









ROSMASTER R2 Coche Robot Ackermann ROS2 con Interacción por Voz para Jetson Nano/Orin SUPER/Raspberry Pi 5 (1.8m/s)
ROSMASTER R2 Coche Robot Ackermann ROS2 con Interacción por Voz para Jetson Nano/Orin SUPER/Raspberry Pi 5 (1.8m/s)
Yahboom
No se pudo cargar la disponibilidad de retiro
Descripción general
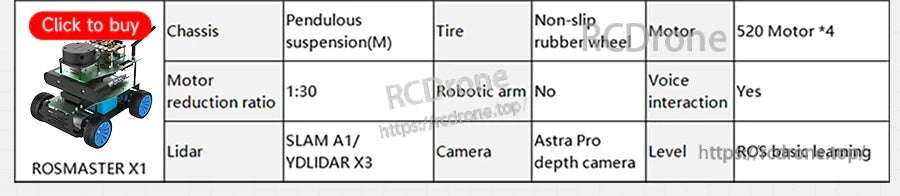
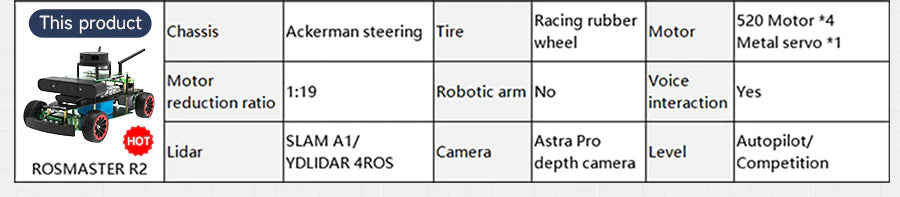
ROSMASTER R2 es un coche robot ROS2 con una estructura de dirección Ackermann y un módulo de interacción por voz con IA. Está desarrollado basado en el sistema ROS2 (también compatible con imágenes de sistema ROS1/ROS2) y es compatible con Jetson NANO (B01/SUB), Jetson Orin NANO SUPER, Jetson Orin NX SUPER y Raspberry Pi 5 como placa de control principal. La velocidad máxima es de 1.8 m/s.
La plataforma está diseñada para el desarrollo y aprendizaje de flujos de trabajo ROS como mapeo/navegación SLAM, planificación de rutas y aplicaciones de visión AI utilizando una cámara de profundidad y LiDAR.
Características clave
- Plataforma de robot ROS2 Ackermann: Desarrollo ROS, navegación de mapeo SLAM, totalmente compatible con ROS2, estructura de dirección Ackermann e interacción por voz robótica.
- Conjunto de hardware listo para sensores: soporta LiDAR y una cámara de profundidad Astra Pro para aplicaciones de mapeo/navegación y profundidad/nube de puntos.
- Temas de software de percepción & de visión AI (según el contenido de aprendizaje): entrenamiento del modelo YOLO, aprendizaje automático de MediaPipe, procesamiento de imágenes con OpenCV, mapeo con ORBSLAM2, mapeo de escenas reales en 3D con RTAB, etiquetas AR, seguimiento de color/KCF, y reconocimiento visual/seguimiento de objetivos.
- Temas de & mapeo de navegación (según el contenido de aprendizaje): Gmapping, Cartographer, visión de mapeo 3D, exploración RRT, mapeo de escaneo LiDAR y evitación dinámica.
- Métodos de control remoto: control mediante app iOS/Android, control con mando inalámbrico, control por teclado y control con sistema ROS; también soporta control basado en Jupyter.
- Detalles del chasis: chasis Ackermann de aleación de aluminio; diseño de barra anti-colisión; neumáticos de goma blanda antideslizante de carreras con forro de esponja incrustado para recuperación.
- Servo de dirección: equipado con un servo inteligente de alto torque de 20KG para la potencia de dirección.
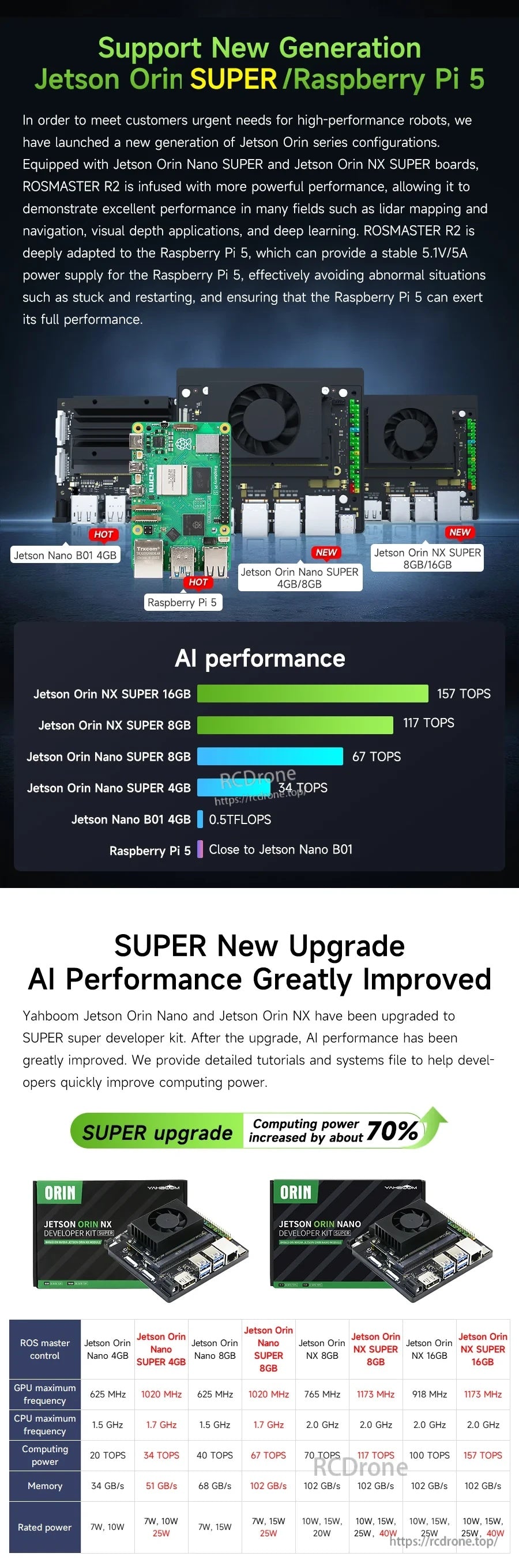
- Soporte para controladores de nueva generación: soporta la serie Jetson Orin SUPER y Raspberry Pi 5; la adaptación de Raspberry Pi 5 incluye un diseño de fuente de alimentación estable de 5.1V/5A.
Especificaciones
| Producto | ROSMASTER R2 Ackermann ROS2 Robot (coche robot) |
| Velocidad máxima | 1.8 m/s |
| Estructura de dirección | Dirección Ackermann |
| Chasis | Chasis de aleación de aluminio Ackermann; barra anti-colisión |
| Neumáticos | Rueda de goma de carreras; neumático antideslizante de goma blanda con forro de esponja incrustado |
| Motores de tracción | Motor 520 *4 |
| Servo de dirección | Servo de metal *1; servo inteligente de alto torque de 20KG |
| Relación de reducción del motor | 1:19 |
| Interacción por voz | Sí |
| Cámara | Cámara de profundidad Astra Pro (la cámara de profundidad Astra Pro Plus se menciona en la comparación de versiones) |
| Opciones de LiDAR | SLAM A1 / YDLIDAR 4ROS |
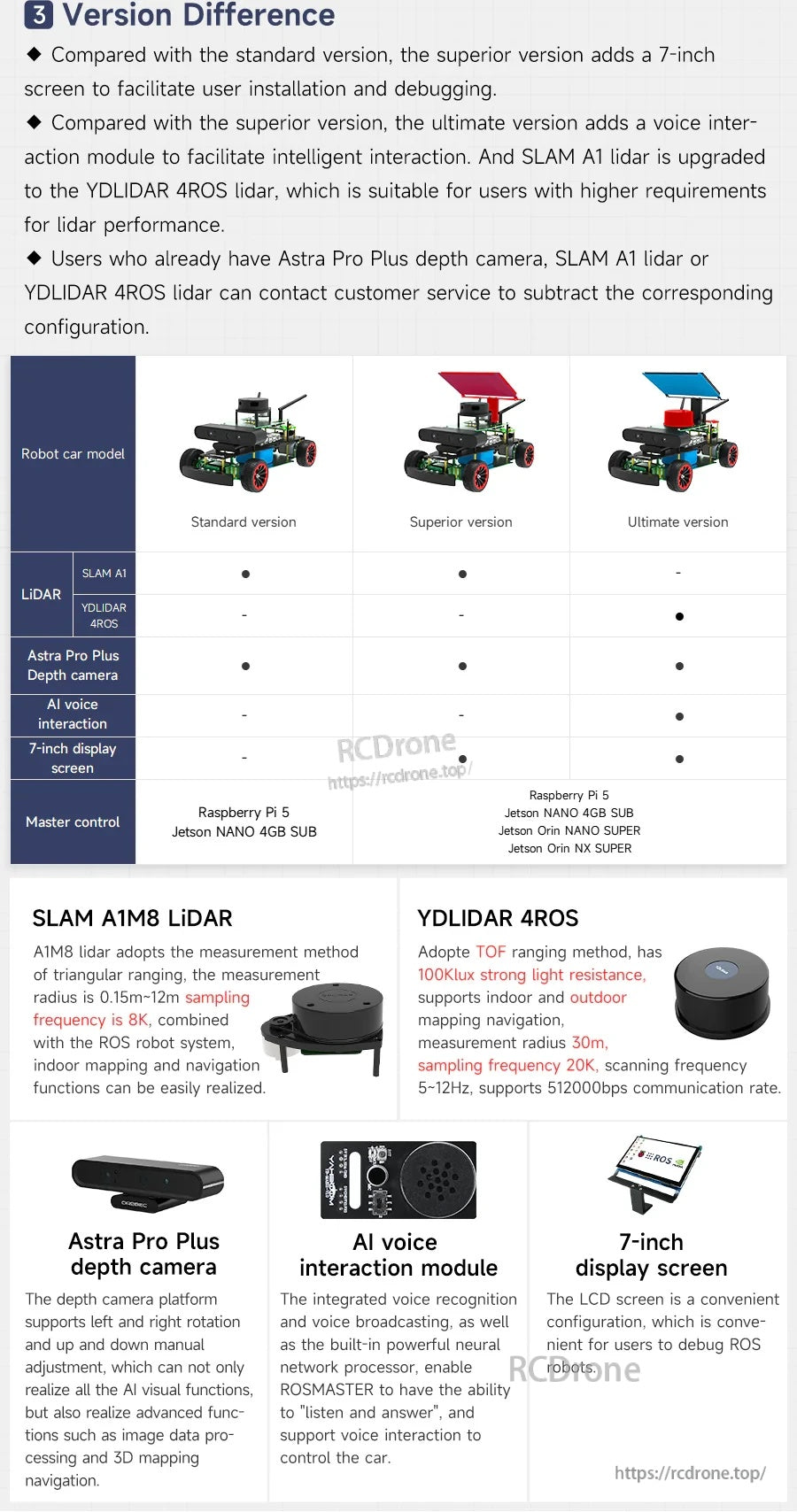
