




ROBOTERA XHAND 1 Mano Robótica - 12 DoF, puntas táctiles 270°, agarre 80N, levanta 25 kg, EtherCAT/RS485, compatible con ROS
ROBOTERA XHAND 1 Mano Robótica - 12 DoF, puntas táctiles 270°, agarre 80N, levanta 25 kg, EtherCAT/RS485, compatible con ROS
ROBOTERA
No se pudo cargar la disponibilidad de retiro
Resumen
ROBOTERA XHAND 1 es una mano robótica de cinco dedos con módulos de articulación de accionamiento directo completo y 12 grados de libertad activos. La mano tiene un tamaño similar al de una mano humana (191 mm x 94 mm x 47 mm) y está diseñada para una manipulación hábil con detección táctil de alta resolución, una robusta fuerza de agarre y interfaces amigables para desarrolladores para la investigación e integración en robótica.
Características Clave
- Arquitectura de accionamiento directo completo con módulos de articulación controlados por fuerza y con engranajes integrados (3 en el pulgar; 9 en los otros cuatro dedos).
- 12 grados de libertad totalmente activos; oscilación lateral del dedo índice de +/-15° para manipulación compleja en la mano.
- Alto rendimiento de agarre: fuerza en la yema del dedo 15N; fuerza de agarre máxima 80N; peso máximo de agarre de hasta 25 Kg (palma hacia arriba) y 16 Kg (palma hacia la izquierda).
- Accionamiento de alta velocidad que soporta >2Hz de repetición de apertura/cierre; se ha demostrado clics de dedo de hasta 10 CPS (Clics Por Segundo).
