



Controlador de vuelo RadioLink CrossFlight – Estabilidad tipo Mini Pix, 10 canales PWM, OSD integrado, compatible con multirrotores, aviones, coches y barcos
Controlador de vuelo RadioLink CrossFlight – Estabilidad tipo Mini Pix, 10 canales PWM, OSD integrado, compatible con multirrotores, aviones, coches y barcos
RadioLink
No se pudo cargar la disponibilidad de retiro
Descripción
El Controlador de Vuelo CrossFlight de RadioLink ofrece un rendimiento a nivel Mini Pix en un factor de forma compacto de solo 39.7×39.7×13mm y pesa solo 39g. Con soporte para 10 canales de salida PWM, módulo OSD integrado, y avanzado amortiguamiento de vibraciones basado en software, proporciona una estabilidad y precisión de vuelo superiores para multirotores, drones de carreras micro, aeronaves de ala fija, coches RC, barcos, submarinos y más. El firmware de código abierto está disponible en GitHub, lo que lo hace ideal para desarrolladores que buscan flexibilidad y personalización.
Características Clave
-
Tamaño Mini (39.7×39.7×13mm), Ligero (~39g)
Perfecto para drones compactos, de alta velocidad o cinematográficos. -
Software de Amortiguación de Vibraciones (Mantenimiento de Altitud Tan Estable Como Mini Pix)
Elimina la necesidad de soportes que absorben vibraciones, asegurando datos de sensor precisos para un vuelo estable en cualquier condición. -
Módulo OSD Integrado
Visualización en tiempo real de datos de vuelo, incluyendo GPS, voltaje, corriente, velocidad del viento y ruta de regreso, compatible con ArduPilot. -
10 Canales de Salida PWM
Soporta configuraciones flexibles de motores y servos para aplicaciones complejas de UAV. -
Sistema de Pruebas de Automatización
Asegura un control de calidad rápido y confiable, reduciendo el tiempo de prueba de ~19 minutos (manual) a menos de 5 minutos. -
Compatibilidad con Ecosistemas Robustos
Compatible con registro en tarjeta TF, módulos GPS/ultrasonido, módulos de telemetría y módulos de potencia. -
Algoritmo Avanzado de Filtrado de Kalman
Mejora la precisión de navegación para drones autónomos y vehículos agrícolas, comprobado en proyectos cinematográficos e industriales.
Especificaciones
|
Peso & Dimensión
|
Dimensión
|
39.7*39.7*12.1mm (1.56"*1.56"*0.48")
|
|
Peso
|
16.5g(0.58oz), 54g(1.9oz cuando se incluyen todos los cables conectados)
|
|
|
Hardware
|
Procesador
|
HC32F4A0PITB
|
|
Sensor
|
Giroscopio y Acelerómetro
|
BMI270
|
|
Brújula
|
VCM5883L
|
|
|
Barómetro
|
LPS22HB
|
|
|
FRAM
|
Sin FRAM, use la memoria flash interna para almacenar parámetros, 2617 puntos de referencia para multirrotores y 2623 puntos de referencia para aviones, coches y barcos. |
|
|
Buzzer
|
1
|
|
|
Interruptor
|
Ninguno
|
|
|
Conector
|
Tipo
|
JST GH1.25 Conector
|
|
Salida PWM
|
10 Salidas PWM
|
|
|
UART Mavlink
|
2(sin CTSRTS)
|
|
|
Puerto USB
|
1(Type-C)
|
|
|
Puerto GPS UART/I2C
|
1
|
|
|
Entrada de Señal
|
PPM/SBUS/CRSF
|
|
|
Salida RSSI
|
Soporte
|
|
|
Módulo OSD
|
Módulo OSD Integrado
|
|
|
Protocolo ESC
|
PWM, DShot, y Protocolo OneShot
|
|
|
RTK
|
Soporte
|
|
|
Reurbanización
|
Soporte
|
|
|
Módulo de Potencia
Especificaciones |
Peso
|
16g(0.56oz) sin cable
|
|
Voltaje de entrada
|
2-12S
|
|
|
Corriente de detección máxima
|
90A
|
|
|
Voltaje de salida (BEC)
|
5.3V±0.2V
|
|
|
Corriente de salida (BEC)
|
2A
|
|
|
ESC único Máxima
Corriente de detección |
22.5A
|
|
|
Modelos adaptables
|
||
|
Parámetros de operación
|
USB Voltaje
|
5V±0.3V
|
|
Servo Voltaje
|
No aplicable
|
|
|
Temperatura de operación
|
-30~85℃
|
Aplicaciones
-
Drones multirrotor y de carreras micro (e.g. 210, 220, 250 marcos)
-
Aeronaves de ala fija
-
Helicópteros
-
Autos y botes RC
-
Submarinos y rastreadores de radar
-
UAVs agrícolas
-
Vehículos terrestres autónomos
-
Drones cinematográficos para grabaciones de acrobacias o supercoches
Contenido del paquete
-
CrossFlight Controlador de vuelo ×1
-
Módulo de potencia (soporte de 2–12S) ×1
-
Buzzer ×1
-
Placa de transferencia I2C ×1
-
LED indicador de estado del FC ×1
-
Tarjeta TF 4G (MicroSD) ×1
-
Cable de buzzer y receptor ×1
Módulo de alimentación Cable ×1
-
Cable de transferencia I2C ×1
-
Cable de puerto OSD ×1
-
Cable TELEM1&2 ×1
-
Cable LED de estado FC ×1
-
Cinta adhesiva de doble cara ×1
-
Cable Tipo-C ×1
-
Manual del usuario ×1
-
Caja de embalaje ×1
Destacados
-
Sistema de pruebas automatizadas igual que PIXHAWK/Mini Pix garantiza rendimiento y calidad.
