



Drone programable S2-F290 - Pixwawk Open Source ROS SLAM AI Nivel industrial de desarrollo secundario para Drone Challenge
Drone programable S2-F290 - Pixwawk Open Source ROS SLAM AI Nivel industrial de desarrollo secundario para Drone Challenge
RCDrone
No se pudo cargar la disponibilidad de retiro
Descripción general
El Drone programable S2-F290 Es un alto rendimiento dron de grado industrial Diseñado para el desarrollo secundario y los desafíos de los drones. Con un Capacidad de carga útil de 2400 g, a Batería 6S 6000mAh, y un Distancia máxima de control de 10KM, ofrece precisión con Precisión de posicionamiento GPS de ≈1–2 m y Resistencia al viento de nivel 3-4Desarrollado por el Controlador de vuelo Pixhawk 2.4.8 con Tecnología ROS SLAM de código abierto, el dron admite funciones avanzadas como Mapeo LiDAR 3D, reconocimiento de objetos basado en YOLO y vuelo en formación. Es Marco de fibra de carbono de 3 mm garantiza una durabilidad y estabilidad excepcionales, probadas en condiciones extremas. La plataforma es altamente personalizable y ofrece funciones como compatibilidad con estaciones terrestres QGC en chino e inglés, capacidad de expansión modular y tutoriales completos, lo que la hace ideal para aplicaciones de investigación, competencia y desarrollo.
Especificación
Aeronave
| Parámetro | Especificación |
|---|---|
| Nombre | Drone programable S2-F290 |
| Peso de la carga útil | 2400 gramos |
| Modelo | S2-F290 |
| Precisión de posicionamiento GPS | ≈1–2m |
| Distancia entre ejes | 290 mm |
| Peso máximo de despegue | 3190 gramos |
| Batería | Batería estándar 6S de 6000 mAh |
| Distancia de control | 10 KM (recomendado a 1000 m) |
| Resistencia al viento | Nivel 3-4 |
| Entorno operativo | Interior/exterior |
| Resultados de la prueba de resistencia | Detalles |
|---|---|
| Hélices | 7 pulgadas |
| Capacidad de la batería | 6S 6000mAh (5300mAh usados) |
| Ambiente | Sin viento |
| Tiempo de vuelo | 11 minutos 30 segundos |
Controlador de vuelo
| Componente | Especificación |
|---|---|
| Procesador FMU | STM32H743 Cortex-M7, 480 MHz, memoria Flash de 2 MB, memoria SRAM de 1 MB |
| Procesador IO | STM32F103 Cortex-M3, 72 MHz, 64 KB de memoria RAM |
| Sensores | Acelerómetro/Giroscopio: ICM-42688-P |
| Acelerómetro/Giroscopio: BMI055 | |
| Magnetómetro: IST8310 | |
| Barómetro: MS5611 | |
| Voltaje nominal | Voltaje máximo de entrada: 6 V |
| Entrada de alimentación USB: 4,75-5,25 V | |
| Entrada del servo: 0-36 V | |
| Corriente nominal | Telemetría 1 Corriente máxima de salida: 1 A |
| Corriente combinada para otros puertos: 1 A | |
| Datos mecánicos | Dimensiones: 53,3 × 39 × 16,2 mm |
| Peso: 39.2 gramos | |
| Puertos | - 14 salidas PWM (8 desde IO, 6 desde FMU) |
| - 2 puertos serie de propósito general | |
| - 2 puertos GPS | |
| - 1 puerto I2C | |
| - 2 puertos CAN | |
| - Entrada RC para Spektrum/DSM, S.BUS, CPPM, etc. | |
| - Puerto de entrada de energía | |
| Otras características | Temperatura de funcionamiento: -40–85 °C |
Computadora de a bordo
| Componente | Especificación |
|---|---|
| Poder de cómputo | 40 TOPS |
| GPU | 32 núcleos Tensor con GPU NVIDIA Ampere de 1024 núcleos |
| UPC | Procesador Arm Cortex-A78AE v8.2 de 6 núcleos y 64 bits, 1,5 GHz |
| RAM | LPDDR5 de 8 GB y 128 bits a 68 GB/s |
| Almacenamiento | Tarjeta SD o NVMe externa |
| Frecuencia máxima de CPU | 1,5 GHz |
Control remoto
| Componente | Especificación |
|---|---|
| Voltaje de funcionamiento | 4,2 V |
| Corriente de funcionamiento | 100 mA |
| Banda de frecuencia | 2,4–2,483 GHz |
| Peso | 525 gramos |
| Dimensiones | 130 × 150 × 20 mm |
| Duración de la batería | 20 horas |
| Puerto de carga | MICRO-USB |
| Rango de control | 7 KILÓMETROS |
GPS
| Componente | Especificación |
|---|---|
| Receptor de satélite | UBLOX-M9, 92 canales |
| Brújula electrónica | QMC5883L |
| Sistemas satelitales | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Canales satelitales | 32 |
| Frecuencia de actualización | 25 Hz |
| Precisión de posicionamiento | 1,5 m CEP (entorno ideal) |
| Tiempo de inicio | Arranque en frío: 24 s, arranque en caliente: 1 s |