- 270° cobertura táctil en la yema del dedo con cinco sensores de matriz táctil tridimensional; resolución de toda la mano 12x10 por yema del dedo x 5.
- Detección de fuerza tridimensional que incluye fuerzas tangenciales (X e Y); precisión de reposicionamiento de la yema del dedo +/-0.20 mm.
- Con capacidad de retroalimentación con amortiguación <= 0.1 Nm; control de fuerza en bucle de corriente y control de fuerza-posición para una interacción compliant.
- Conectividad amigable para desarrolladores: EtherCAT y RS485 (USB); compatible con ROS1/ROS2, Ubuntu (Linux), arquitecturas x86 y ARM, TwinCAT y brazos robóticos comunes (incluyendo xARM, Realman, UR).
- Durabilidad calificada para 1,000,000 ciclos de agarre sin carga; temperatura de operación -20°C ~ 60°C.
Para consultas, soporte de integración o compras al por mayor, contacte [email protected] or visite https://rcdrone.top/.
Especificaciones
| Parámetro | Valor |
|---|---|
| Peso | 1100 g |
| Dimensiones (L x W x T) | 191 mm x 94 mm x 47 mm (El tamaño de la mano de un adulto) |
| DoF Activo (Total) | 12 |
| DoF Pasivo (Total) | 0 |
| Asignación de DoF | Pulgar x 3; Dedo Índice x 3; Dedo Medio x 2; Dedo Anular x 2; Dedo Meñique x 2 |
| Actuación/Transmisión del Pulgar | Módulo de articulación controlado por fuerza de 3 engranajes |