-
Diseñado tanto para drones de alta velocidad como para maquinaria agrícola precisa.
-
Cadena de suministro confiable con más de 20 años de desarrollo, no afectada por la escasez de chips durante 2020–2022.
Detalles

CrossFlight ofrece amortiguación de vibraciones, código fuente en GitHub. Soporta multirrotores, drones, aviones, coches, barcos, submarinos, rastreadores de radar. Incluye OSD, 10 salidas PWM, pruebas de automatización, soporte técnico. Rentable.
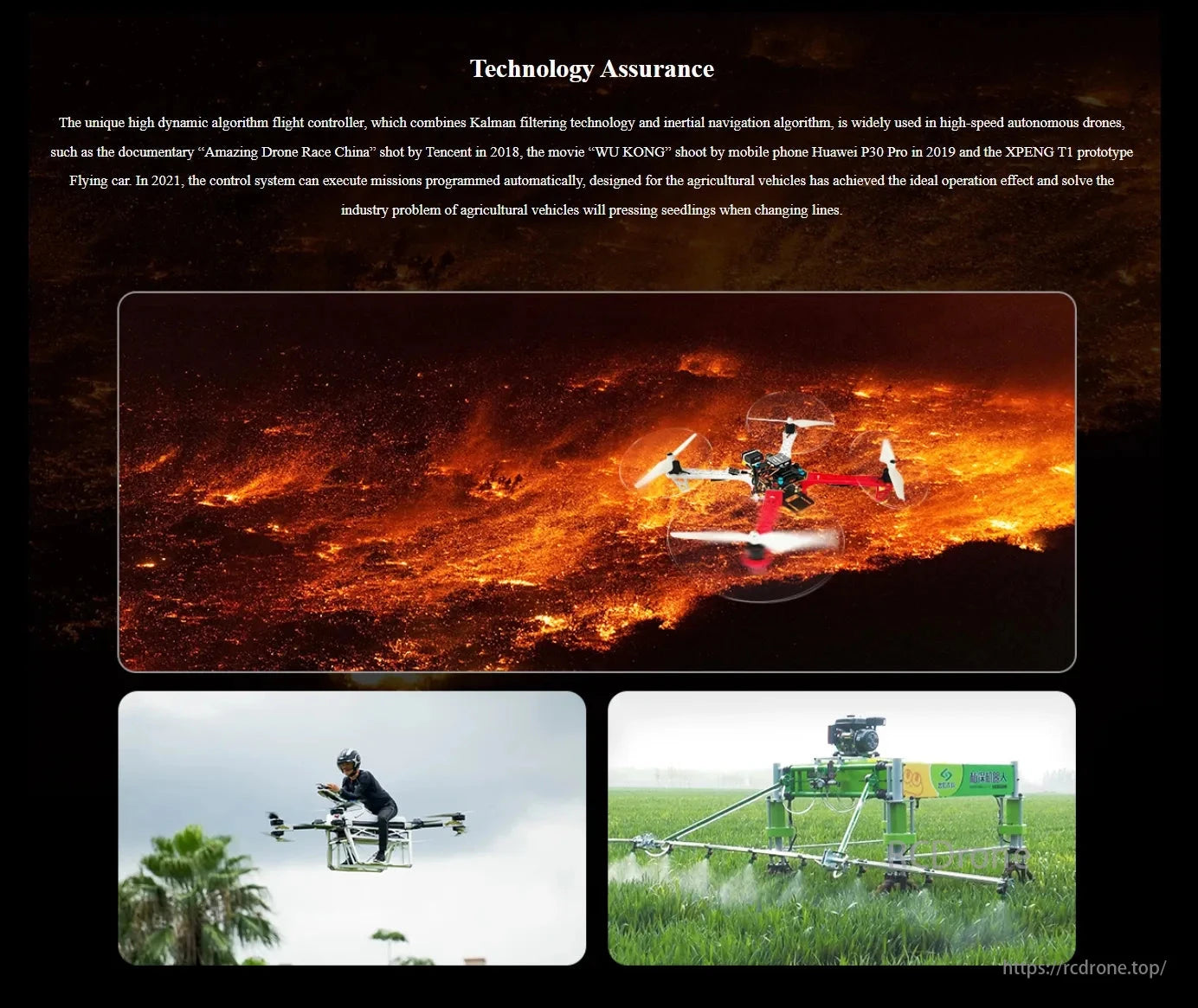
Aseguramiento de Tecnología. Controlador de vuelo de algoritmo dinámico único combina filtrado de Kalman y navegación inercial, utilizado en drones autónomos, películas y vehículos agrícolas para un control y automatización precisos.