| Dimensiones | 25 × 25 × 8 mm |
| Peso | 12 g |
Batería
| Componente | Especificación |
|---|---|
| Tipo de conector | XT60 |
| Corriente de carga recomendada | 3–5A |
| Capacidad de la batería | 6000 mAh |
| Voltaje nominal | 22.2 V |
| Tasa de descarga | 75 °C |
| Dimensiones | 50 × 44 × 158 mm |
| Peso | 816 gramos |
LiDAR
| Componente | Especificación |
|---|---|
| Longitud de onda del láser | 905 nm |
| Rango | 40 m con 10 % de reflectividad, 70 m con 80 % de reflectividad |
| Área mínima de detección | 0,1 millones |
| Campo de visión | Horizontal: 360°, Vertical: -7° a 52° |
| Salida de nube de puntos | 200.000 puntos/segundo |
| Tasa de puntos | 10 Hz |
| Nivel de protección | IP67 |
| Fuerza | 6,5 W (entorno de 25 °C) |
| Rango de voltaje | 9–27 V CC |
| Dimensiones | 65 × 65 × 60 mm |
| Peso | 265 gramos |
Cámara de profundidad
| Componente | Especificación |
|---|---|
| Tecnología de profundidad | Doble infrarrojo |
| Ángulo de visión de profundidad | 87° × 58° (Horizontal × Vertical) |
| Resolución de profundidad | 1280 × 720 |
| Precisión de profundidad | <2% en 2 m |
| Profundidad de cuadros por segundo | 90 fps |
| Rango de profundidad | 0,3–3 m |
| Dimensiones | 90 × 25 × 25 mm |
| Entorno operativo | Interior/exterior |
Cámara de lente única
| Componente | Especificación |
|---|---|
| Resolución máxima | 2MP (1920 × 1080) |
| Velocidad máxima de cuadros | 30 fps |
| Campo de visión | ~90° |
| Longitud del cable | ~1.5 m |
| Dimensiones | 35 × 35 × 30 mm |
Tabla de funciones
| unción | Configuración básica | D435 opcional | Módulo D435 + 4G opcional |
|---|---|---|---|
| Mantener la altitud, flotar, volver a casa | ✔ | ✔ | ✔ |
| Aterrizaje, estabilización, vuelo de punto de referencia | ✔ | ✔ | ✔ |
| Vuelo por control remoto | ✔ | ✔ | ✔ |
| Comunicación entre el controlador de vuelo y la computadora de a bordo | ✔ | ✔ | ✔ |
| Reconocimiento y aterrizaje de códigos QR | ✔ | ✔ | ✔ |
| Reconocimiento y caída de objetos | ✔ | ✔ | ✔ |
| Mapeo simultáneo y evitación de obstáculos | ✔ | ✔ | ✔ |
| Mapeo y posicionamiento LiDAR 3D | ✔ | ✔ | ✔ |
| Reconocimiento de objetos basado en YOLO | ✘ | ✔ | ✔ |
| Reconocimiento y seguimiento de objetos | ✘ | ✔ | ✔ |
| Control remoto 4G | ✘ | ✘ | ✔ |
El paquete incluye
Configuración básica
- Marco:Cuadro de fibra de carbono F290
- Motores: 4× motor T F100 Kv1100
- ESC: 4× FlyFun T-Rex 5 45A
- Hélices: 4 hélices de tres palas de 7 pulgadas
- Controlador de vuelo:Pixhawk6mini
- Batería:Batería estándar 6S de 6000 mAh
- Cargador: Cargador de batería 6S
- Computadora de a bordo: Módulo Jetson Orin Nano 8G + WIFI
- Unidad de estado sólido:256G
- LiDAR:Livox MID360
- Cámara:Cámara USB gran angular de 150°
- Control remoto:Cloud T10 (incluye receptor de datos)
Configuración opcional: D435
Incluye todos los componentes del Configuración básica, más:
- Cámara de doble lente:D435
Configuración opcional: módulo D435 + 4G
Incluye todos los componentes del Básico Configuración, más:
- Cámara de doble lente:D435
- Módulo 4G
Detalles
Drone programable S2-F290
- ✔ Soporte técnico, servicio posventa sin complicaciones
- ✔ Proporciona ejemplos de competencia, personalizables
- ✔ Estación terrestre móvil chino/inglés
- ✔ Alta estabilidad, alto rendimiento
- ✔ Interior/exterior
El S2-F290 es un dron de última generación diseñado específicamente para carreras de drones, especializado en exploración e innovación.Diseñado para integrar tecnología avanzada y creatividad ilimitada, es capaz de adaptarse a diversos entornos complejos, haciendo que la exploración aérea sea más accesible y efectiva.
Este dron presenta un diseño compacto con una potencia inmensa. Ofrece una gran cantidad de ejemplos de competencia, lo que permite a los usuarios dominar y optimizar rápidamente su rendimiento. Equipado con una estación terrestre móvil dedicada en chino e inglés, mejora enormemente la comodidad de operación del dron. Además, proporciona explicaciones de código fuente competitivas y capacidad de personalización para garantizar que los usuarios puedan lograr las funcionalidades deseadas en el menor tiempo posible y sobresalir en escenarios competitivos.