| Actuación/Transmisión de Cuatro Dedos | Módulo de articulación controlado por fuerza de 9 engranajes |
| Configuración de la Yema del Dedo | Yemas de Dedo Redondas o Redondeadas |
| Oscilación Lateral | -15°~+15° (Índice) |
| Precisión de Posicionamiento de Repetición con la Punta de los Dedos | +/− 0.20 mm |
| Modos de Control | Control de posición (bajo amortiguamiento/alto amortiguamiento), control de fuerza en bucle de corriente, control de fuerza-posición |
| Fuerza en la Yema del Dedo | 15N |
| Fuerza de Agarre Máxima (mano completa) | 80N |
| Peso Máximo de Agarre (palma izquierda) | 16 Kg |
| Peso Máximo de Agarre (palma hacia arriba) | 25 Kg |
| Oposición Más Lejana del Pulgar | Pequeño Meñique |
| Velocidad de Repetición de Apertura/Cierre | >2Hz |
| Amortiguación de Retroceso (Retrocesible) | <= 0.1 Nm |
| Cobertura Táctil | 270° circunferencia de cinco dedos |
| Número de Sensores Táctiles | Cinco sensores de matriz táctil tridimensional de 270° en cinco yemas de los dedos |
| Resolución Táctil (mano completa) | 12x10 (circunferencia de 270° por yema de dedo) x 5 |
| Dimensiones de Detección Táctil | Detección de fuerza tridimensional (incluyendo fuerzas tangenciales X e Y) |
| Frecuencia de Control de Mano Completa | 83Hz |
| Tasa de Comunicación | EtherCAT: 100MHz; RS485: 3MHz |
| Parámetros de Detección | Yemas de los dedos: 120 fuerzas de perfilado tridimensional; Articulaciones: posición, velocidad, temperatura, corriente (torque) |