Garantía de Suministro: 20 años en la industria, 10 en control de vuelo. Suministro estable de PIXHAWK, Mini Pix, Byme-A/D a pesar de la escasez de chips.Actualizaciones continuas garantizadas. (40 palabras)
El Sistema de Pruebas de Software de Automatización garantiza la calidad para CrossFlight. Automatiza pruebas desde sensores hasta puertos, superando los métodos manuales para una eficiencia superior y fiabilidad funcional.
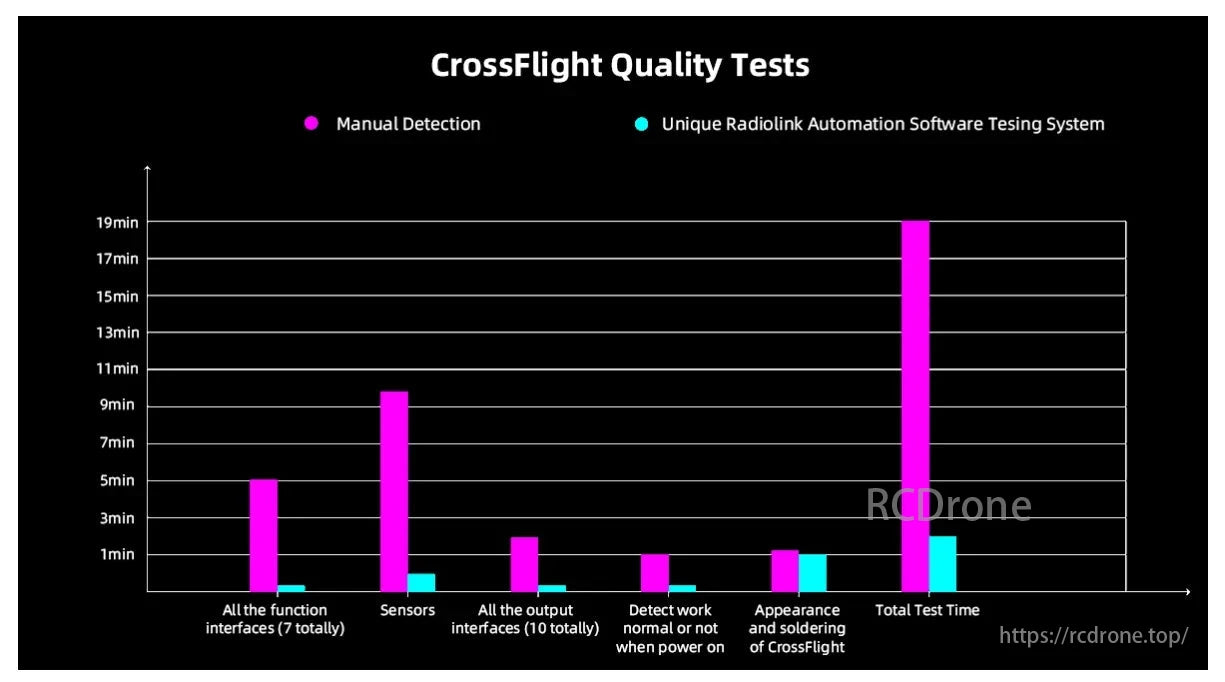
Las Pruebas de Calidad de CrossFlight comparan la detección manual y los tiempos del Sistema de Pruebas de Software de Automatización Unique Radiolink para interfaces de función, sensores, interfaces de salida, detección de encendido, apariencia, soldadura y tiempo total de prueba.
