







Kit QAV250 250 mm FPV Racing Drone con 2205 2300kV Motores, controlador de vuelo F4, LittleBee 30A Blheli_S ESC y 1200TVL Camera
Kit QAV250 250 mm FPV Racing Drone con 2205 2300kV Motores, controlador de vuelo F4, LittleBee 30A Blheli_S ESC y 1200TVL Camera
RCDrone
No se pudo cargar la disponibilidad de retiro

El paquete incluye:
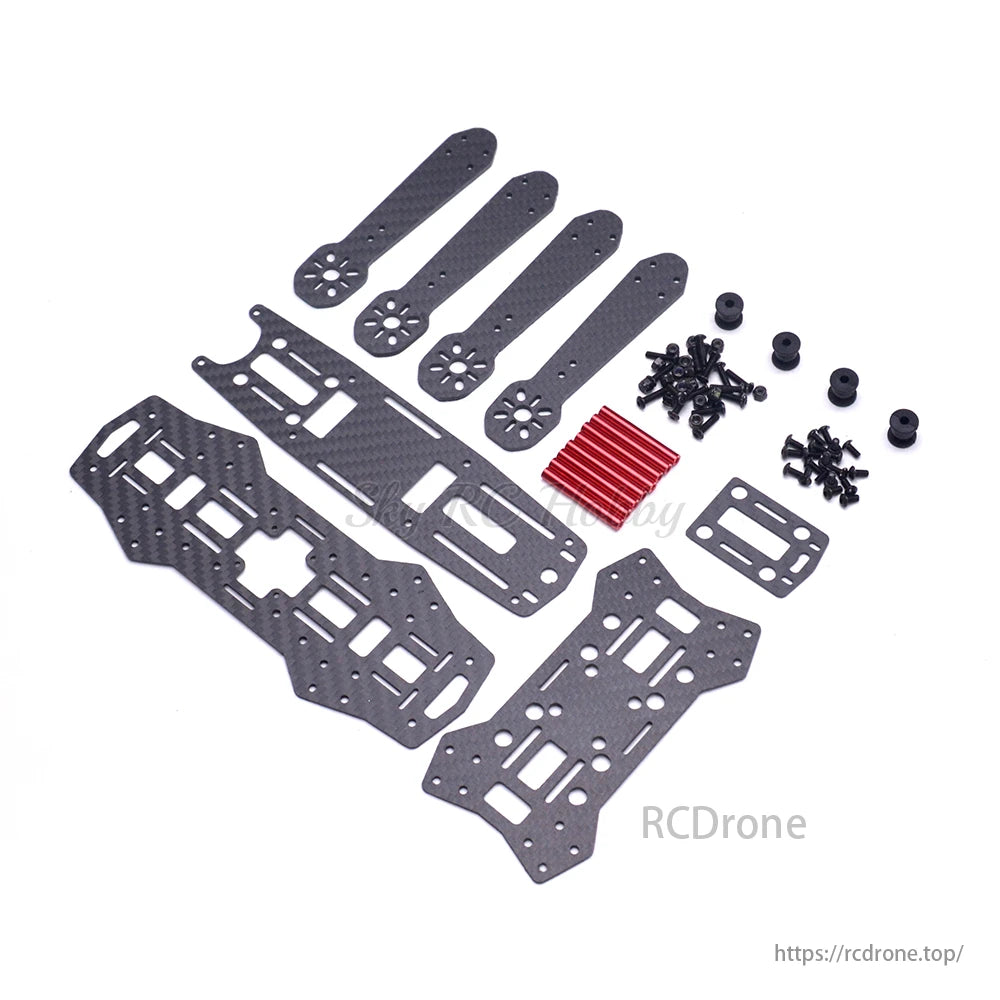
1 x Kit de cuadro de fibra de carbono ZMR250
4 motores RS2205 de 2300 kV
4 variadores de frecuencia Littlebee de 30 A (Nota: Hay dos tipos de Littlebee 30A ESC, los enviaremos al azar).
1 x F3 Acro / Controlador de vuelo F4 V3S / F405 Plus (Envíalo como prefieras)
1 x Placa de distribución de energía
1 cámara de 1200 líneas de TV
4 hélices 5045
1 x UBEC
1 x Correa de batería
Kit de cuadro de fibra de carbono QAV250 de 250 mm:
Presupuesto:
- Material principal: Fibra de carbono completa.
- Con amortiguador de goma para disminuir la vibración durante el vuelo.
- Espaciador de aleación de aluminio, ligero y confiable.
- Distancia entre ejes: 250 mm
- Peso: 136g±2