| Parámetros de Control | Posición de la articulación; par de la articulación; coeficiente de rigidez de la articulación; coeficiente de amortiguamiento de la articulación |
| Ciclos de agarre sin carga | 1,000,000 ciclos |
| Rango de temperatura de funcionamiento | -20°C ~ 60°C |
| Tensión de trabajo | 24V ~ 72V |
| Corriente estática | 0.15A @48V, 7W |
| Corriente máxima | 2.5A @48V, 120W |
| Interfaz de comunicación | RS485 (USB), EtherCAT |
Aplicaciones
- Teleoperación: soporta teleoperación MR y con guantes; teleoperación Vision Pro; guantes Manus; Pico/Meta Quest.
- Integración de brazo robótico y humanoide: compatible con xARM, Realman, UR y otros brazos robóticos.
- Investigación y simulación: URDF preciso, simulación de detección táctil; adecuado para aprendizaje por refuerzo con Isaac Gym y Mujoco.
- Interacción humano-máquina y operación de herramientas humanas con control de fuerza compliant.
Manuales
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Manual_de_Producto_1.0.pdf
X-Hand_1_Instrucciones_de_Inicio_Rápido_1.0.pdf
Detalles

ROBOTERA XHAND1 mano robótica con accionamiento directo completo, que ofrece verdadera libertad y destreza avanzada.

XHAND1 de ROBOTERA: mano humanoide de cinco dedos con 12 grados de libertad, sensores táctiles de 270° por yema de dedo, fuerza de agarre de 80N, capacidad de carga de 25kg. Diseñada para tareas complejas y manejo de herramientas.