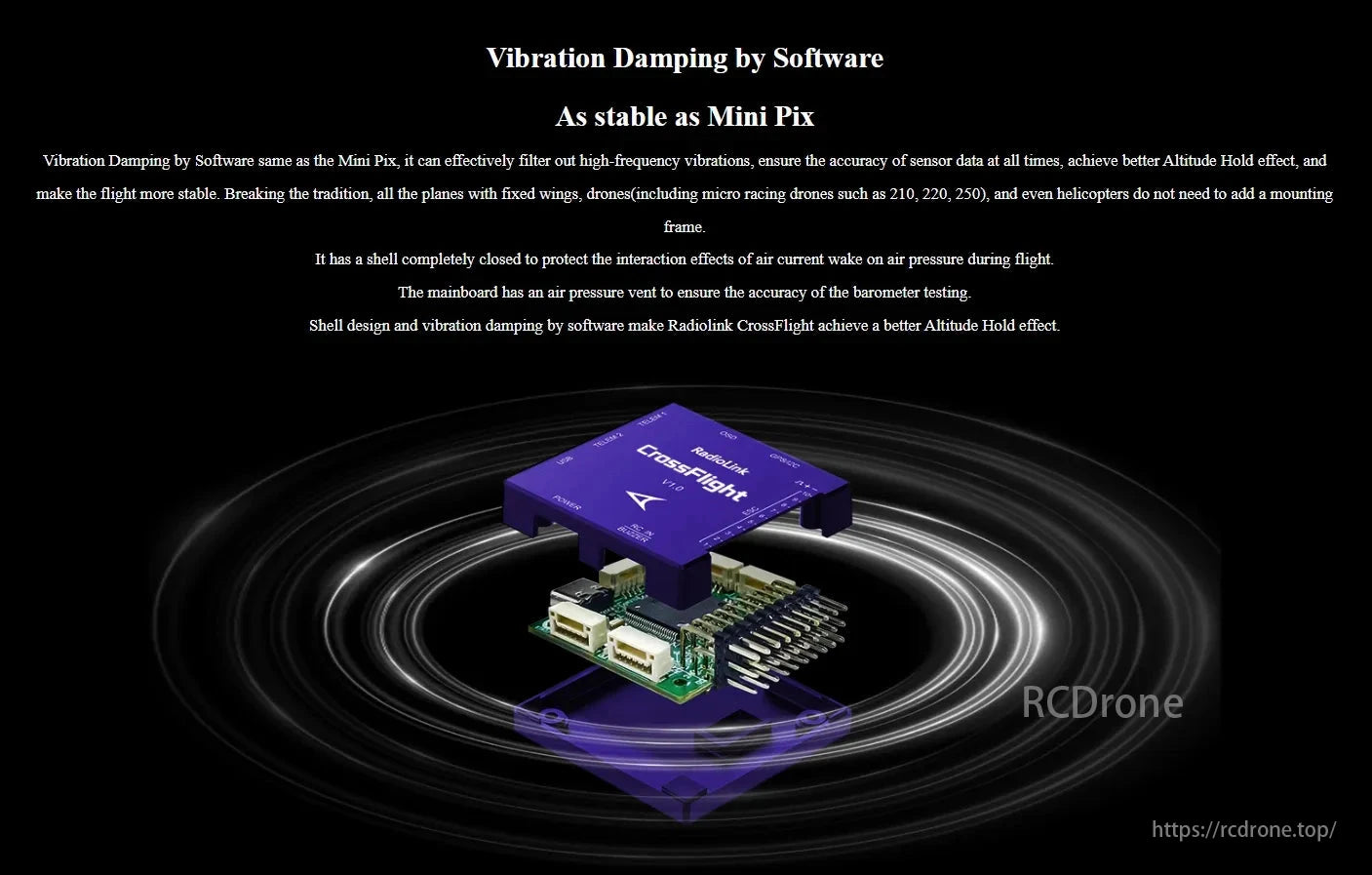
El Controlador de Vuelo CrossFlight proporciona amortiguación de vibraciones basada en software para vuelos estables y sensores precisos. Su carcasa protege contra la presión del aire, mejorando la retención de altitud.
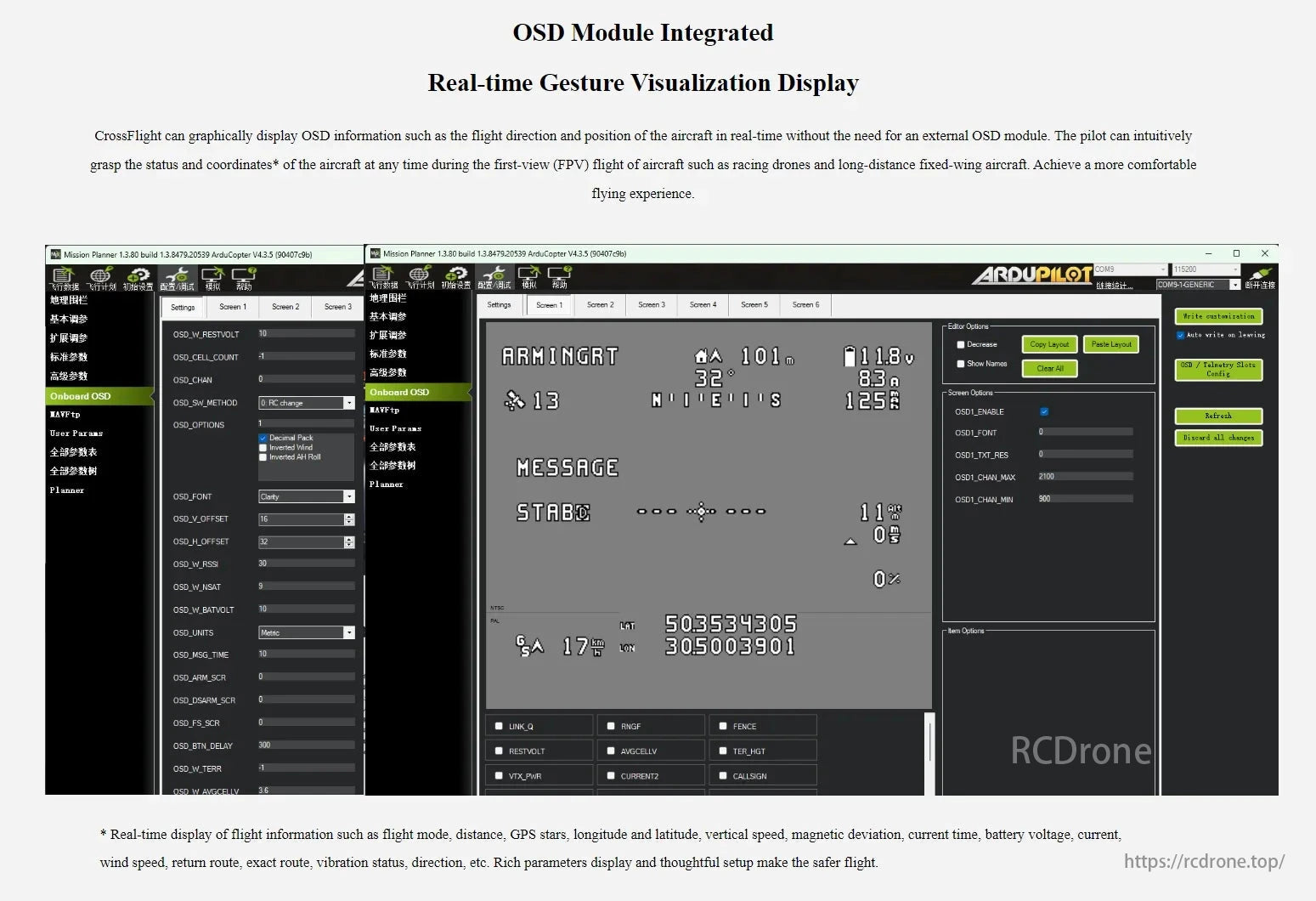
CrossFlight proporciona datos de vuelo en tiempo real, incluyendo dirección, posición, estado y coordenadas para vuelos FPV, mejorando la experiencia del piloto con información detallada.
