









Módulo de articulación robótica SteadyWin GIM3510-8, engranaje planetario 8:1, controlador CAN, codificador dual, 24V 60W
Módulo de articulación robótica SteadyWin GIM3510-8, engranaje planetario 8:1, controlador CAN, codificador dual, 24V 60W
SteadyWin
No se pudo cargar la disponibilidad de retiro
Resumen
El SteadyWin GIM3510-8 módulo de articulación de robot pequeño es un actuador de articulación robótica integrado que combina un motor Aloha, un reductor de engranaje planetario 8:1, un controlador de comunicación incorporado y codificadores duales en un paquete cilíndrico compacto. Con un suministro nominal de 24 V (rango amplio de 12–40 V o 12–48 V dependiendo de la placa del controlador), alta velocidad de salida de hasta 564.6 rpm después de la reducción, y comunicación por bus CAN, está diseñado para robots humanoides ágiles, brazos robóticos, plataformas móviles y otros sistemas multi-ejes que requieren control de movimiento preciso en bucle cerrado.
Características clave
- Reducción planetaria de alta velocidad: Caja de engranajes planetarios 8:1 con velocidad de salida nominal de 535.5 rpm y máxima de 564.6 rpm (GDZ34), adecuada para articulaciones de movimiento rápido.
- Amplio rango de voltaje: Operación nominal de 24 V con rango de entrada de 12–40 V (GDZ34) o 12–48 V (GDS34) para un diseño flexible del sistema de energía.
- Salida de par eficiente: Constante de par de hasta 0.32 N.m/A con par nominal de hasta 1.68 N.m y par máximo de hasta 6.02 N.m, proporcionando una transmisión de potencia eficiente para juntas robóticas de carga ligera a media.
- Controlador integrado con bus CAN: Placa de controlador incorporada (GDS34 o GDZ34) que soporta comunicación CAN para un cableado simplificado y control en red.
- Retroalimentación de encoder dual: Encoder de 14 bits en el controlador y un segundo encoder en el eje de salida para una retroalimentación precisa de posición y velocidad.
- Estructura compacta: Solo 46 mm de diámetro exterior con una longitud total de 46.5 mm (sin controlador) a 51.5 mm (con controlador), permitiendo configuraciones densas de múltiples juntas.
- Durabilidad ambiental: Clasificación de protección IP54, temperatura de operación de -20°C a +80°C, y nivel de ruido por debajo de 60 dB.
- Funciones de protección: La protección contra sobretemperatura, sobrevoltaje y sobrecarga ayuda a mantener un funcionamiento seguro y confiable en sistemas robóticos de servicio continuo.
- Robustez mecánica: Soporta hasta 75 N de carga axial y 300 N de carga radial en el eje de salida, con un retroceso del reductor de 15 arcmin.