Controlador de vuelo F3 ACRO:
Características
• E/S sin compromisos. Utilice todas las funciones en todo momento; por ejemplo, conecte su OSD + SmartPort + SBus + GPS + LED Strip + Monitoreo de batería + Sonar + 8 motores: ¡todo al mismo tiempo!
• Registrador de registro de vuelo de caja negra de alta capacidad a bordo: optimice su ajuste y vea los resultados de su configuración sin conjeturas (deluxe).
• Procesador STM32 F3 de próxima generación con unidad de punto flotante de hardware para cálculos de vuelo eficientes y más rápidos
Núcleo ARM-Cortex M4.
• Diseño apilable: perfecto para integrar con OSD y placas de distribución de energía.
• 16 líneas de E/S PWM para ESC, servos y receptores heredados. 8 disponibles en conectores de pines estándar. 8 a través del lado Conectores montados.
• Soporte completo para ESC OneShot para un fácil ajuste de PID y una respuesta más nítida.
• Compatible con receptores SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM y PWM. No requiere inversores externos. (incorporado).
• Salida dedicada para LED programables: ideal para orientación, carreras y vuelos nocturnos.
• Puerto I2C dedicado para la conexión de pantalla OLED sin necesidad de batería de vuelo.
• Puertos de monitoreo de batería para voltaje y corriente.
• Soporte de sonar para mantener la altitud baja con precisión.
• Puerto de zumbador para advertencias y notificaciones audibles.
• Puerto de depuración (SWD) amigable para desarrolladores y selección de modo de arranque, cargador de arranque inbloqueable.
• Diseño simétrico para un cableado súper ordenado.
• Conecte el cable con conectores de pines, zócalos JST-SH o almohadillas de soldadura. Use conectores de pines rectos o en ángulo recto.
• Barómetro montado en la parte inferior del tablero para un fácil aislamiento del viento.
• Tiempos de bucle hasta aproximadamente 2 veces más rápidos que las placas basadas en STM32F1 de la generación anterior.
• Configuración del controlador de vuelo a través de una GUI multiplataforma (Windows/OSX/Linux).
• Admite una variedad de aeronaves, tricópteros, cuadricópteros, hexacópteros, octocópteros, aviones y más.
Software
El SPRacingF3 ejecuta el software de control de vuelo (FC) de código abierto Cleanflight, que cuenta con una comunidad en constante crecimiento. De desarrolladores y usuarios amigables. Ser de código abierto significa que tú también puedes contribuir al sistema.
Cleanflight viene con un manual detallado que es revisado y mantenido por los desarrolladores de Cleanflight y Comunidad. No más páginas wiki obsoletas ni información de segunda mano.
Asegúrese de consultar el manual apropiado para su versión de firmware.
Historia
El hardware fue diseñado por el desarrollador principal de Cleanflight, Dominic Clifton, para ser más capaz que el Placas basadas en STM32F1 después de escuchar los comentarios de los usuarios, colaboradores y pilotos destacados de Cleanflight.
El incumplimiento de estas advertencias anulará la garantía y destruirá su vuelo. controlador.
• Respete la polaridad en todo momento. Verifique y vuelva a verificar antes de conectar la alimentación.
• APAGUE el dispositivo antes de desenchufar, enchufar o realizar cualquier conexión.
• Conecte solo una FUENTE de energía a los pines VCC / No conecte más de una fuente de alimentación a dos o más pines VCC. Por ejemplo, si está utilizando ESC con BEC, luego retire el cable ROJO central de todos los conectores ESC excepto uno.
• No conecte GND, VCC o 3.3v entre sí (cortocircuito).
• No conecte GND, VCC o 3,3 V a ninguna entrada o salida a menos que se indique específicamente.
• No conecte ninguna entrada o salida a ninguna otra entrada o salida a menos que se especifique lo contrario.
fijado.
• La fuente de alimentación de 3,3 V es solo para uso de baja corriente. 100 mA MÁX.
• No permita que entre suciedad, polvo, pegamento, etc. en el sensor de presión (barómetro).
• Mantenga los imanes alejados del controlador de vuelo.
ADVERTENCIAS
CONSEJOS GENERALES
Siga los consejos a continuación para obtener el mejor rendimiento y una mayor vida útil de su controlador de vuelo:
• Aplique resina/pegamento para reforzar los conectores JST-SH: ayuda si su aeronave se estrella.
• Se recomienda utilizar una caja o recinto para el controlador de vuelo.
• Instale espuma de celda abierta debajo del sensor de presión; coloque un poco entre el FC y marco.
• Coloque los cables del motor/batería lo más lejos posible del sensor de la brújula (magnetómetro). lo más posible.
• Instale los pines del puente BOOT solo si los necesita.
• Se recomienda el uso de conectores de pines codificados por colores (no incluidos), especialmente para VBAT. encabezados.
• Haga todo lo posible para evitar que las vibraciones lleguen al sensor acelerómetro/giroscopio.
Especificaciones:
* Placa de 36x36 mm con orificios de montaje de 30,5 mm.
* Procesador STM32F3.
* Acelerómetro/giroscopio MPU6050
* Toma MicroUSB.
* 4 conectores JST-SH de 4 pines (I2C, SWD, 2xUART)
* 2 conectores JST-SH de 8 pines (PPM, PWM, SERIE RX, GPIO, ADC, 3 V, 5 V, GND)
* 8 orificios pasantes de 3 pines para conectores de pines para conexiones ESC/Servo.
* 2 orificios pasantes de 4 pines para conectores de pines para 2 puertos seriales.
* 2 orificios pasantes de 2 pines para conectores de voltaje de batería y zumbador.