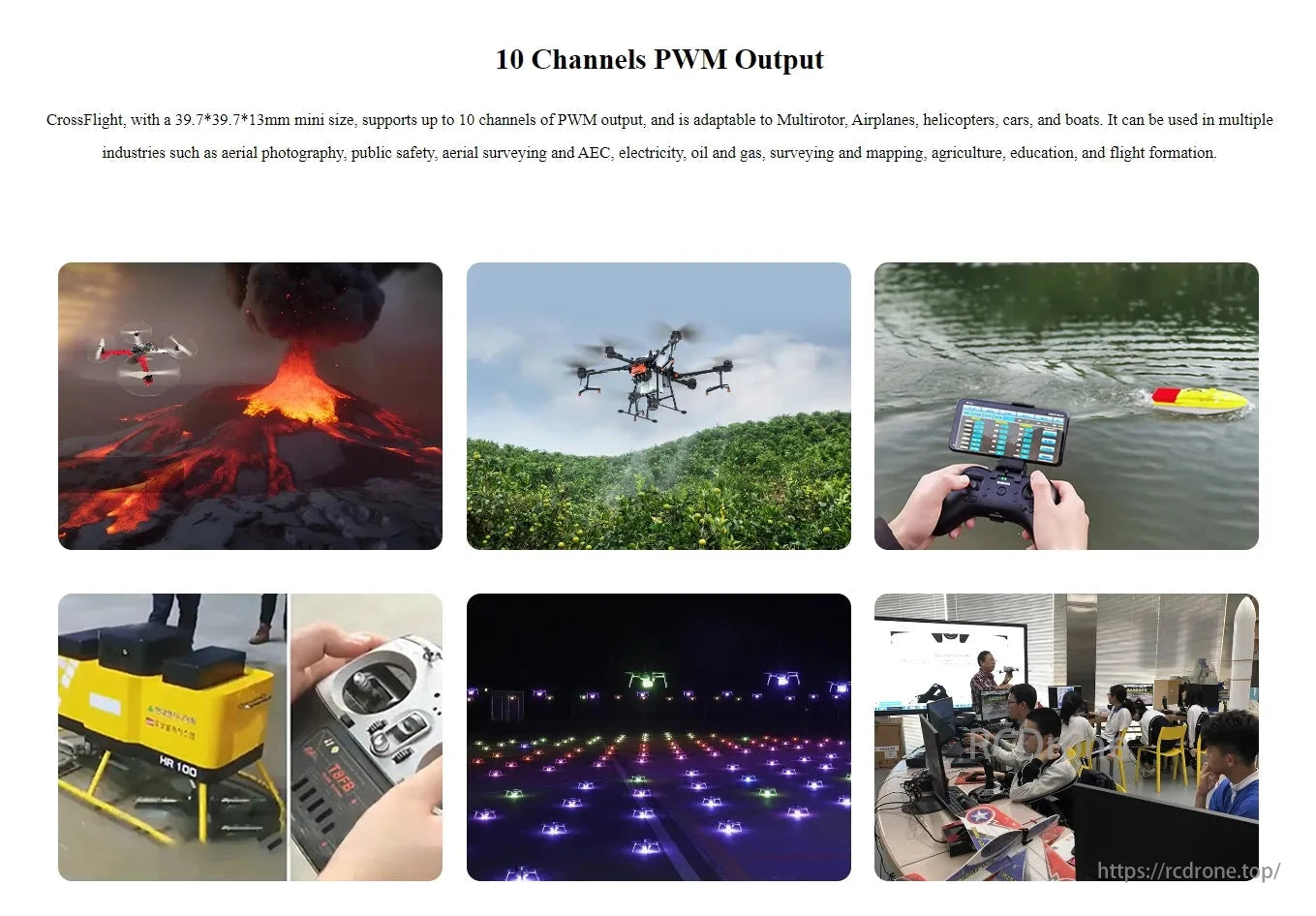
CrossFlight es un controlador de vuelo compacto de 39.7×39.7×13mm con hasta 10 salidas PWM. Funciona para multirrotores, aviones, helicópteros, coches y barcos. Úselo en fotografía aérea, seguridad pública, topografía, AEC, energía, agricultura, educación y vuelos en formación. Se aplica al monitoreo de volcanes, fumigación de cultivos, control de barcos, operaciones en tierra, formaciones de drones nocturnas y aprendizaje en el aula.