- Opción de freno personalizado: Soporta la integración de frenos personalizados para juntas que requieren par de retención cuando no están alimentadas.
Para soporte técnico, personalización o preguntas sobre la integración del módulo de junta de robot pequeño GIM3510-8, por favor contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Parámetro | Unidad | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Modelo | - | GIM3510-8 | GIM3510-8 |
| Modelo de placa de controlador | - | GDS34 (SDC101) | GDZ34 |
| Tensión nominal | V | 24 | 24 |
| Rango de tensión | V | 12–48 | 12–40 |
| Potencia nominal | W | 98 | 60 |
| Par de torsión nominal | N.m | 1.68 | 1.00 |
| Par máximo | N.m | 3.41 | 6.02 |
| Velocidad nominal después de la reducción | rpm | 430 | 535.5 |
| Velocidad máxima después de la reducción | rpm | 529 | 564.6 |
| Corriente nominal | A | 4.1 | 2.5 |
| Corriente máxima | A | 8.30 | 25.30 |
| Resistencia de fase | ohm | 0.48 | 0.48 |
| Inductancia de fase | mH | 0.31 | 0.31 |
| Constante de velocidad | rpm/V | 22.04 | 23.53 |
| Constante de par | N.m/A | 0.44 | 0.32 |
| Número de pares de polos | Pares | 7 | 7 |
| Relación de transmisión | - | 8:1 | 8:1 |
| Tipo de engranaje | - | Planetario | Planetario |
| Material del engranaje reductor | - | ALU | ALU |
| Juego del engranaje reductor | arcmin | 15 | 15 |
| Peso del motor sin controlador | g | 247.6 | 247.6 |
| Peso del motor con controlador | g | 259.6 | 259.6 |
| Tamaño sin controlador (diámetro x longitud) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Tamaño con controlador (diámetro x longitud) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Carga axial máxima | N | 75 | 75 |
| Carga radial máxima | N | 300 | 300 |
| Ruido | dB | <60 | <60 |
| Comunicación | - | CAN | CAN |
| Segundo encoder en el eje de salida | - | SÍ | SÍ |
| Grado de protección | - | IP54 | IP54 |
| Temperatura de funcionamiento | °C | -20 a +80 | -20 a +80 |
| Resolución del encoder (encoder del controlador) | bit | 14 | 14 |
| Soporte de encoder separado | - | NO | NO |
| Soporte de freno personalizado | - | SÍ | SÍ |
Manuales
- Diagrama de instalación de SteadyWin_GIM3510-8.stp
- GlM3510-8_dibujo_de_instalación.pdf
- Gl3510-8_con_freno_dibujo_de_instalación.pdf
Detalles

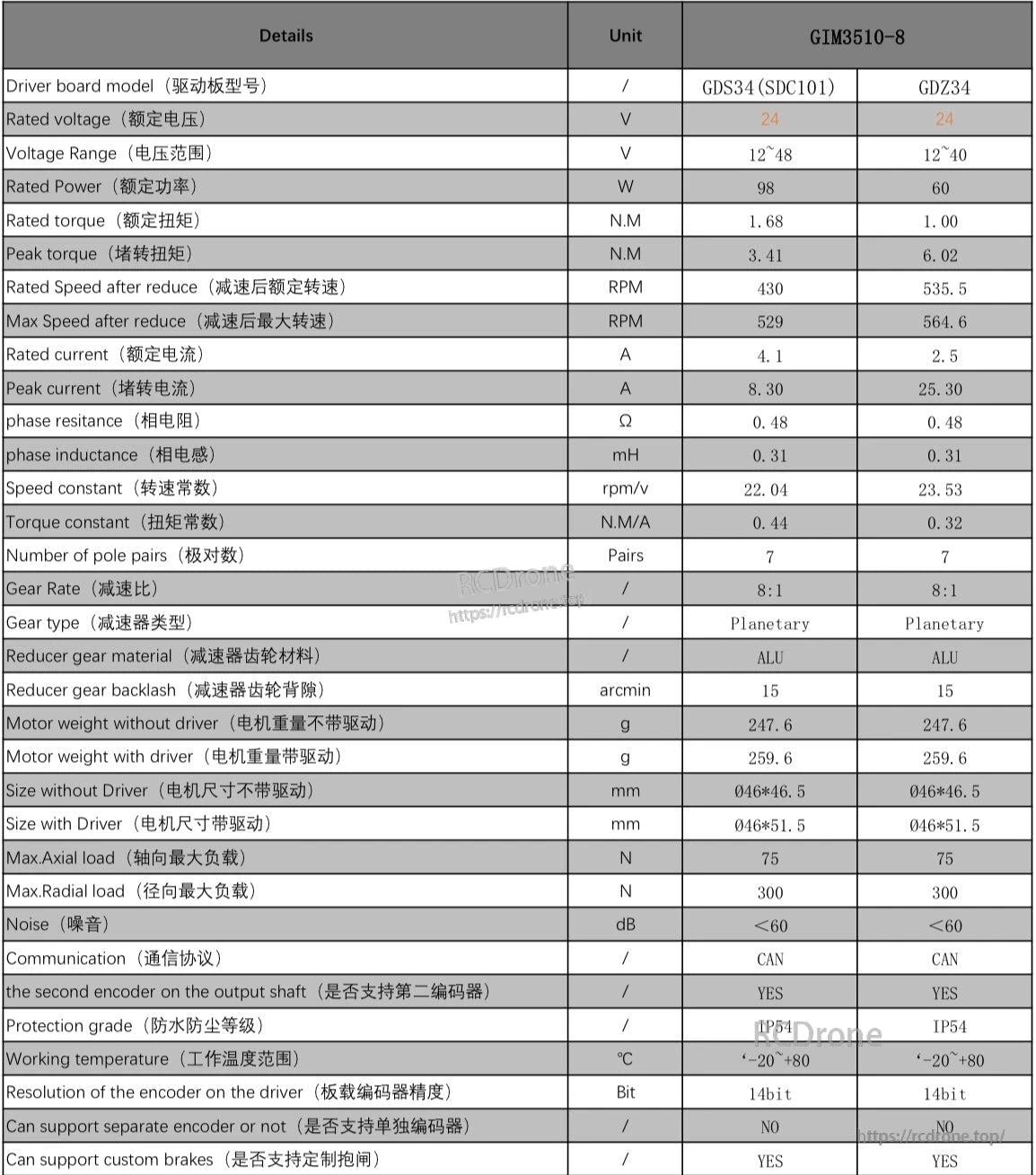
Especificaciones de la articulación del robot GIM3510-8 comparan las placas de control GDS34 y GDZ34. Las métricas clave incluyen voltaje, potencia, par, velocidad, corriente, peso, tamaño, capacidad de carga, ruido, comunicación, encoder, grado de protección, rango de temperatura y soporte de freno personalizado.
Related Collections