Especificaciones del controlador de vuelo F4 V3S Plus:
Firmware: OMNIBUSF4SD
Tamaño: 36x36mm
Orificios de montaje: 30,5 x 30,5 mm
MCU STM32 F405
Soporte de Dshot
OSD de arrastrar y soltar configurado a través de Betaflight
Unidad de procesamiento central: MPU6500 / MPU6000 (Enviar al azar)
Puertos SBUS/PPM y Spketrum DSMX
Caja negra de tarjetas microSD
Baro (BMP280)
BEC de 5 V 3 A y 9 V 3 A
Filtros de vídeo integrados (solo 5 V a VTX y cámara)
Con un procesador F4, OSD Betaflight integrado, MicroSD Black Box, 5v3a sbec, filtro de video, sintonizará los PID con su transmisor y
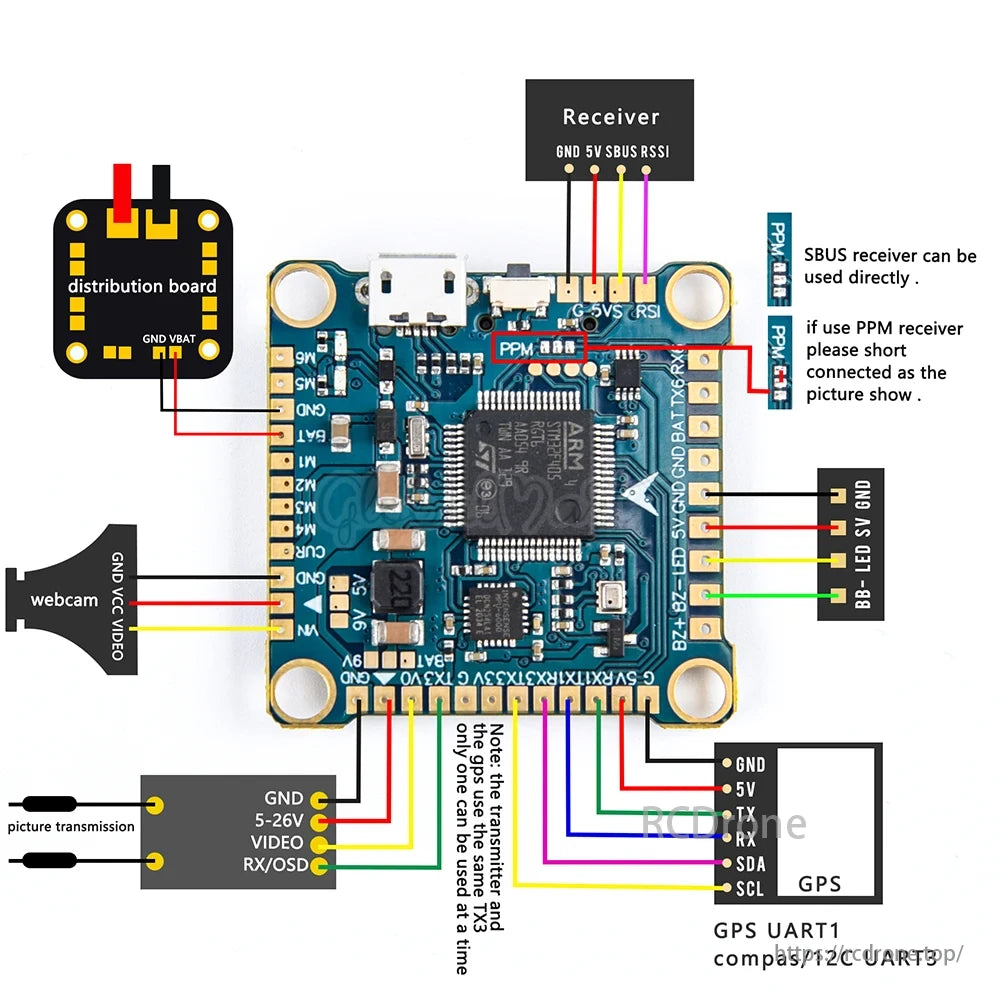
Diagrama de cableado del dron FPV QAV250. Conecta la placa de distribución, la cámara web, la transmisión de imágenes, el receptor (SBUS/PPM) y el GPS. Destaca el UART1 para GPS y el UART3 para brújula/I2C.