Tamaño mini como F4, dimensiones 39.7x39.7x13mm. Elimina interfaces redundantes y simplifica la instalación. El peso total con cables es de 54g, reduciendo el peso total de la máquina para un tiempo de vuelo prolongado. Ideal para drones de fotografía aérea pequeños y de alta velocidad utilizados en esquí acrobático y videos promocionales de supercoches. El controlador de vuelo RadioLink CrossFlight V1.0 pesa aproximadamente 39g, ofreciendo un diseño compacto para un rendimiento eficiente en diversas aplicaciones.
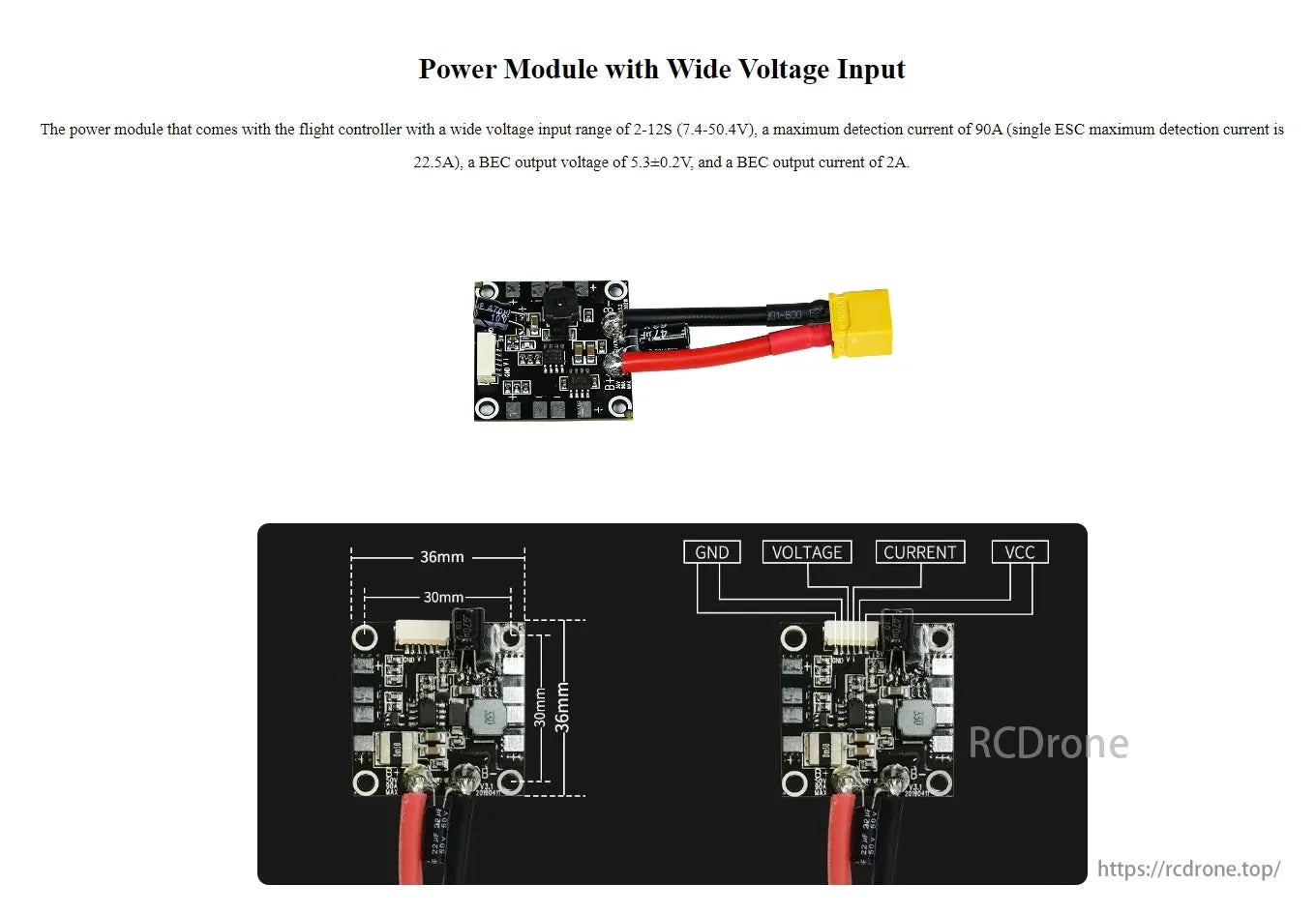
Módulo de Potencia con Entrada de Voltaje Amplia. Soporta 2-12S (7.4-50.4V), corriente de detección máxima 90A, salida BEC 5.3±0.2V, 2A. Dimensiones: 36mm x 30mm. Conecta GND, VOLTAJE, CORRIENTE, VCC.