| Detalles del LiDAR SLAM A1M8 | Rango triangular; radio de medición 0.15 m a 12 m; frecuencia de muestreo 8K |
| Detalles de YDLIDAR 4ROS | Rango TOF; resistencia a luz fuerte de 100Klux; navegación de mapeo interior/exterior; radio de medición 30 m; frecuencia de muestreo 20K; frecuencia de escaneo de 5 a 12 Hz; soporta tasa de comunicación de 512000 bps |
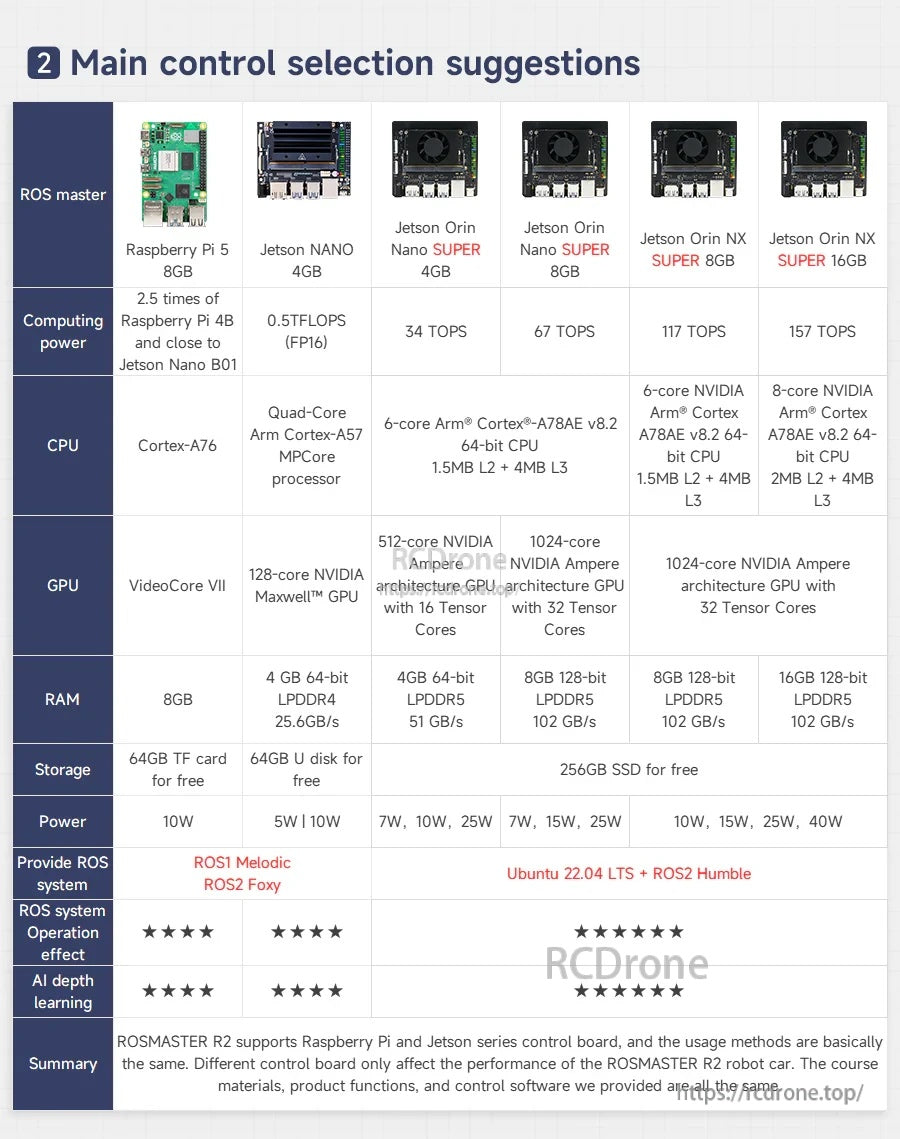
| Tableros de control principales compatibles | Jetson Nano B01 4GB; Jetson NANO 4GB SUB; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin NX SUPER 8GB/16GB; Raspberry Pi 5 (8GB referenciado) |
| Rendimiento de IA de referencia (controlador) | Jetson Orin NX SUPER 16GB: 157 TOPS; Jetson Orin NX SUPER 8GB: 117 TOPS; Jetson Orin Nano SUPER 8GB: 67 TOPS; Jetson Orin Nano SUPER 4GB: 34 TOPS; Jetson Nano B01 4GB: 0.5 TFLOPS; Raspberry Pi 5: cerca de Jetson Nano B01 |
| Imágenes del sistema proporcionadas (referenciadas) | Raspberry Pi / Jetson Nano: ROS1 Melodic, ROS2 Foxy; Serie Orin: Ubuntu 22.04 LTS + ROS2 Humble |
| Patente (chasis Ackermann) | Número de patente 2022208771981 |
Opciones de versión
- Versión estándar: SLAM A1 LiDAR; cámara de profundidad; control principal: Raspberry Pi 5 o Jetson NANO 4GB SUB.
- Versión superior: añade una pantalla de 7 pulgadas (para instalación/depuración); control principal: Raspberry Pi 5, Jetson NANO 4GB SUB, Jetson Orin NANO SUPER, Jetson Orin NX SUPER.
- Versión definitiva: añade módulo de interacción por voz AI; actualiza LiDAR de SLAM A1 a YDLIDAR 4ROS; incluye una pantalla de 7 pulgadas; control principal: Raspberry Pi 5, Jetson NANO 4GB SUB, Jetson Orin NANO SUPER, Jetson Orin NX SUPER.
Aplicaciones
- Aprendizaje y desarrollo de ROS/ROS2 (comunicación de robots, nodos y práctica de middleware)
- Proyectos de aprendizaje de mapeo y navegación SLAM, planificación de rutas y evitación de obstáculos
- Procesamiento de nube de puntos de cámara de profundidad y LiDAR y temas de mapeo 3D
- Proyectos de visión AI (temas de YOLO/MediaPipe/OpenCV incluidos en los tutoriales)
- Temas de aprendizaje de escenarios de piloto automático (detección de carreteras, mantenimiento de carril, estacionamiento autónomo, decisión de dirección)
Nota: Se proporcionan casos de referencia de entrenamiento de modelos de piloto automático para el modelo de coche R2L; el modelo de coche R2 no puede usar directamente esos casos, y se requiere desarrollo para construir modelos basados en las escenas de cámara y mapa.
Tutoriales
Enlace del tutorial (página de estudio oficial): http://www.yahboom.net/study/ROSMASTER-R2
Para orientación sobre configuración (incluida la selección de versión y combinaciones de sensores/controladores), contacte al servicio de atención al cliente en https://rcdrone.top/ o [email protected].
Detalles

ROSMASTER R2 combina la dirección Ackermann con hardware compatible con ROS2 para proyectos de mapeo, navegación y visión AI.

Diseñado para flujos de trabajo de desarrollo ROS, la plataforma admite mapeo/navegación SLAM más interacción de voz AI a bordo.
Elija el controlador principal que se adapte a su carga de trabajo: las opciones incluyen placas Jetson Orin SUPER y Raspberry Pi 5.
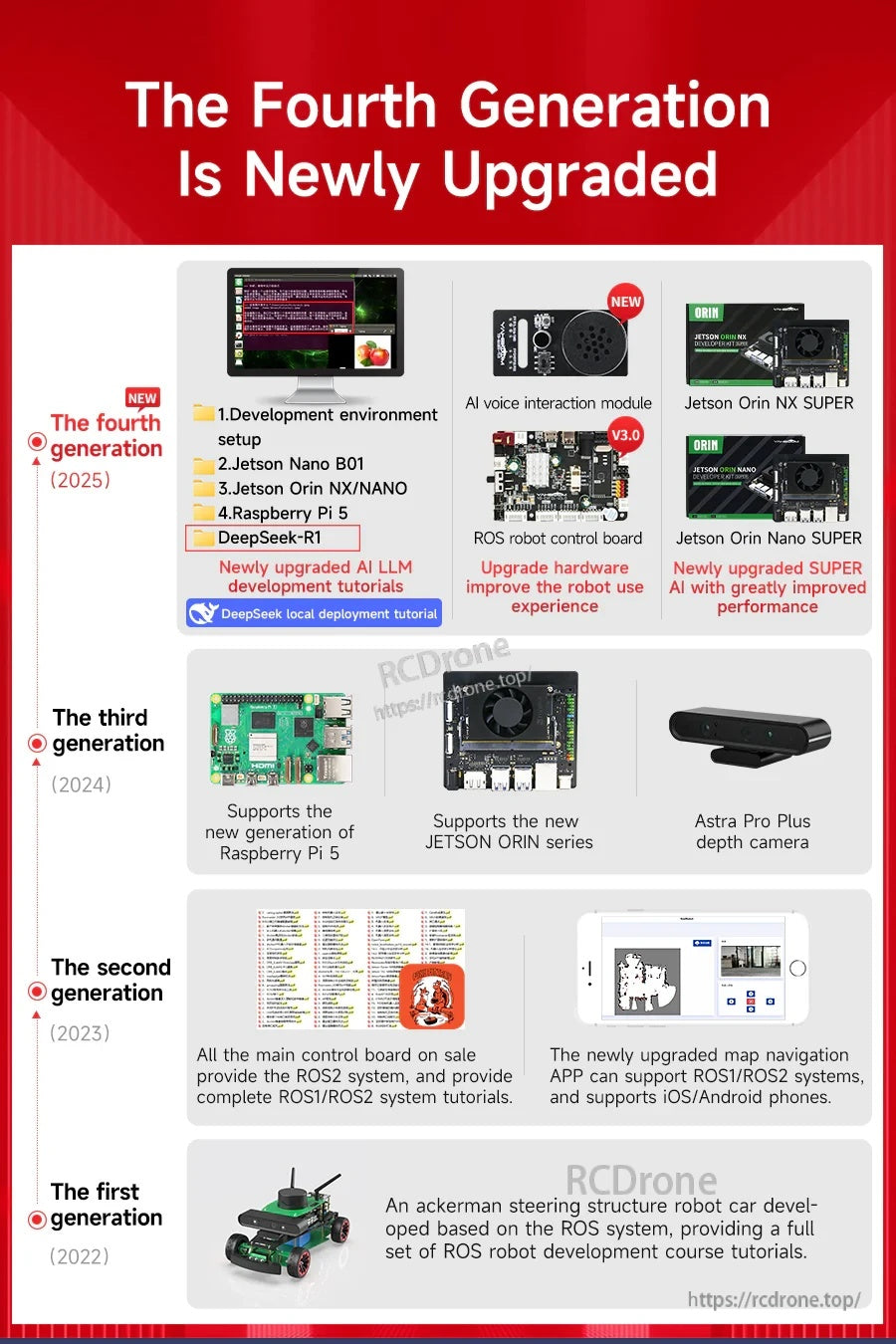
La generación actualizada agrega un soporte más amplio para controladores y contenido de aprendizaje expandido para usuarios de ROS1/ROS2.
