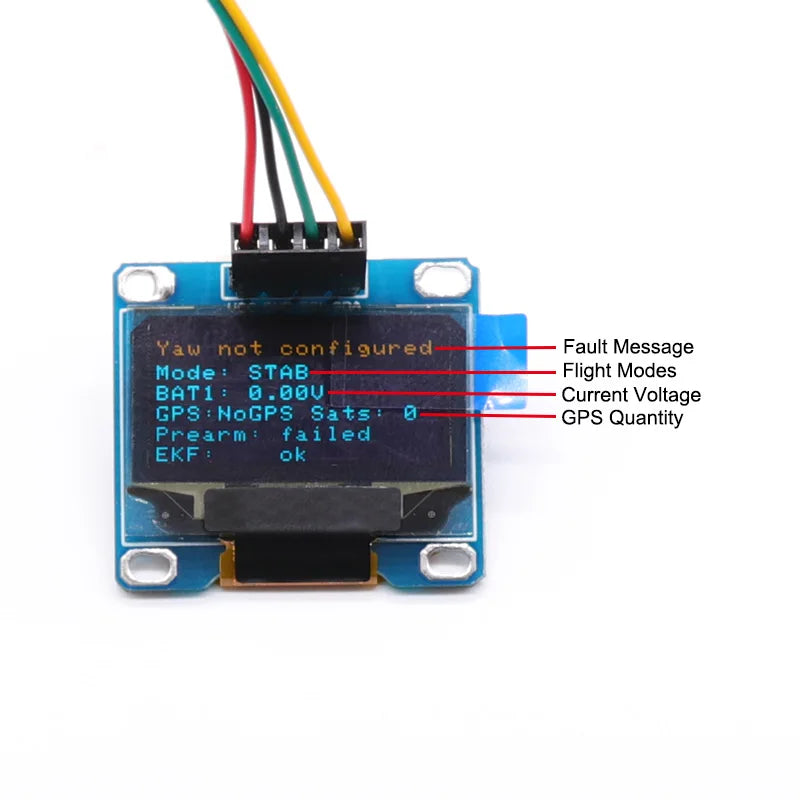
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta TF 4G + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + Led RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1.25 ,3 pines 2.5.4)
433MHZ 100MW A :
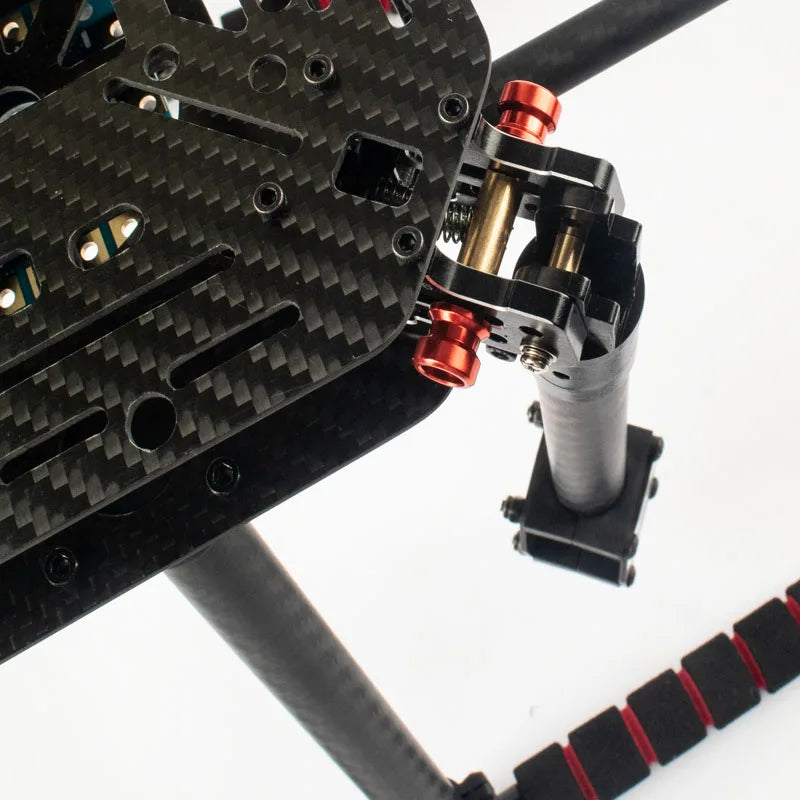
PIXHAWK 2.4.Tarjeta TF 8+ 4G + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + 3 líneas (4 pines 1,25, 6 pines 1,25, 3 pines 2.5.4) + GPS M8N + Soporte para GPS + Módulo de alimentación 3DR + Amortiguador + Radio telemetría de 433 MHZ 100 MW
433MHZ 500MW B:
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta 4G TF + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + LED RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1,25 , 3 pines 2.5.4 ) + M8N GPS+ Soporte GPS+ Módulo de alimentación 3DR+Amortiguador+433MHZ 500MW Radio telemetría
433MHZ 1000MW C:
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta 4G TF + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + LED RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1,25 , 3 pines 2.5.4 ) + M8N GPS+ Soporte GPS+ Módulo de alimentación 3DR+Amortiguador+433MHZ 1000MW Radio telemetría
915MHZ 100MW A:F450+4 PCS BLHELI 30A +4 pares 1045 hélices +4 PCS 2212 920KV motor