La Garantía de Uso asegura una fácil instalación y configuración de parámetros para varios modelos. Se ofrece orientación completa, incluyendo ajuste PID y visualización de registros, en plataformas oficiales como Facebook, YouTube e Instagram.
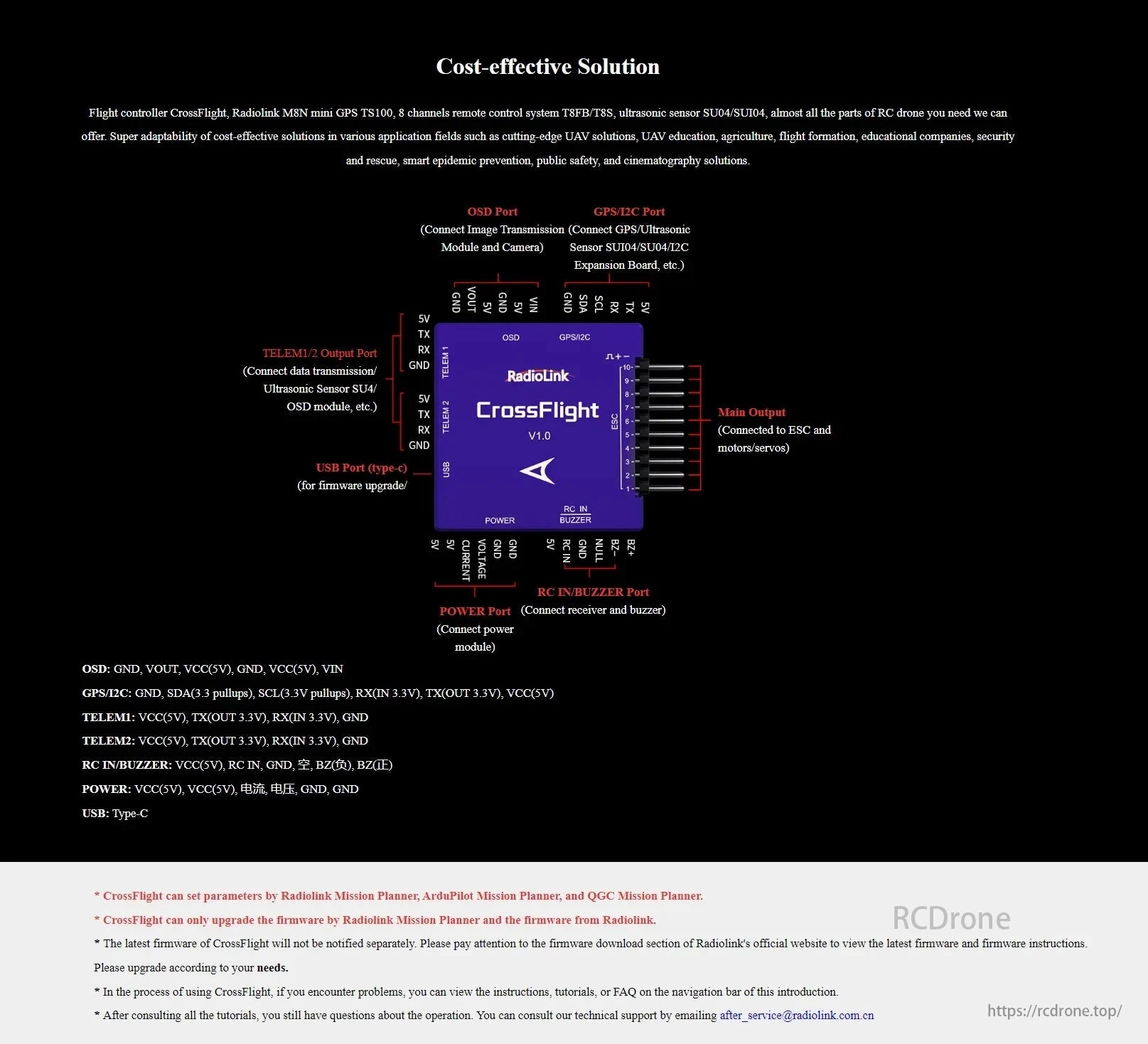
El Controlador de Vuelo RadioLink CrossFlight ofrece soluciones rentables para drones RC. Las características incluyen GPS, puertos de telemetría, USB para actualizaciones de firmware y conexiones para ESCs, servos y sensores. Soporta diversas aplicaciones como educación UAV y seguridad.