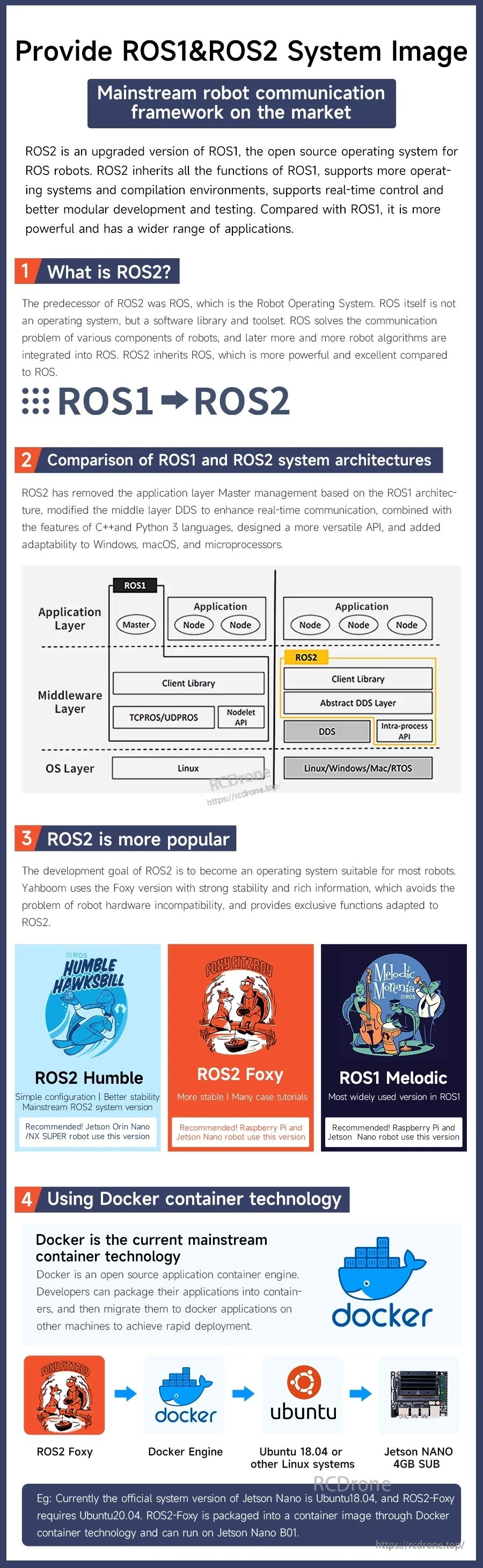
Las imágenes preconstruidas de ROS1/ROS2 y la implementación basada en Docker ayudan a simplificar la configuración para laboratorios de desarrollo y enseñanza.
Se recomienda la dirección Ackermann para conducción similar a un automóvil y experimentos de navegación estilo piloto automático.
El hardware principal incluye un chasis Ackermann, motores 520, opciones de LiDAR y una cámara de profundidad Astra Pro para tareas de percepción.
El rendimiento y el consumo de energía varían según el controlador, lo que facilita ajustar las necesidades de cómputo a su carga de trabajo ROS.
Diferentes versiones del kit le permiten agregar sensores y módulos de interacción según sus objetivos de mapeo e inteligencia artificial.
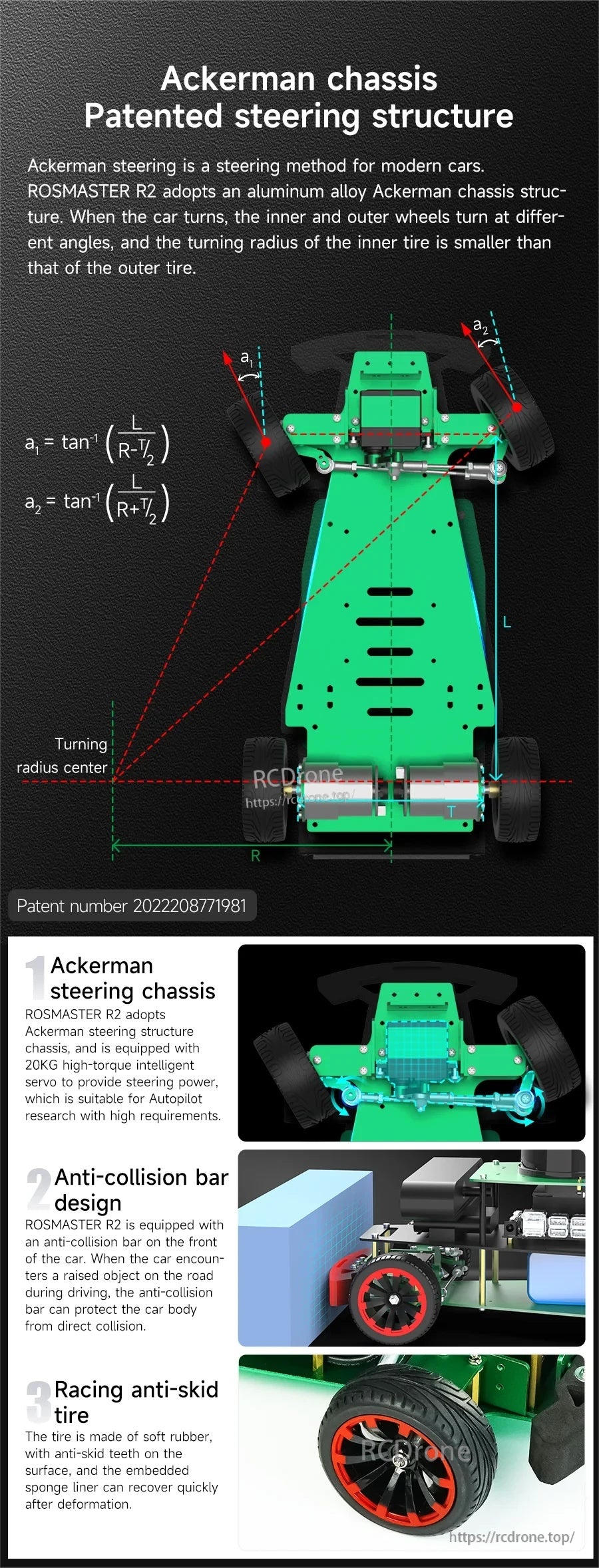
El chasis de aluminio Ackermann está diseñado para una dirección estable, con detalles de estructura protectora destacados para estudio y mantenimiento.
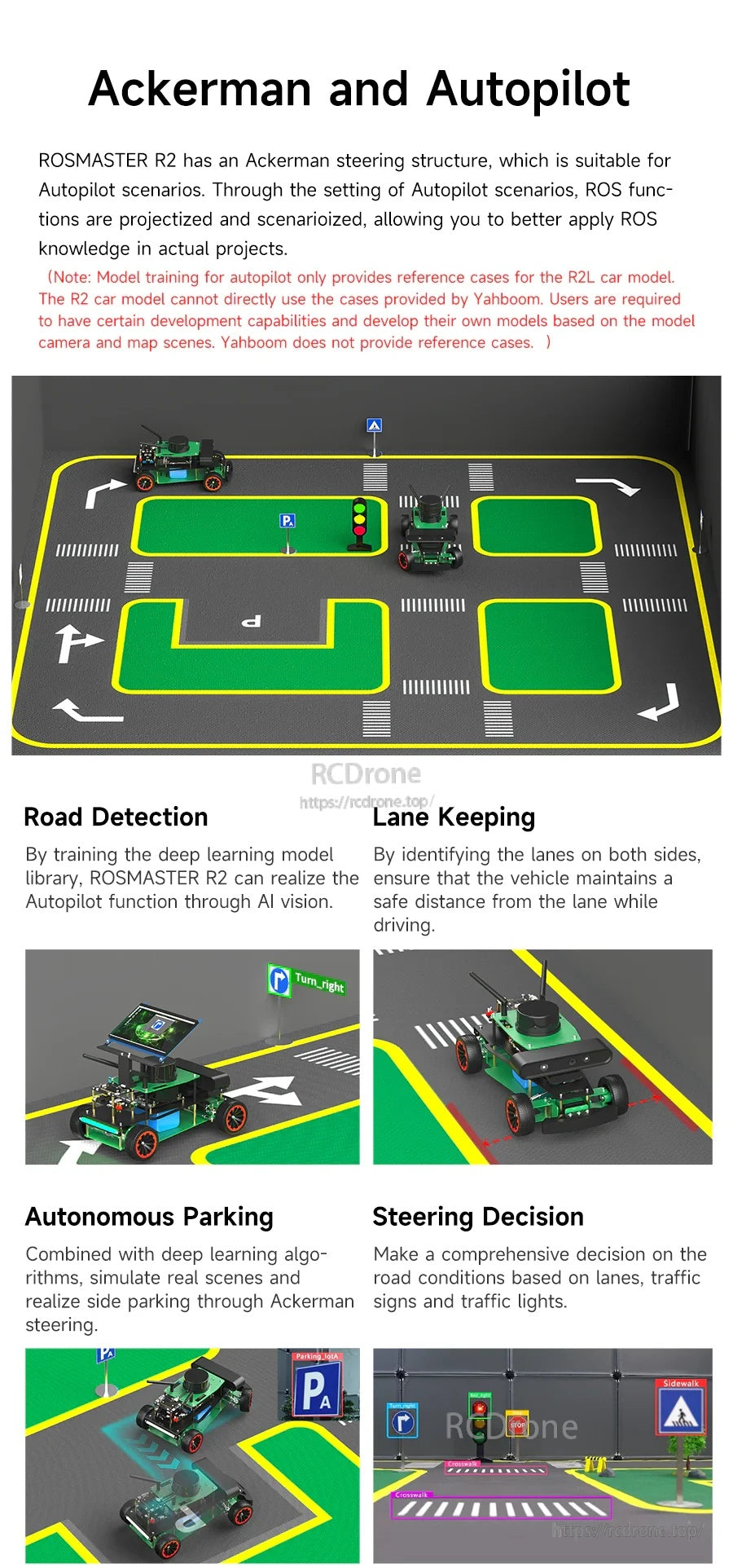
Los temas de aprendizaje de piloto automático incluyen mantenimiento de carril, detección de carreteras, decisiones de dirección y flujos de trabajo de estacionamiento.