Satisfacer las necesidades de desarrollo / competencia / investigación
| Categoría | Detalles |
|---|---|
| Conocimientos básicos de ROS | - Control remoto |
| - Comunicación entre el controlador de vuelo y la computadora de a bordo | |
| Funciones básicas | - Planificación de rutas |
| - Reconocimiento y posicionamiento de códigos QR | |
| - Patrulla Autónoma Fuera de Bordo | |
| Funciones avanzadas | - Reconocimiento de código QR para aterrizaje |
| - Reconocimiento y colocación de objetos | |
| - Mapeo simultáneo y evitación de obstáculos | |
| - Mapeo y posicionamiento LiDAR 3D | |
| - Reconocimiento de objetos basado en YOLO | |
| - Transmisión de vídeo basada en la Web | |
| - Vuelo en formación al aire libre | |
| - Formación de colaboración tierra-aire | |
| Funciones opcionales de la cámara D435 | - Posicionamiento visual VINS |
| - Reconocimiento y seguimiento de objetos basado en YOLO | |
| Funciones de comunicación 4G opcionales | - Control remoto 4G |
Prevención autónoma de obstáculos, garantía integral de seguridad
El dron utiliza un sistema de detección de obstáculos 3D LiDAR para evitar obstáculos de forma autónoma y combina la planificación de la ruta global con la detección dinámica de obstáculos a nivel local para detectar obstáculos con precisión desde todas las direcciones. Admite la detención automática y el vuelo continuo, lo que permite evitar objetos de forma flexible a lo largo de la ruta de vuelo y garantiza una experiencia de vuelo más segura.

Reconocimiento y aterrizaje de códigos QR
El dron activa la cámara y el módulo de reconocimiento de códigos QR para adquirir la información de posición en tiempo real del código QR. Durante el descenso, el dron ajusta dinámicamente su posición, asegurando una alineación precisa con el campo de visión de la cámara antes de proceder a aterrizar.
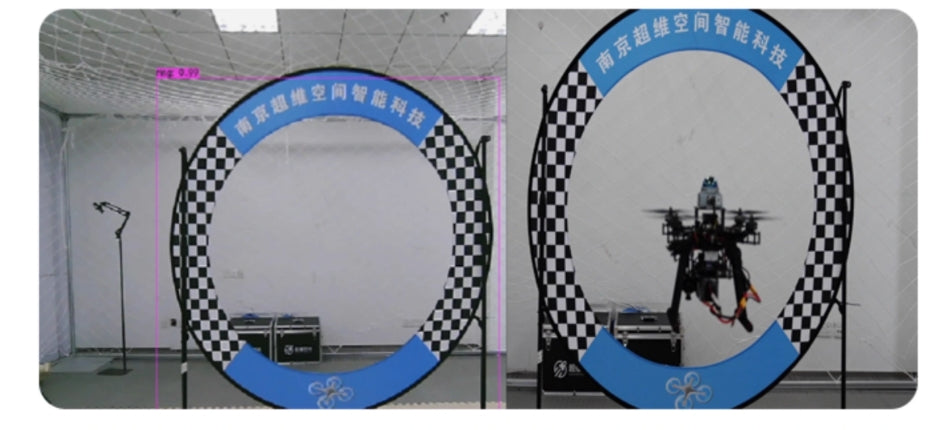
Reconocimiento de objetos YOLO
El dron utiliza YOLOv8 para el reconocimiento de objetos, adquiriendo la información de posición del marco circular en tiempo real. Ajusta su posición de forma autónoma y navega por el marco circular.
Vuelo en formación al aire libre
El dron utiliza tecnología de formación de enjambre, lo que permite el control coordinado de múltiples drones para lograr un vuelo en formación.Al aprovechar algoritmos avanzados de comunicación y control colaborativo, facilita la comunicación en tiempo real y el intercambio de información entre drones, sincronizando sus movimientos y posiciones para formar una formación compacta.