PIXHAWK 2.4.8+ Tarjeta TF 4G + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + 3 líneas (4 pines 1.25, 6 pines 1.25, 3 pines 2.5.4) + GPS M8N + Soporte para GPS + Módulo de alimentación 3DR + Amortiguador +915MHZ 100MW Radiotelemetría
915MHZ 500MW B:
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta 4G TF + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + LED RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1,25 , 3 pines 2.5.4 ) + M8N GPS+ Soporte GPS+ Módulo de alimentación 3DR+Amortiguador+915MHZ 500MW Radio telemetría
433MHZ 1000MW :
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta 4G TF + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + LED RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1,25 , 3 pines 2.5.4 ) + M8N GPS+ Soporte GPS+ Módulo de alimentación 3DR+Amortiguador+433MHZ V5 1000MW Radio telemetría
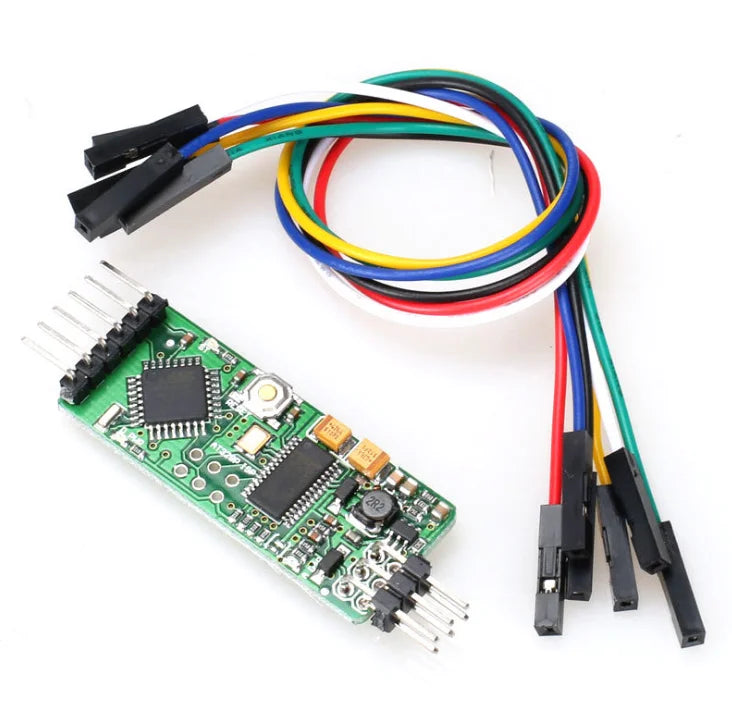
433MHZV5 1000MW OSD:
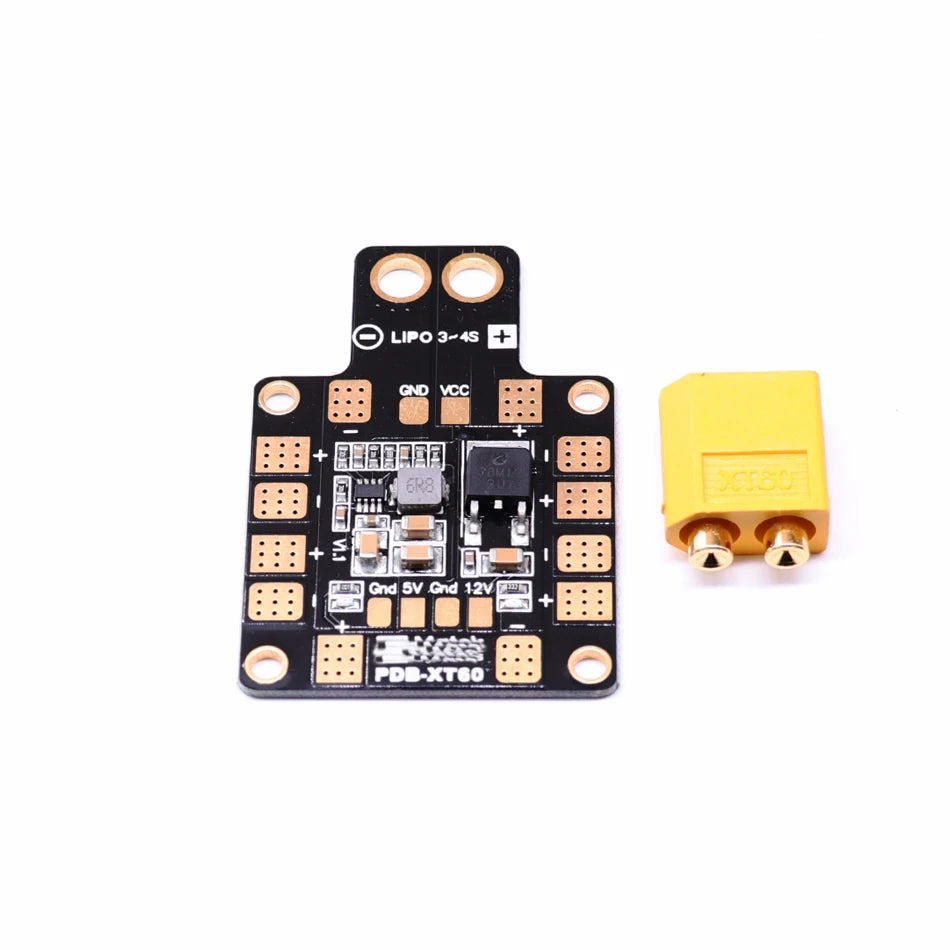
PIXHAWK 2.4.8 (carcasa blanca o negra) + Tarjeta TF 4G + Botón de seguridad + Zumbador + Codificador PPM + Placa de expansión I2C + LED RGB + Pantalla OLED + 3 líneas (4 pines 1,25 , 6 pines 1,25 , 3 pines 2,5.4) + M8N GPS+ Soporte GPS+ Módulo de alimentación 3DR+Amortiguador+433MHZ V5 1000MW Radio telemetría+MINI OSD +PDB
Paquete SUPERIOR:
F450+4 PCS BLHELI 30A +4 pares sautobloqueo< T35411>