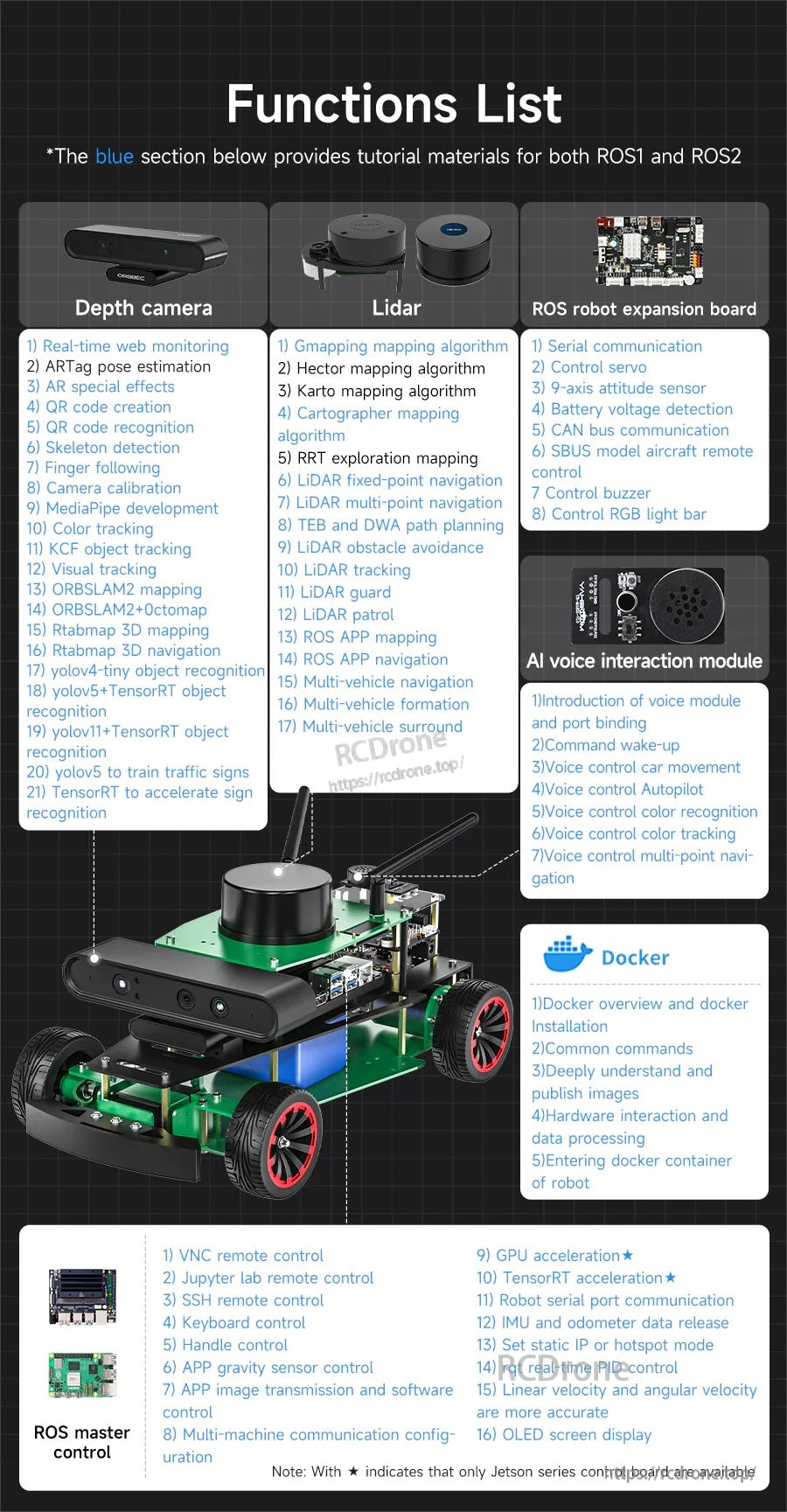
Se proporciona un amplio conjunto de temas ROS en métodos de detección, navegación, interacción por voz y control remoto.
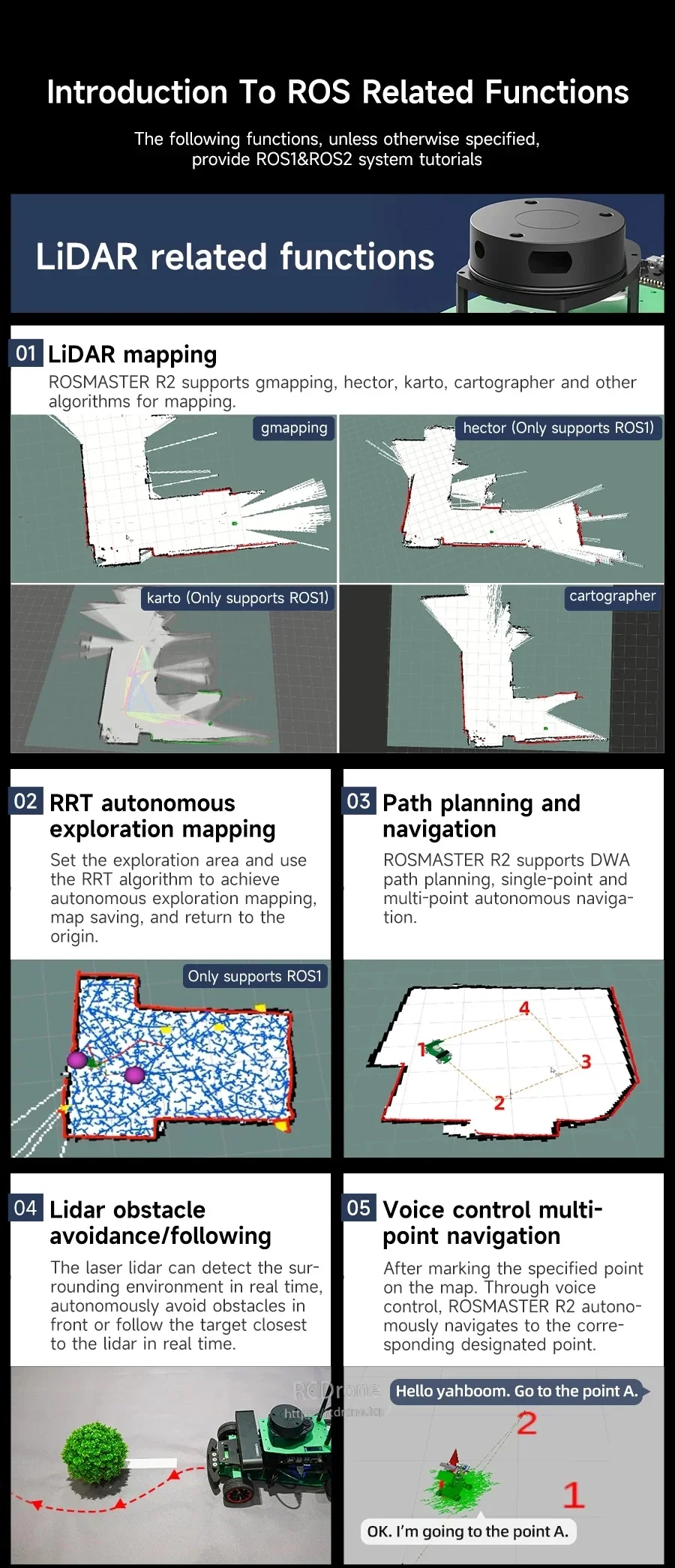
Las demostraciones centradas en LiDAR cubren mapeo, exploración, planificación de rutas, evitación de obstáculos y navegación por puntos guiada por voz.
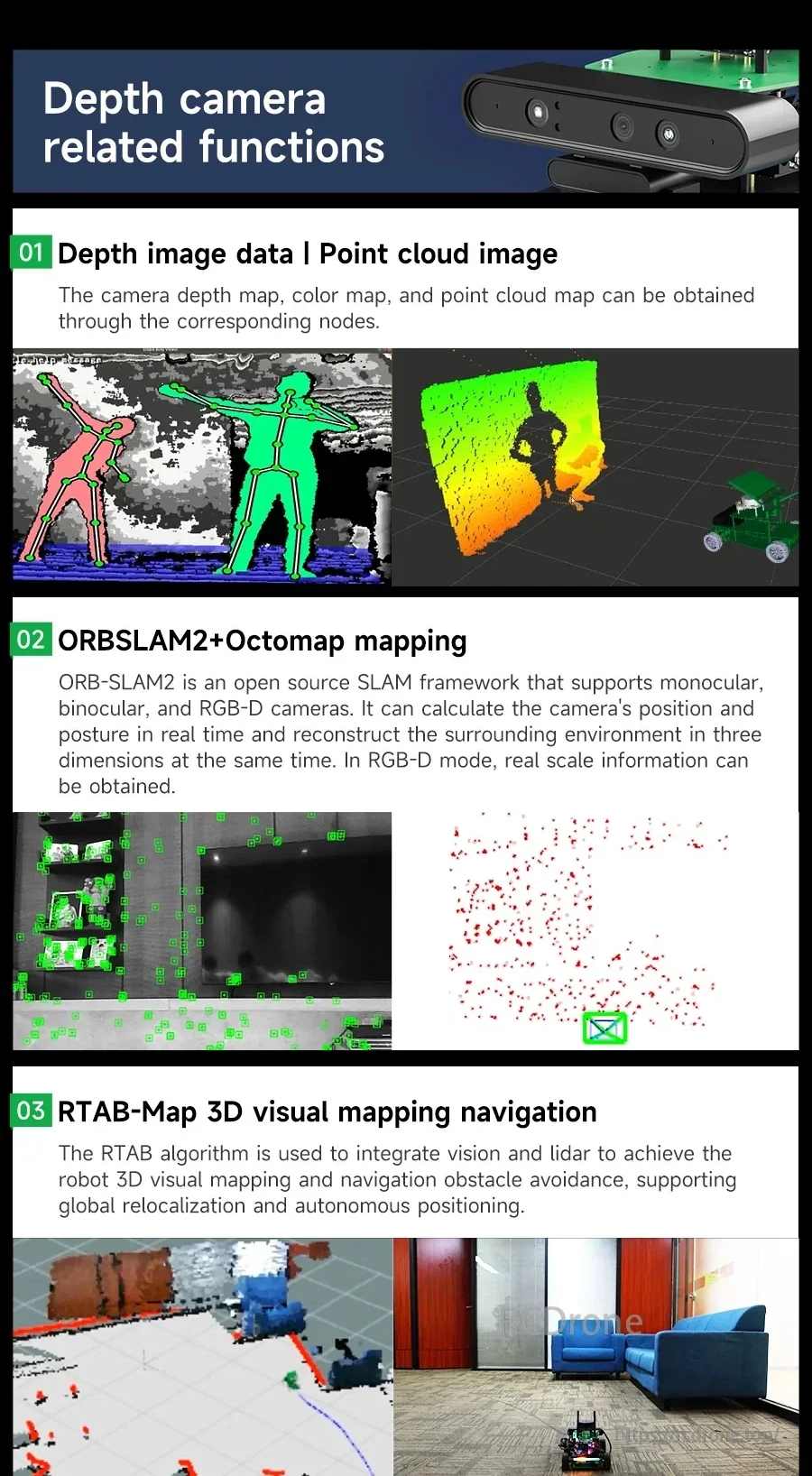
Los flujos de trabajo de cámaras de profundidad incluyen nubes de puntos más opciones de SLAM como ORB-SLAM2/OctoMap y navegación 3D con RTAB-Map.