XHAND 1: Primera mano hábil con módulos de accionamiento directo por articulación. Cuenta con motores inalámbricos de alta potencia, reductores de baja amortiguación, codificadores de precisión y módulos de articulación integrados desarrollados internamente para manipulación robótica avanzada.
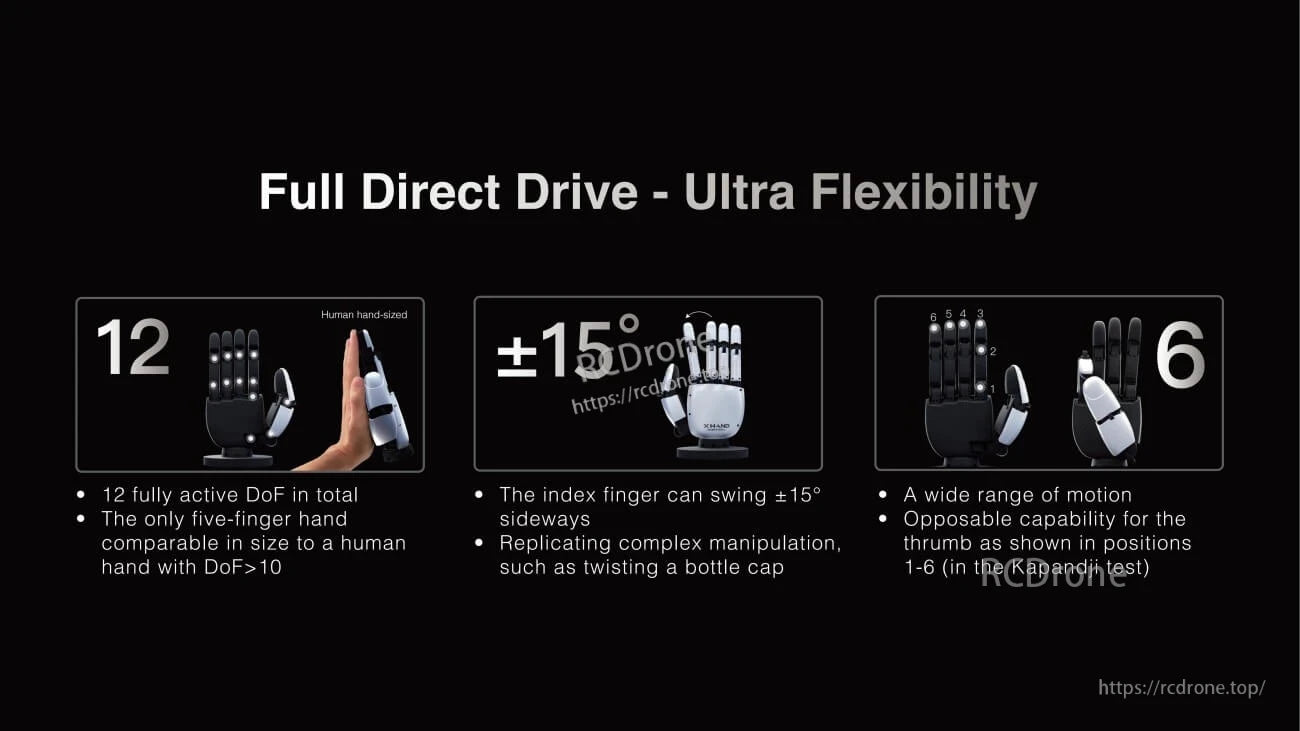
ROBOTERA XHAND 1 es una mano robótica ultra-flexible, del tamaño de un humano, con 12 grados de libertad activos. Su dedo índice se mueve ±15° lateralmente para tareas complejas, y el pulgar ofrece seis posiciones opuestas para una manipulación versátil.

ROBOTERA XHAND 1: carga de 25 kg, fuerza de agarre de 80N, transmisión directa completa, supera soluciones similares basadas en enlaces/tendones.

La mano robótica de transmisión directa completa logra 10 CPS con velocidad impulsada por engranajes, par superior a 1 Nm, superando sistemas de enlaces y tendones para un rendimiento de juego superior.

ROBOTERA XHAND 1 tiene sensores en la punta de los dedos de 270° con >100 puntos y 0.05 N de precisión para detección de fuerza 3D, táctil y de temperatura, asegurando un rendimiento de agarre superior.
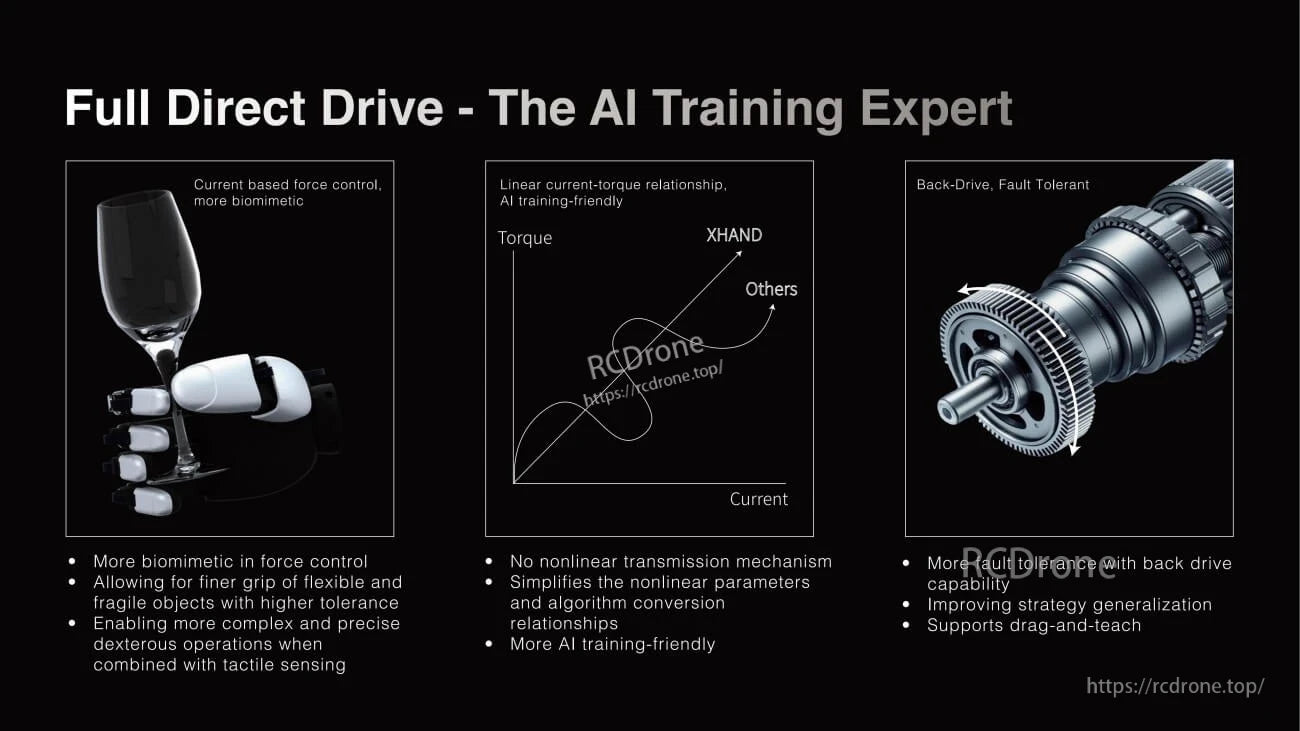