A.Características
A1: Utilice componentes electrónicos auténticos para garantizar la alta calidad y mejorar la capacidad de resistencia actual del ESC.
A2: Basado en el firmware BLHeli, optimizado para un alto rendimiento con gran linealidad y una respuesta del acelerador mucho más rápida.
A3: Diseñado especialmente para multirotores, y compatible con aviones y helicópteros.
A4: Múltiples funciones de protección que incluyen protección de corte de bajo voltaje/protección contra sobrecalentamiento/protección de pérdida de señal del acelerador.
A5: El rango del acelerador se puede configurar y es totalmente compatible con todos los receptores, lo que proporciona una respuesta del acelerador suave, lineal y precisa. R6: Todos los parámetros se pueden programar mediante el uso de un transmisor, incluidas las configuraciones predeterminadas.
B. Especificación del producto
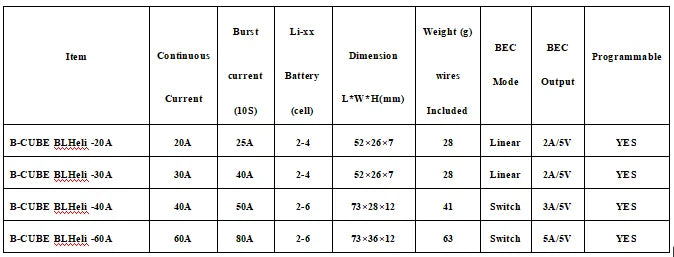
BEC BEC Treni Cobnbuou: DileD D Corriente programable Batfert Vir e: Modo Salida Corriente LtutHoinil (105) Iocluido B-CCBE BLHeli -20A 026 27 LineAr 4T"