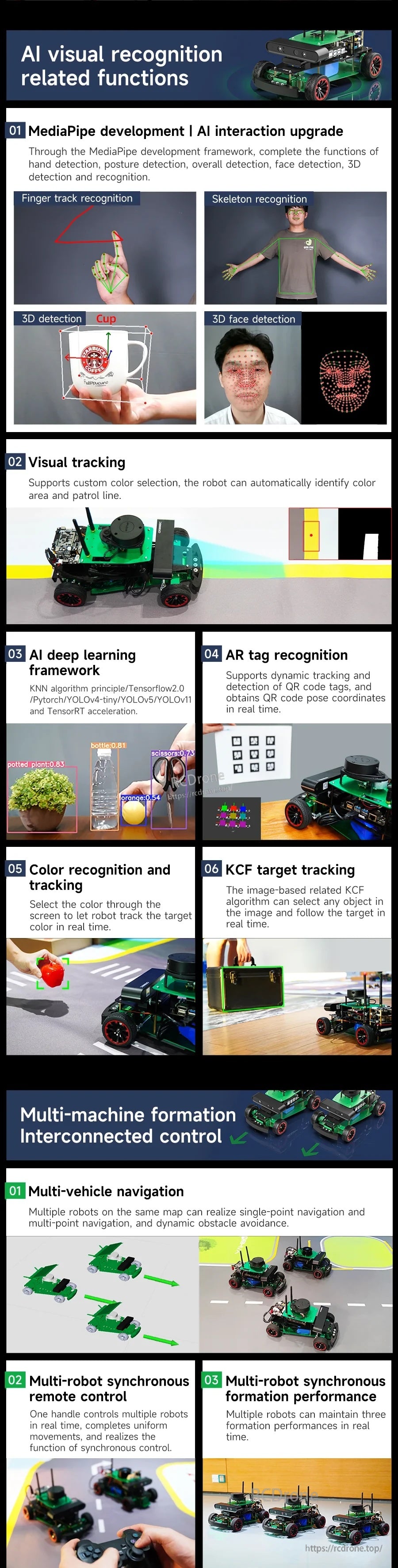
ROSMASTER R2 incluye opciones de reconocimiento visual con IA como interacción basada en MediaPipe, reconocimiento de etiquetas AR y de color, y seguimiento de objetivos, además de control de formación de múltiples robots.
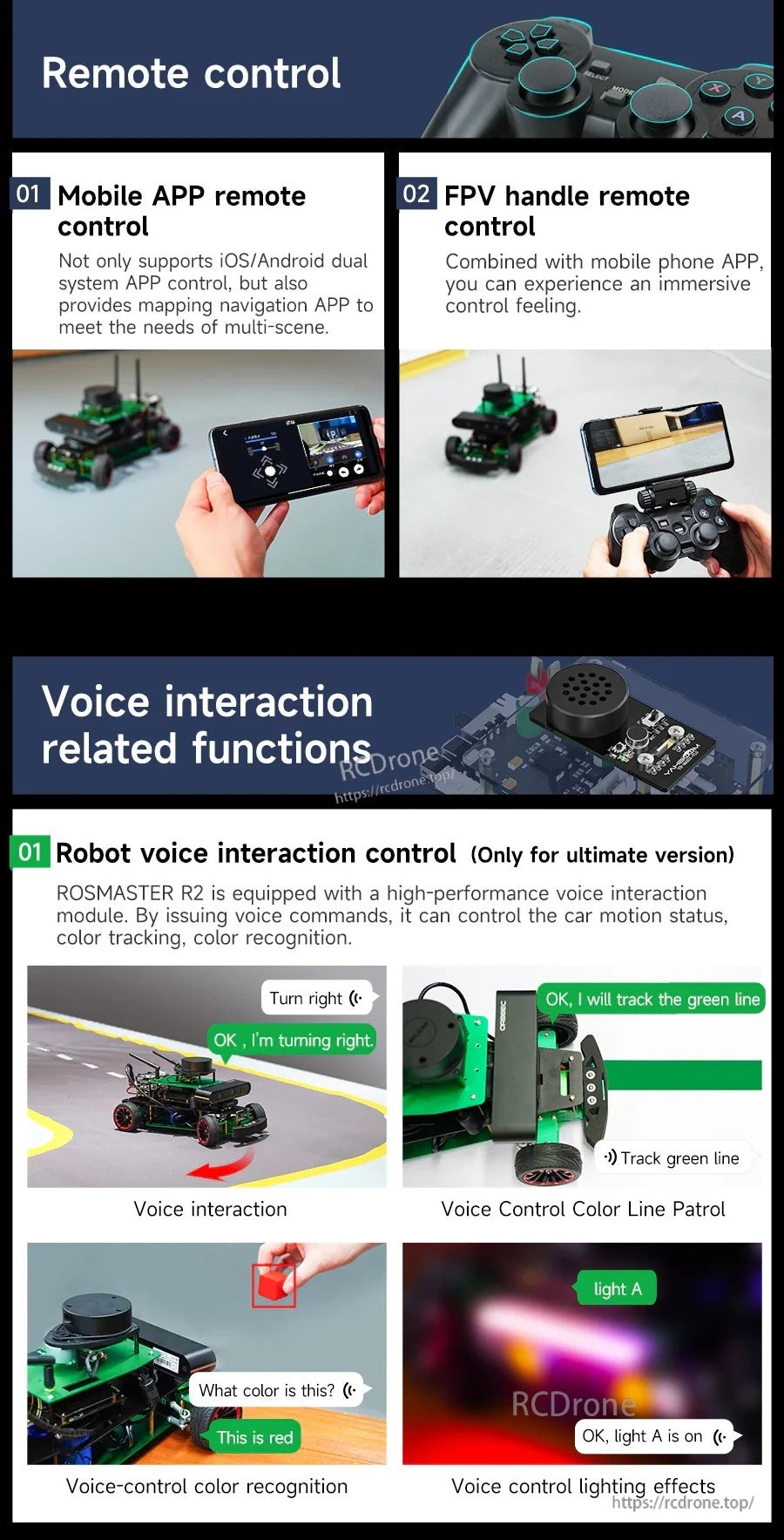
ROSMASTER R2 admite control remoto por aplicación móvil o gamepad, además de funciones opcionales de interacción por voz como reconocimiento y seguimiento de color.
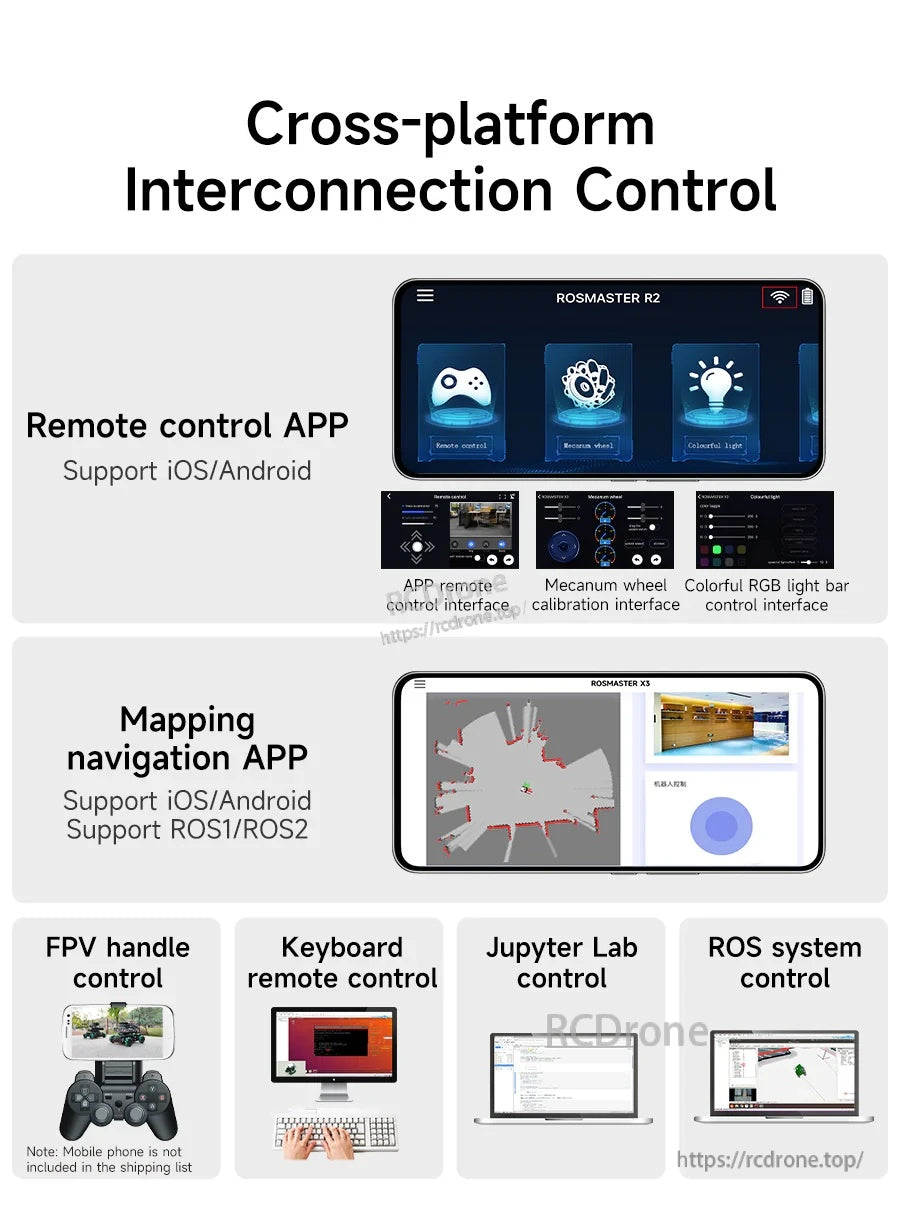
ROSMASTER R2 admite control remoto y aplicaciones de navegación de mapeo para iOS/Android, junto con opciones como teclado, Jupyter Lab y control del sistema ROS.
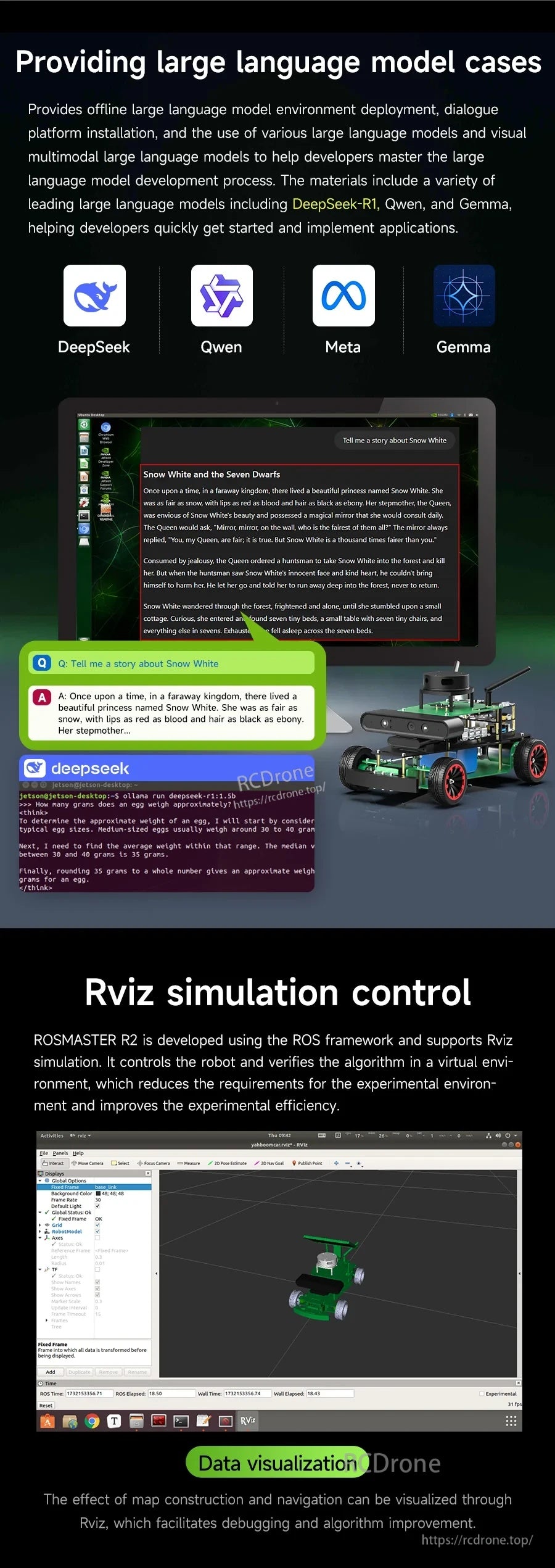
Los recursos de ROSMASTER R2 incluyen ejemplos de control de simulación RViz y referencias de casos de modelos de lenguaje grande para el aprendizaje de ROS2.