ROBOTERA XHAND 1 ofrece control de fuerza biomimético, respuesta de par-corriente lineal para entrenamiento de IA, y tolerancia a fallos de retroceso, lo que permite un manejo preciso, algoritmos simplificados, soporte de arrastre y enseñanza, y mejora en la generalización de estrategias.
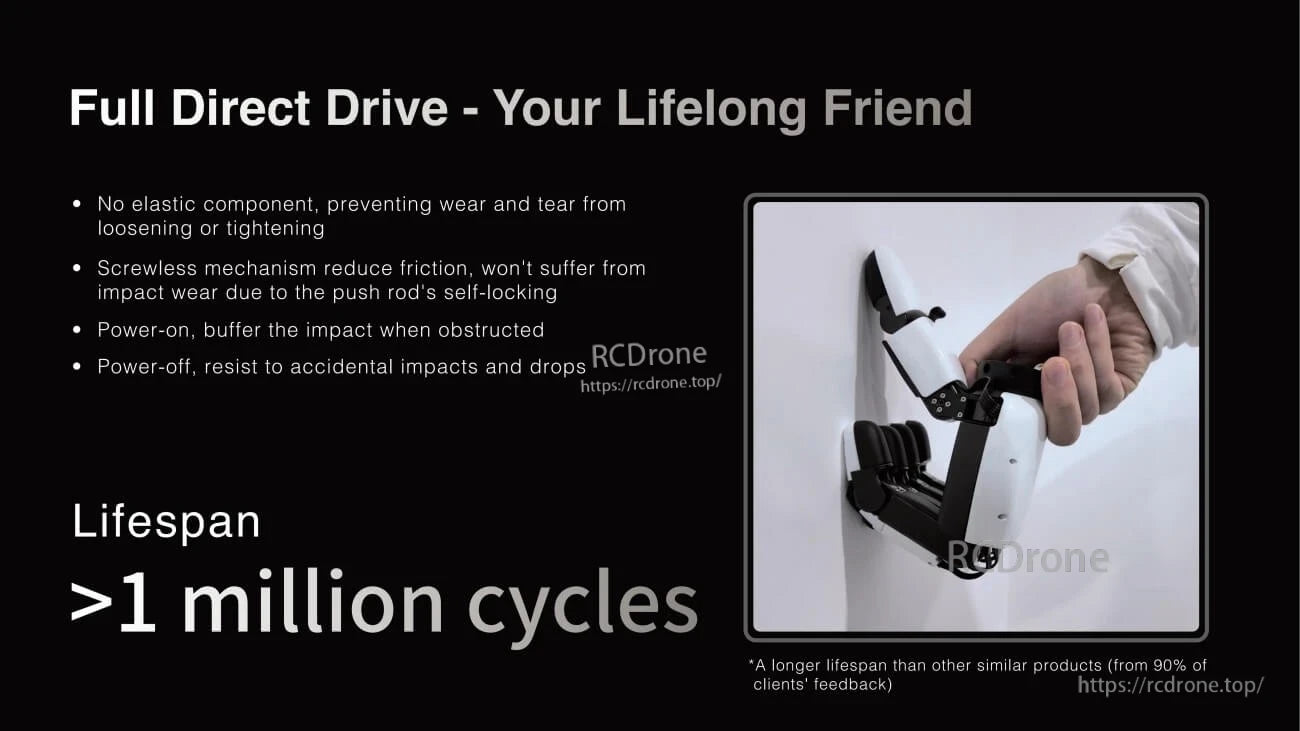
La mano robótica de transmisión directa completa ofrece durabilidad sin partes elásticas ni tornillos, amortiguación de impactos cuando está encendida, resistencia a caídas cuando está apagada y una vida útil que supera un millón de ciclos, superando productos similares según la retroalimentación de los clientes.

ROBOTERA XHAND 1 soporta teleoperación MR y con guantes, compatible con ROS1/ROS2 y Ubuntu en x64/ARM. Presenta EtherCAT/TwinCAT/RS485 para integración con xARM, Realman, brazos robóticos UR. Ofrece modelado URDF preciso y simulación de detección táctil. Diseñada para aplicaciones robóticas amigables para desarrolladores con flexibilidad multiplataforma y protocolos de control avanzados.
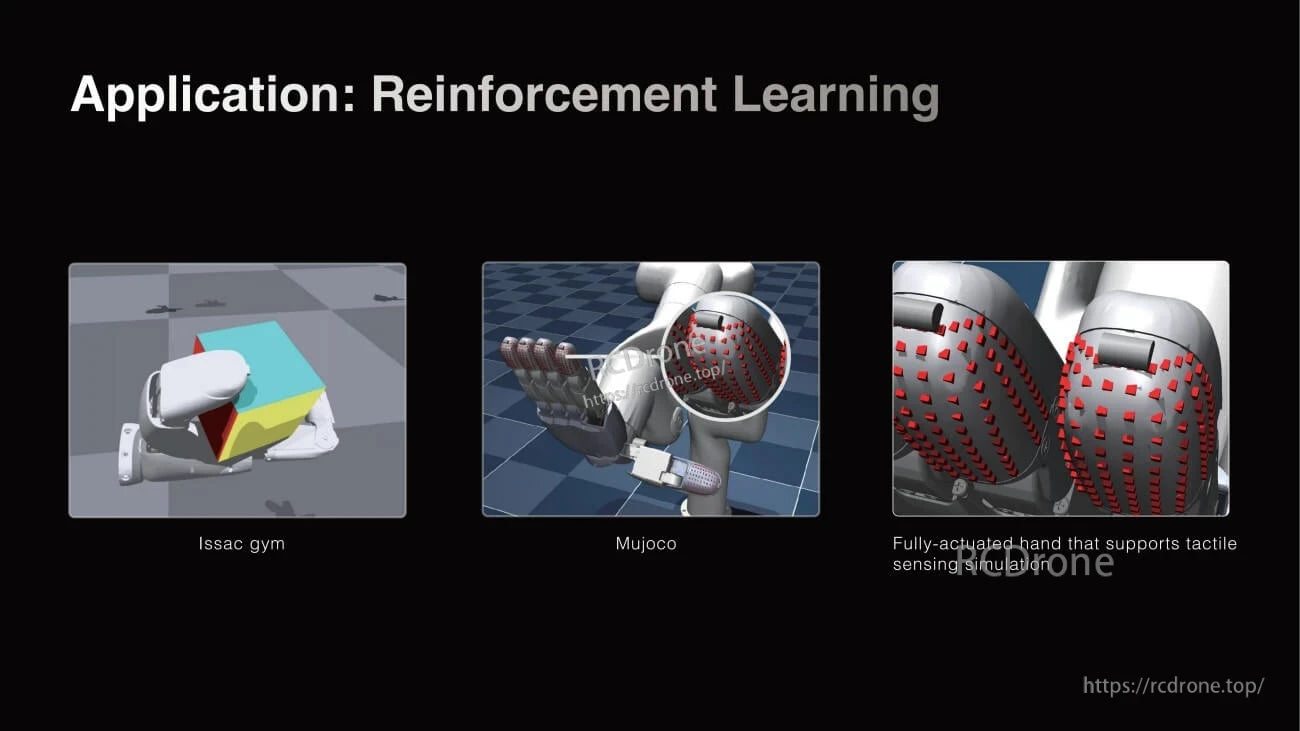
Aplicaciones de aprendizaje por refuerzo: Issac gym, Mujoco y mano totalmente actuada con simulación de detección táctil para control robótico avanzado y entornos de entrenamiento.
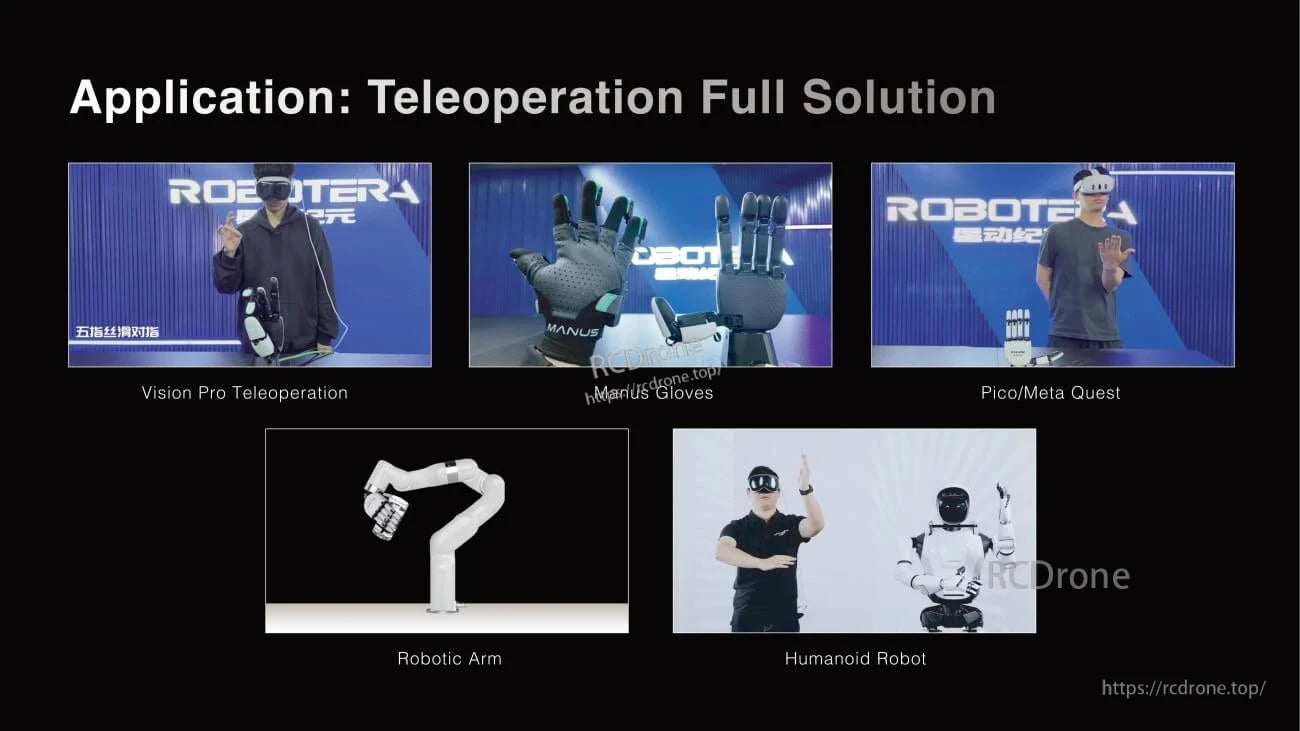
Solución de teleoperación completa que incluye Vision Pro, Manus Gloves, Pico/Meta Quest, brazo robótico y robot humanoide para control remoto avanzado.