Controlador de vuelo F4 V3S Plus para dron FPV QAV250. Cuenta con puerto USB, múltiples conectores y pines etiquetados para una fácil integración y control.
Parámetros del producto:
MCU: STM32F405RGT6 168 MHz
Giroscopio: Mpu6500
Barómetro: Bmp280
OSD: Betaflight SPI OSD DJI HD OSD (UART5)
Caja negra: 16 MB
6x UARTs: UART 1/2/3/4/5/6
4 salidas PWM
1x I2C
2 LED para ESTADO FC (azul), indicador de 3,3 V (rojo), indicador de 5 V (rojo) e indicador de 9 V (rojo)
USB tipo C (USB 2.0)
1 conector JST-SH1.0 de 8 pines (Gnd/Vbat/S1/S2/S3/S4/Curr/Rx3)
1 conector JST-SH1.0 de 6 pines (9 V/GND/T5/R5/GND/R2)
Alimentación filtrada VTX de 9 V
El OSD DJI FPV es compatible con cualquier UART de repuesto
LED: 4 pads LED independientes, compatible con salida de lámpara de programación WS2812.
Receptor: Compatible con receptores Sbus, crsf, ibus, SBUS y XBUS.
La entrada del receptor predeterminada es UART2 (puede soldar ELRS RX en UART2).
Potencia: Voltaje de entrada: 3-6S
BEC: el BEC de doble canal de 5 V/10 V 3 A máx. admite un suministro de energía estable en el lado del cielo de DJI
LDO 3,3 V: Máx. 1 A
Firmware FC: Firmware de BetaFlight: DAKEFPVF405
Firmware de INAV: DAKEFPVF405
Montaje:
Tamaño de instalación: 30,5 mm × 30,5 mm El orificio de instalación es M4 y admite la instalación de la columna de amortiguación.
Tamaño externo 36 mm × 36 mm
Peso del control de vuelo: 6,9 g
Sensor de voltaje a bordo del control de vuelo.



Motor RS2205 de 2300 kv:
Nota: Debido a los diferentes lotes de producción, hay dos tipos de Diseño del motor, enviaremos el motor al azar.

Cuatro motores para drones QAV250 FPV de Ready Tosky, con diseño en negro y rojo con cableado visible para el montaje del dron.

Nota: Hay dos tipos de Littlebee 30A ESC, los enviaremos al azar.

Cuatro ESC OPTO LITTLEBEE 30A-S BLHeli_S favoritos son compatibles con baterías LiPo de 2 a 6S. Presentan un diseño compacto con conectores chapados en oro. Los cables negro y naranja indican las conexiones de alimentación. Estos controladores electrónicos de velocidad regulan la velocidad del motor en drones FPV, como el QAV250, lo que garantiza un control preciso y un rendimiento eficiente. Su diseño elegante y robusta construcción los convierten en fiables para carreras de drones de alto rendimiento y fotografía aérea. Ideales para entusiastas que buscan calidad y rendimiento.

ESC BLHeli S favoritos para el dron FPV QAV250. LittleBee-Spring 30A, compatible con Dshot, compatible con baterías LiPo 2-6S. Incluye cuatro unidades con cables rojo, negro y blanco. Diseño compacto para un rendimiento eficiente.

ESC LIPO Dshot BLHeli S LittleBee-Spring30A 2-6S favorito con cables rojo, negro y blanco para dron QAV250 FPV.

Related Collections