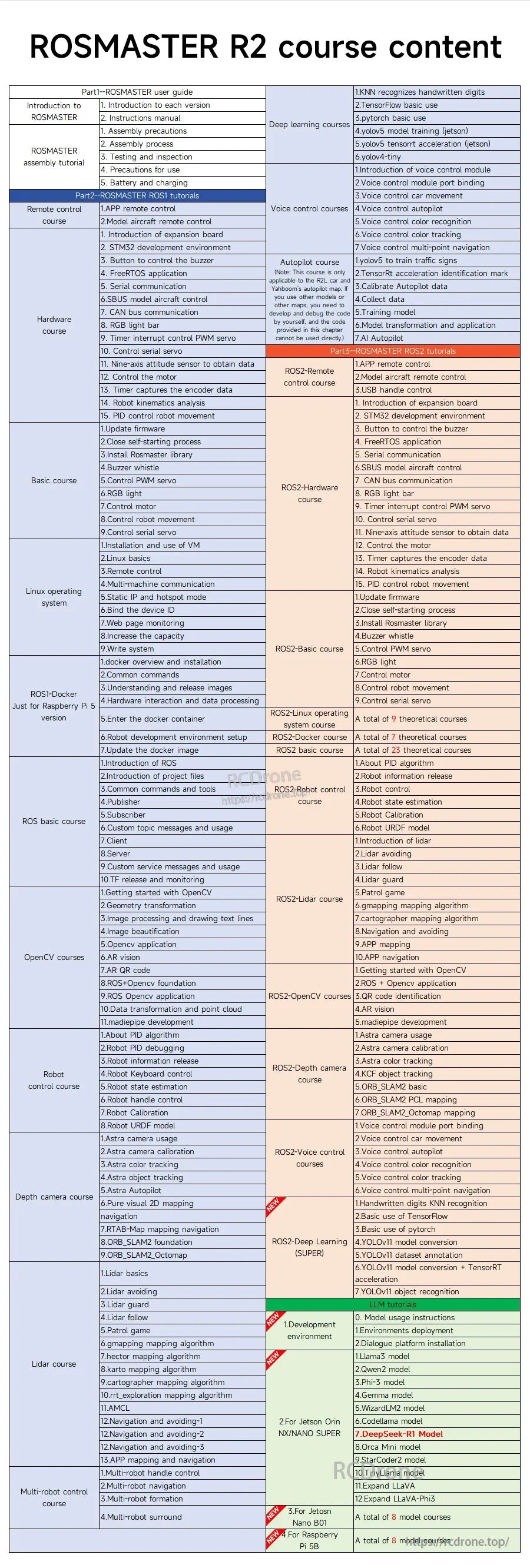
El contenido del curso ROSMASTER R2 está organizado en lecciones paso a paso de ROS2 y temas de módulos para construir y controlar un robot Ackermann.
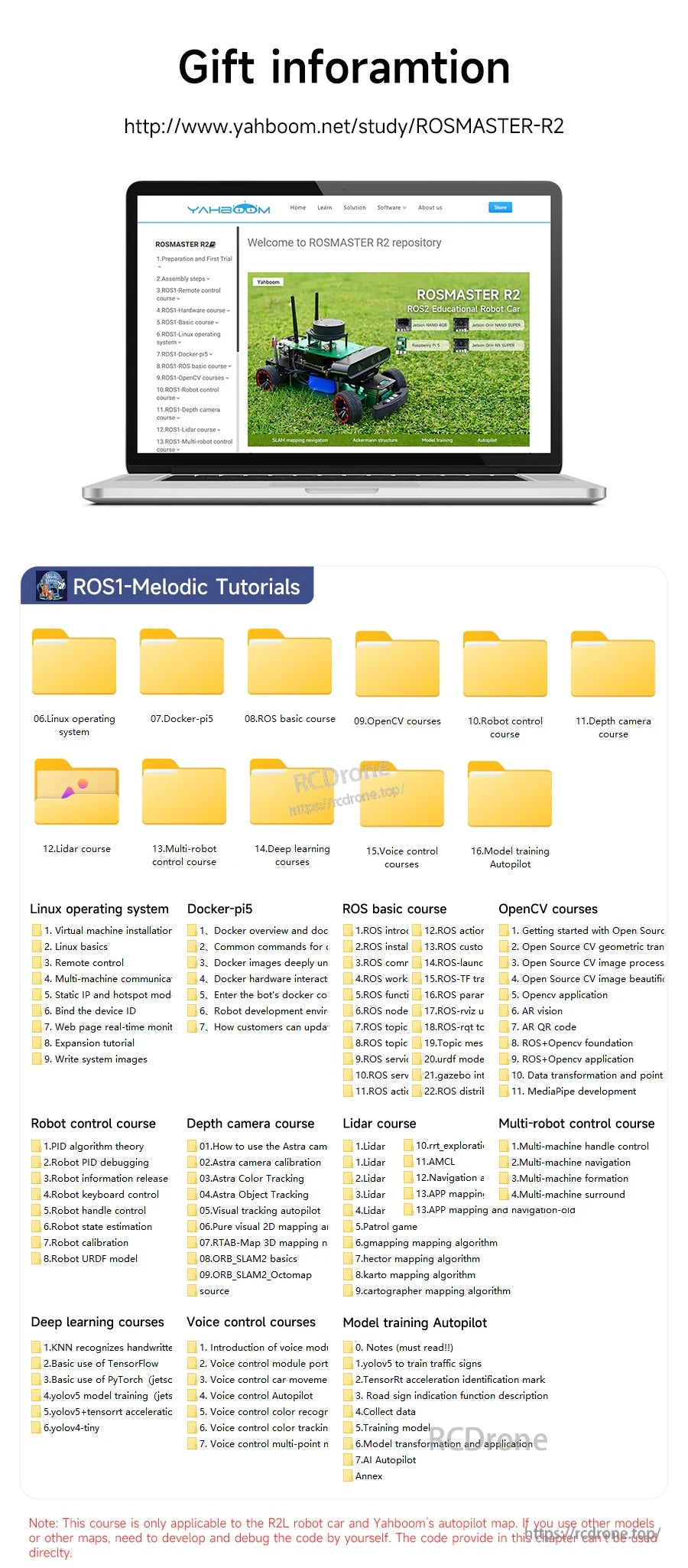
ROSMASTER R2 incluye una página de descarga con carpetas de tutoriales de ROS y esquemas del curso para ayudarte a comenzar con la configuración y programación.
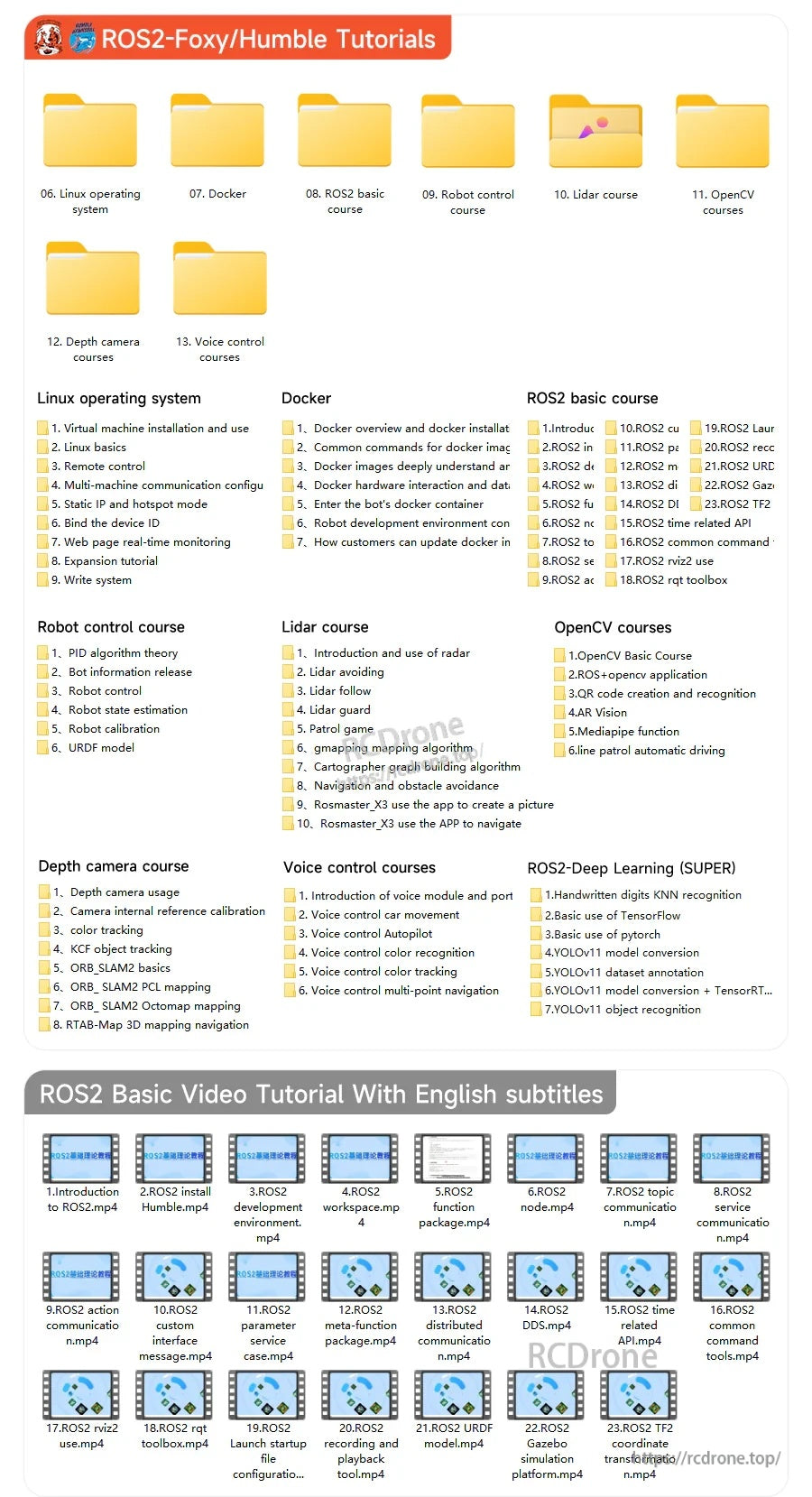
ROSMASTER R2 incluye recursos de tutoriales de ROS2 Foxy/Humble que cubren temas como Linux, Docker, lidar, OpenCV y lecciones básicas de ROS2 con subtítulos en inglés.