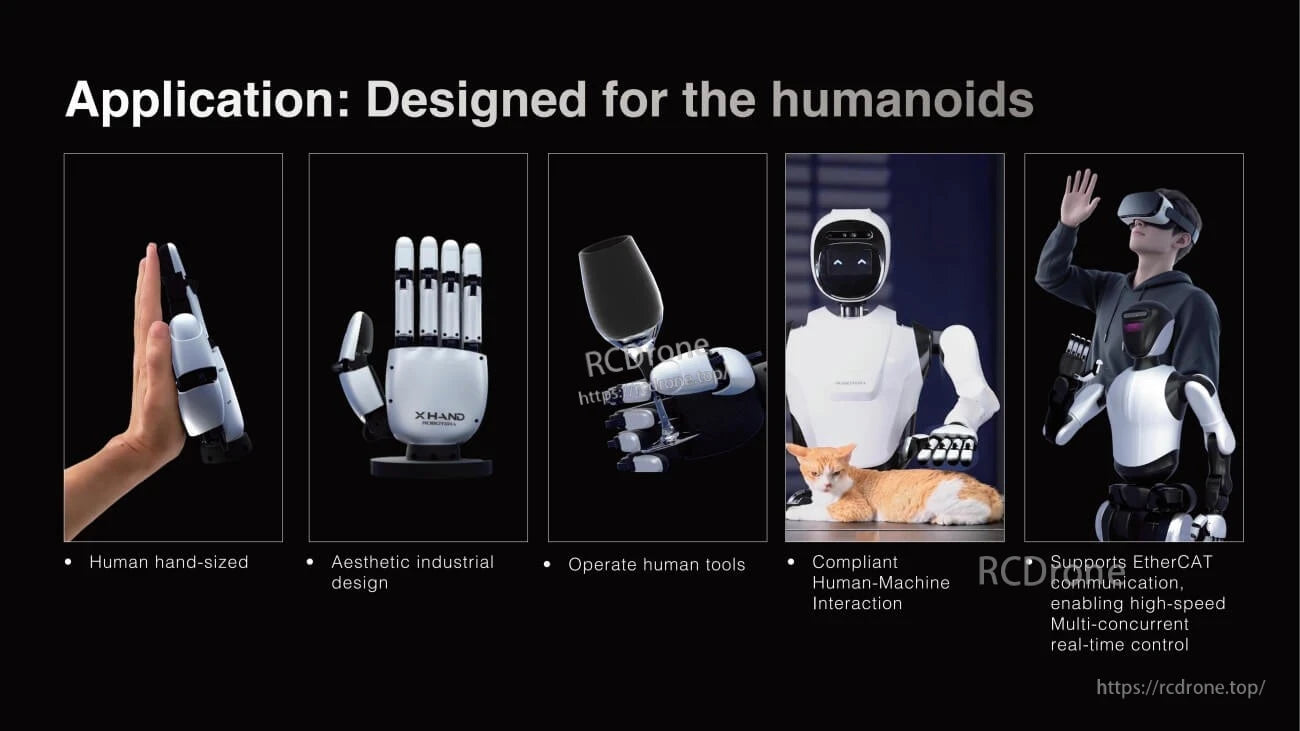
Mano robótica del tamaño de un humano con diseño estético, opera herramientas, permite interacción compliant, soporta EtherCAT para control en tiempo real.
Related Collections