1045 hélices

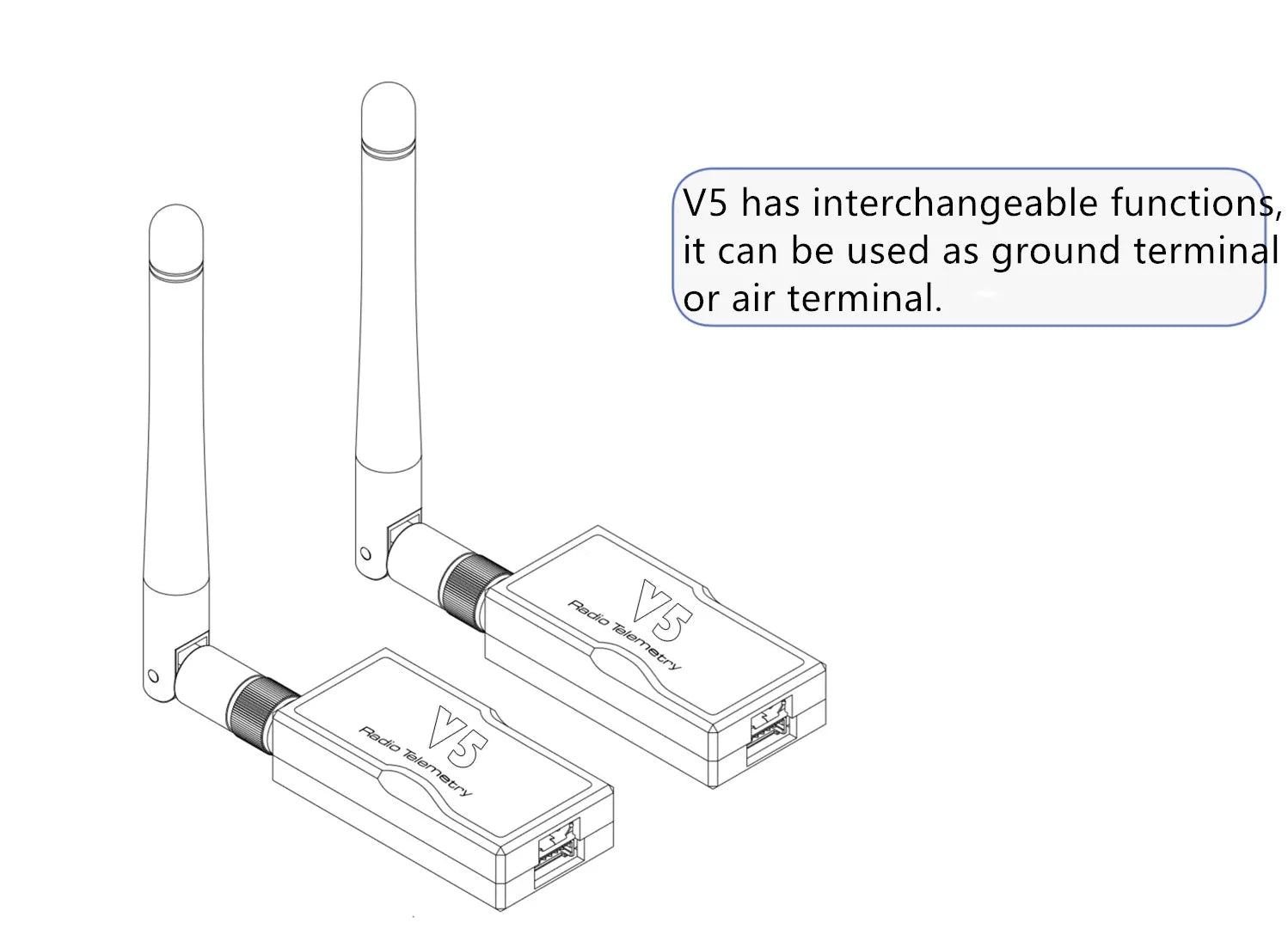
El módulo V5 presenta una funcionalidad intercambiable, lo que le permite servir como estación terrestre o terminal aérea.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)


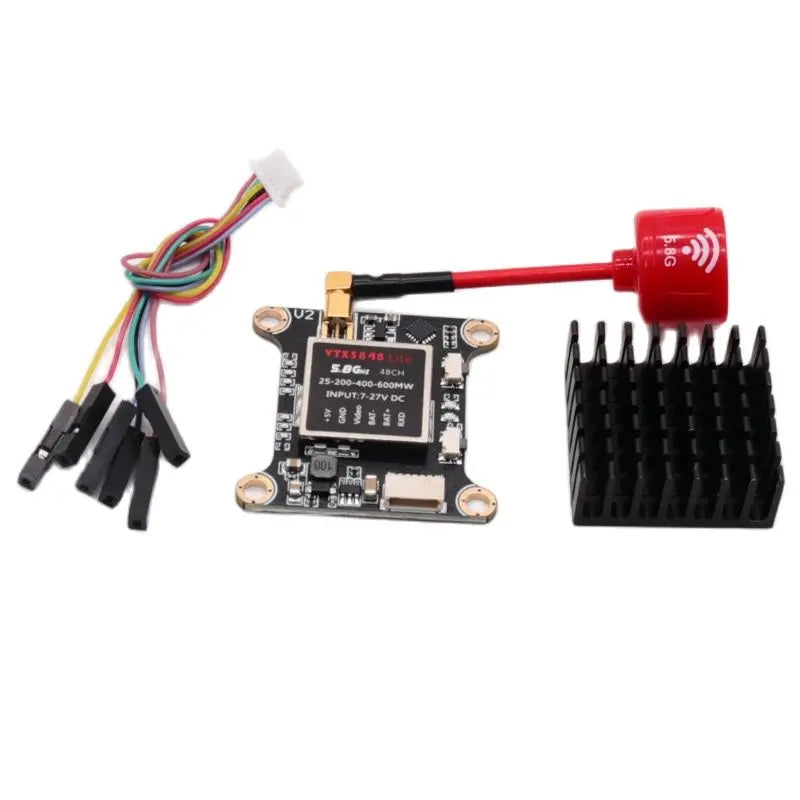
VTX5848 es un transmisor de video, admite 25MW-600MW, 48 canales (con disipador de calor y antena 3DB)
Cámara FPV