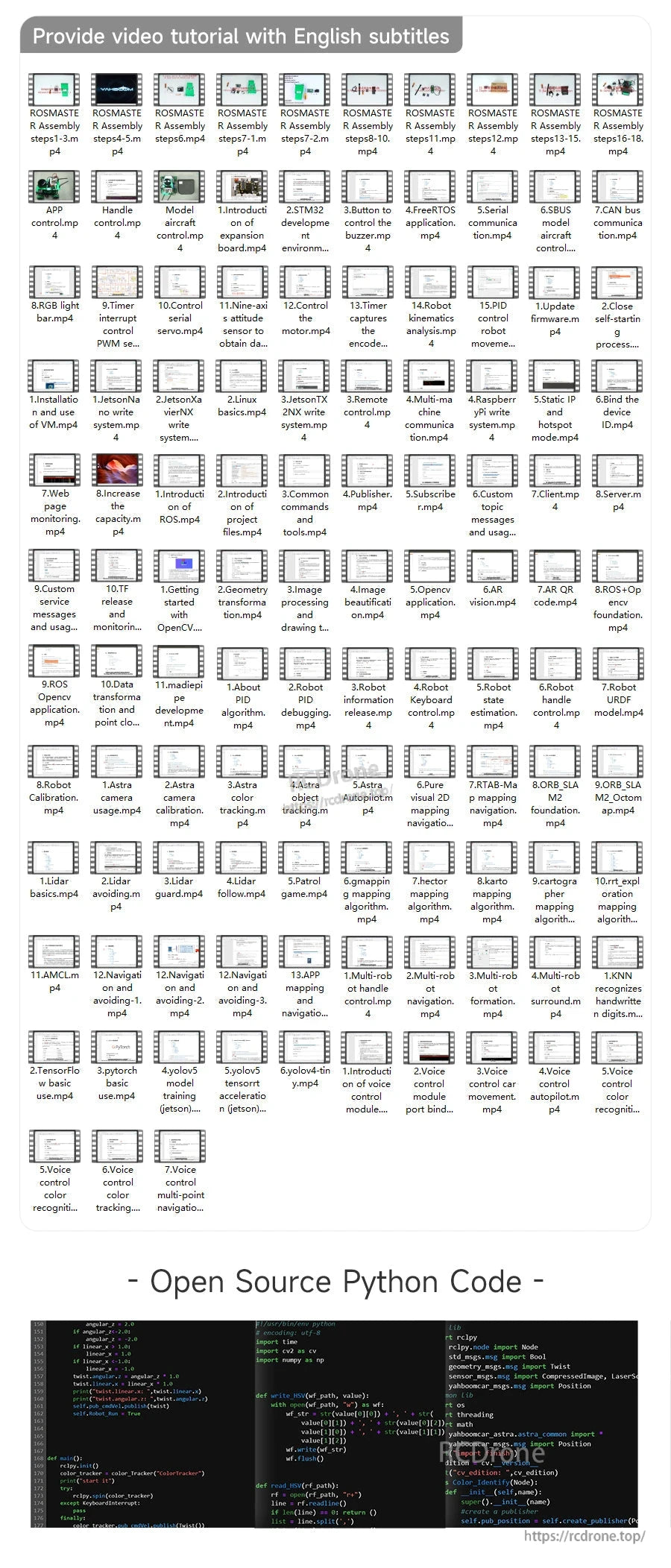
ROSMASTER R2 incluye recursos descargables con tutoriales en video subtitulados en inglés y código Python de código abierto para el desarrollo de ROS2.
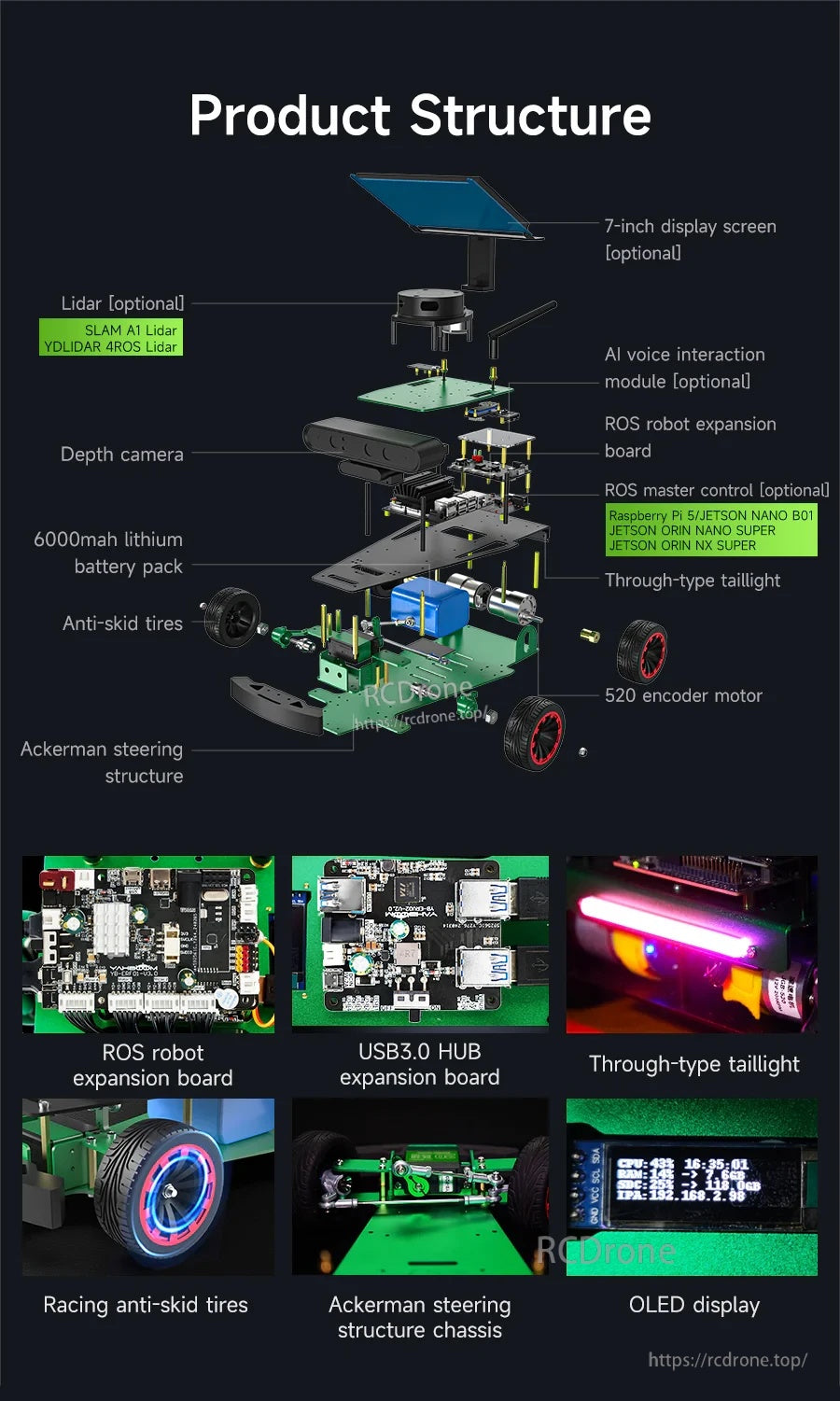
ROSMASTER R2 utiliza un chasis de dirección Ackermann con placas de expansión, motores con codificador, paquete de baterías y módulos opcionales como lidar, cámara de profundidad y una pantalla de 7 pulgadas.

ROSMASTER R2 admite ya sea SLAM A1 o YDLIDAR 4ROS lidar láser, además de una cámara de profundidad Astra Pro Plus mejorada a 2MP para percepción.
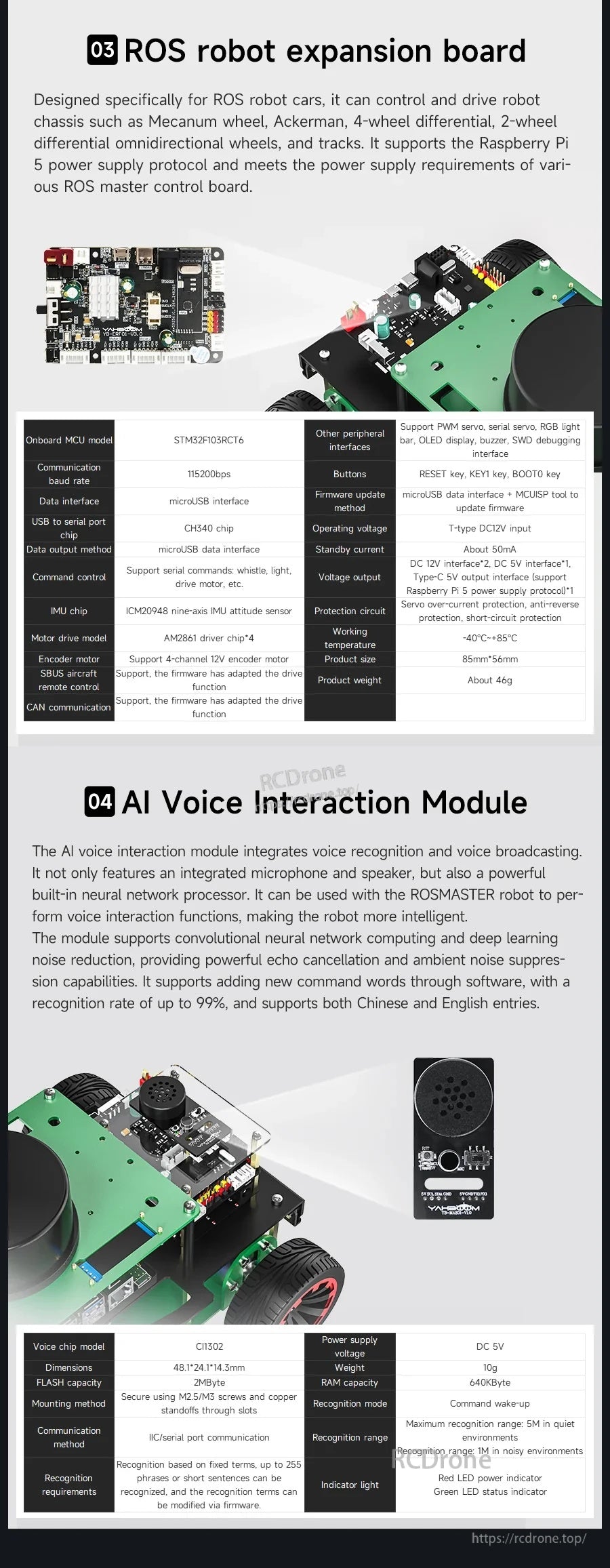
La placa de expansión del robot ROS y el módulo de interacción de voz AI se integran con el chasis ROSMASTER R2 para admitir conexiones de sensores y funciones de control por voz.