Formación de colaboración tierra-aire
Esta plataforma permite la formación colaborativa entre drones terrestres y aéreos. Al aprovechar una red de área local con estructuras de topología para la interconectividad de dispositivos, utiliza comunicación UDP y protocolos personalizados para garantizar una comunicación estable y de alta velocidad. Con el control PID, logra un seguimiento sincronizado entre el dron principal y varios drones esclavos, lo que garantiza la estabilidad de la formación y la eficiencia operativa.

Ejemplo de competencia
Proporciona escenarios de competición exclusivos con orientación paso a paso, lo que permite a los participantes adaptarse fácilmente a varios tipos de competiciones.



Características del dron programable S2-F290
Alta relación costo-beneficio
- Diseñado para principiantes para reducir la curva de aprendizaje y facilitar el dominio de la operación del dron.
- Su precio es asequible, lo que lo convierte en el dron de aprendizaje ideal para estudiantes y entusiastas.
Alta estabilidad
- Probado en diversas condiciones extremas durante tres años.
- Equipado con un marco de fibra de carbono de 3 mm de espesor para una mayor durabilidad y estabilidad.
- Permite a los usuarios obtener reconocimiento en su primera experiencia de competición.
Capacidad de expansión
- Admite personalización avanzada para diversas aplicaciones.
- Compatible con varios componentes de expansión para mejorar continuamente el rendimiento y la funcionalidad del dron.
Servicio posventa sin preocupaciones
- Equipo profesional que brinda orientación y apoyo integral.
- Ofrece reparaciones gratuitas por daños de hardware causados por errores operativos durante el período de garantía (excluyendo accesorios y baterías).
Personalizable
- Proporciona soporte para el desarrollo exclusivo en ROS y QGC.
- Admite una alta precisión de más del 98 % para mapeo y navegación.
- Compatible con módulos RTK/GPS, logotipos y varias funcionalidades únicas.

Configuración de la estación terrestre
Uso del controlador de vuelo Pixhawk 2.4.8
Equipado con el último procesador STM32F427 estándar de 32 bits y el barómetro MS5611, este controlador de vuelo ofrece abundantes interfaces y una alta relación costo-rendimiento como una opción de código abierto.
1. Estación terrestre QGC exclusiva y profundamente personalizada
- Logra más del 98% de localización al chino.
- Admite funciones avanzadas como NTRIP.
2. Estación terrestre móvil QGC
- Proporciona una versión móvil de la estación terrestre QGC, lo que permite una operación sin problemas desde un teléfono inteligente.
3. Conexión directa Wi-Fi o 4G
- Simplemente conéctese a través de Wi-Fi para operar usando un teléfono inteligente o una computadora.
- Nota:El sistema "ezuav" muestra que está conectado al dispositivo pero no puede proporcionar acceso a Internet.

Tutoriales completos y recursos totalmente de código abierto
- Tutoriales de uso extremadamente detallados que cubren todos los aspectos de la funcionalidad del dron S2-F290.
- Materiales totalmente de código abierto, incluidos:
- Introducciones de software y guías de instalación.
- Tutoriales sobre funciones básicas y avanzadas, como reconocimiento de objetos basado en OpenCV, mapeo 3D y vuelo autónomo fuera de borda.
- Instrucciones de desarrollo personalizadas para la comunicación PX4 y MAVLink.
- Preguntas frecuentes sobre resolución de problemas, configuración del entorno ROS y pasos operativos.
Related Collections