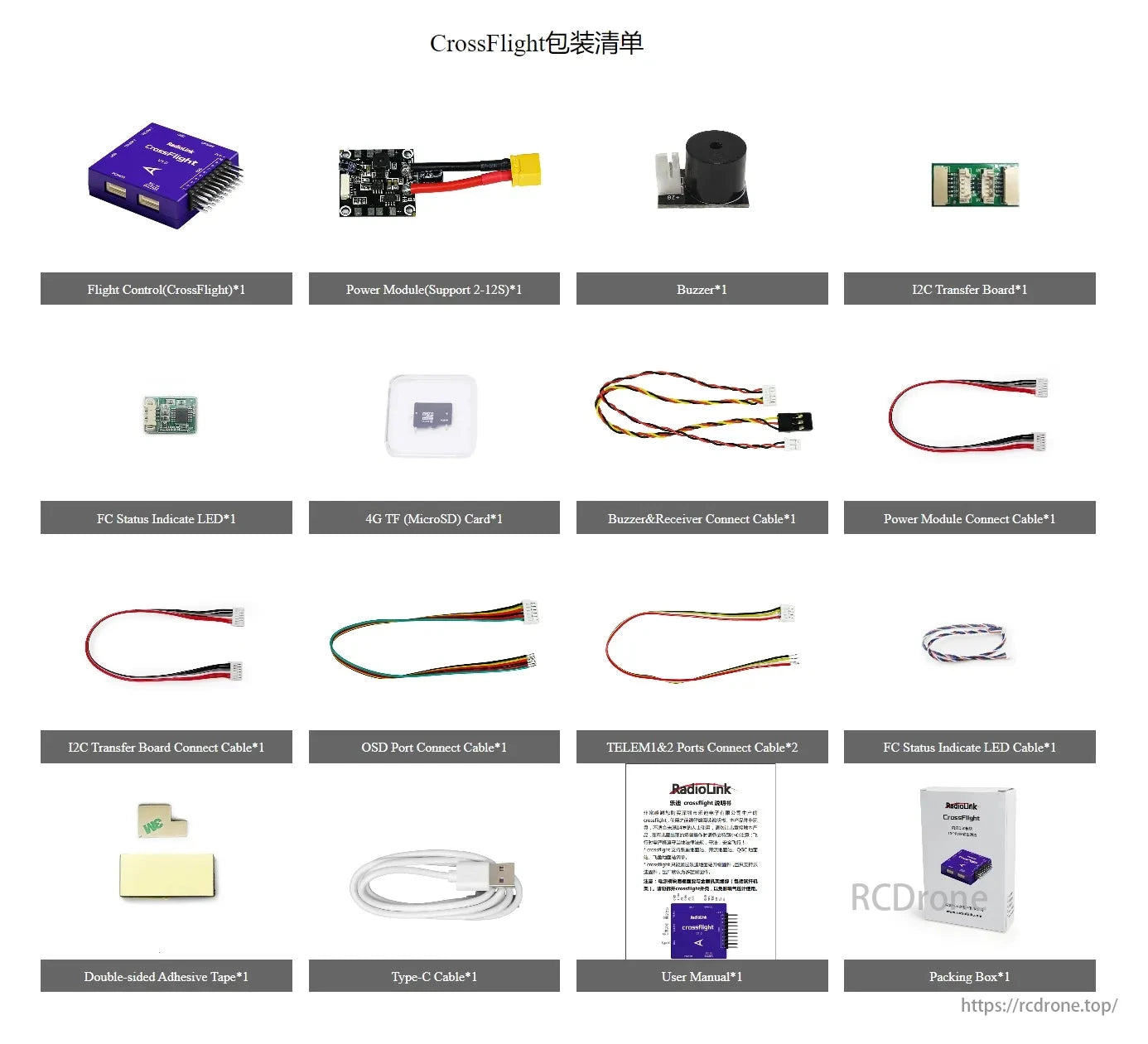
El paquete CrossFlight incluye: Control de Vuelo, Módulo de Potencia, Zumbador, Placa de Transferencia I2C, LED de Estado del FC, Tarjeta TF de 4G, Cables de Conexión (Zumbador&Receptor, Módulo de Potencia, Transferencia I2C, Puerto OSD, Puertos TELEM1&2), Cinta Doble Cara, Cable Tipo-C, Manual del Usuario, Caja de Embalaje.
Related Collections