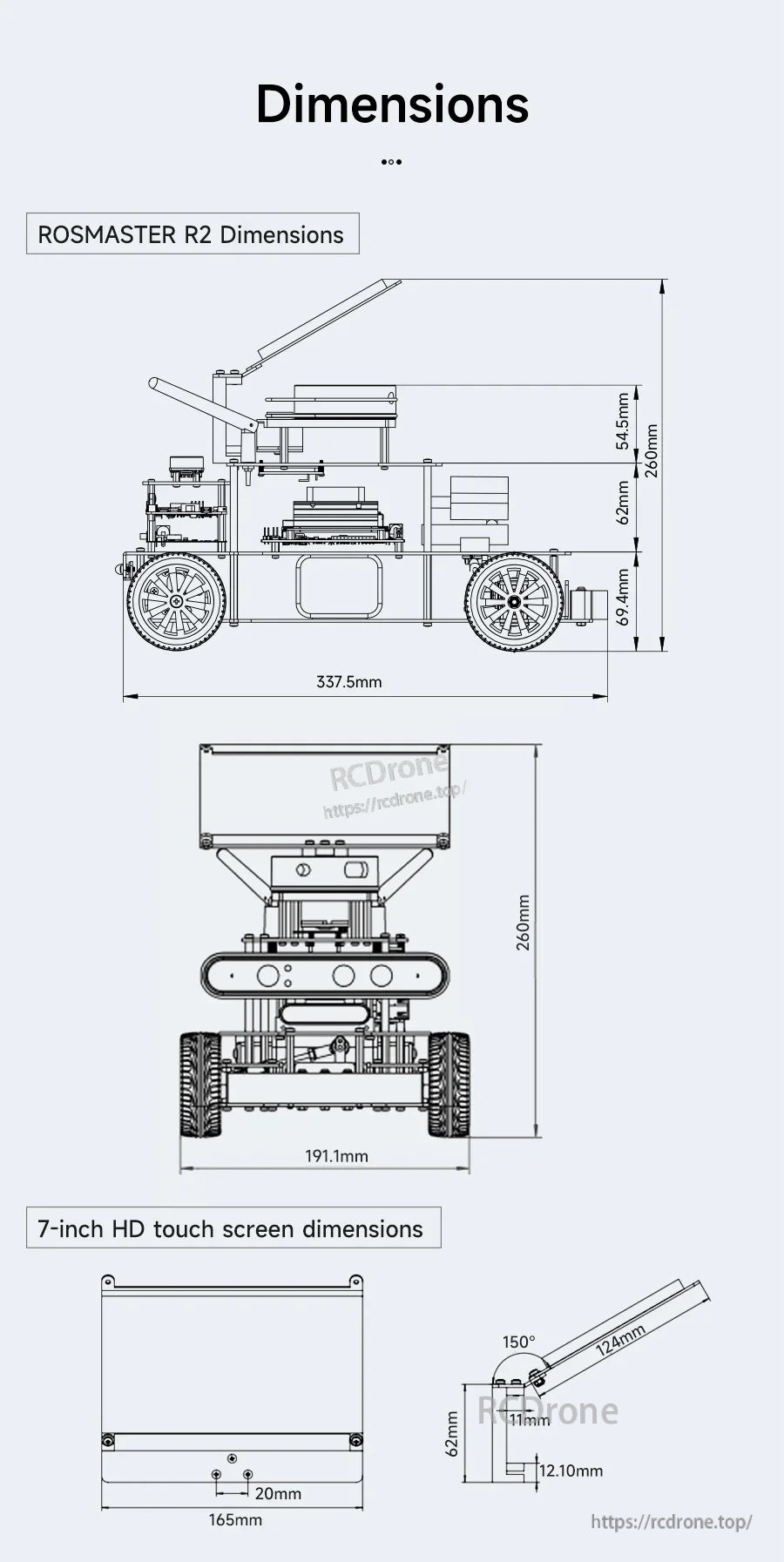
Las vistas de dimensiones de ROSMASTER R2 proporcionan referencias clave de longitud y ancho total, junto con el tamaño de la pantalla táctil HD de 7 pulgadas para la planificación del recinto.
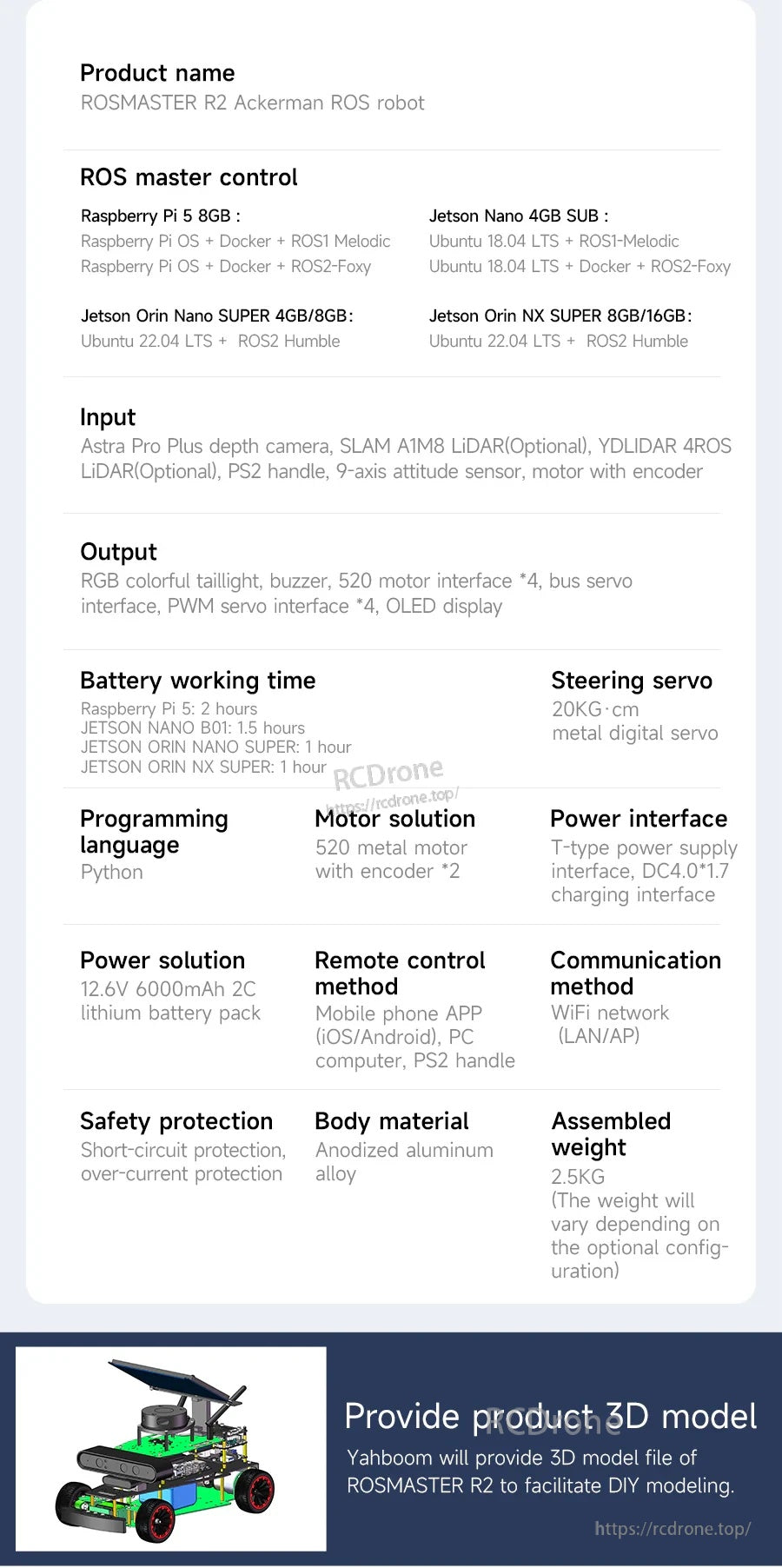
El robot ROSMASTER R2 Ackermann ROS2 admite Raspberry Pi 5/4 o Jetson Orin Nano/AGX, con entradas de cámara/SLAM/LiDAR y opciones de control por aplicación o remoto.
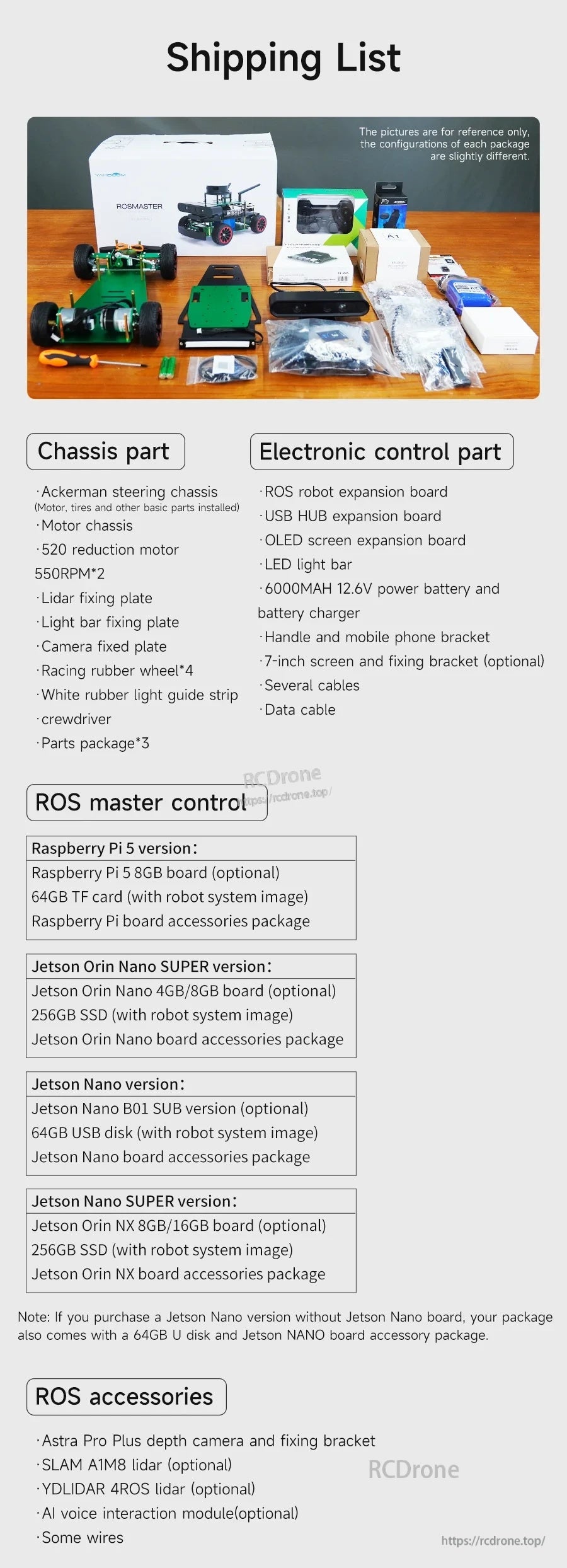
El kit ROSMASTER R2 incluye el chasis de dirección Ackermann, placas de control electrónico, módulo de cámara, cableado y diversos accesorios de montaje para el ensamblaje.
Related Collections
