Este artículo explica cómo conectar los ESC, motores y hélices a un piloto automático.El Pixhawk se utiliza como ejemplo, pero otros pilotos automáticos están conectados de forma similar.
Conecte los cables de alimentación (+), tierra (-) y señal (es) para cada ESC a las clavijas de salida principales del piloto automático por número de motor. Encuentre su tipo de bastidor a continuación para determinar el orden asignado de los motores.

Pasadores de salida Pixhawk (numerados). Los primeros 4 pines están codificados por colores para conectar un Quadframe
Diagramas de orden de motores
Los diagramas siguientes muestran el orden de los motores para cada tipo de estructura. Los números indican qué pin de salida del piloto automático debe conectarse a cada motor/hélice. La dirección de la hélice se muestra en verde (en el sentido de las agujas del reloj, CW) o en azul (en el sentido contrario a las agujas del reloj, CCW)

Leyenda de diagramas de orden de motores
Cuadcóptero

Reconocimiento de hélices en sentido horario y antihorario

Los diagramas anteriores muestran dos tipos de hélices: en sentido horario (llamados empujadores) y en sentido antihorario (llamados tiradores). El más fiable es reconocer el tipo de hélice correcto por su forma, como se muestra a continuación. El borde más grueso es el borde de ataque que se mueve en el sentido de rotación. El borde de salida tiene un festoneado más radical y suele ser más delgado.
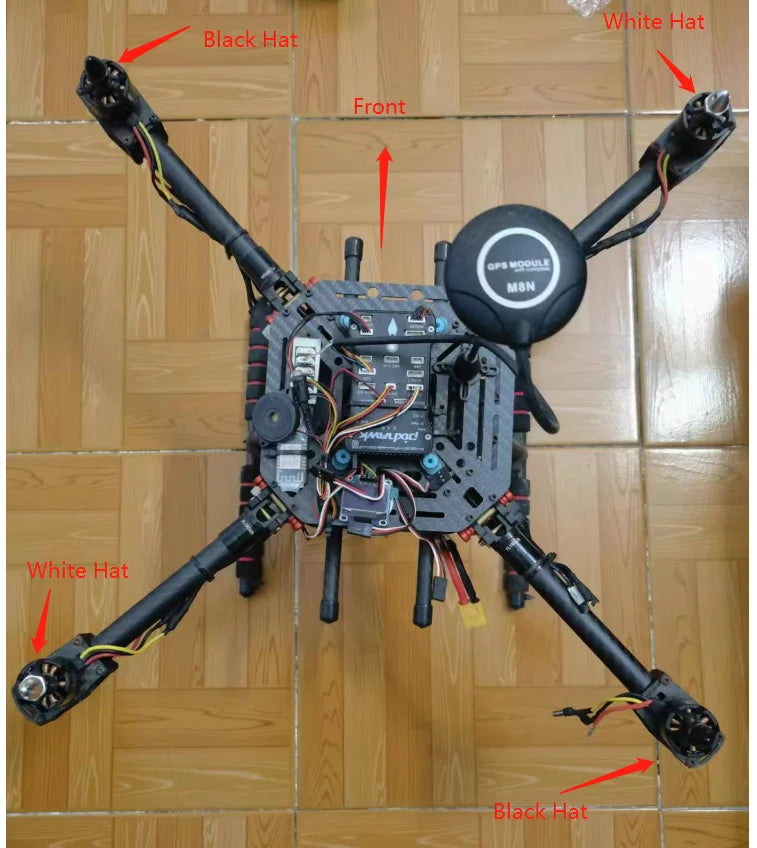
¿Cómo instalar el motor?
Related Collections






















