Kit Pro de Servomotor para Brazo Robótico SO-ARM101 para LeRobot (Sin piezas impresas en 3D) – Open Source, 6 ejes, UART, codificador de 12 bits
Kit Pro de Servomotor para Brazo Robótico SO-ARM101 para LeRobot (Sin piezas impresas en 3D) – Open Source, 6 ejes, UART, codificador de 12 bits
Seeed Studio
No se pudo cargar la disponibilidad de retiro
Resumen
SO-ARM101 es un Kit de Motor Servo de Brazo Robótico Pro optimizado para el aprendizaje por imitación y refuerzo con proyectos de LeRobot y Hugging Face. Este kit de código abierto y bajo costo incluye motores servo, placas adaptadoras y cables para una configuración completa de brazo líder-seguidor. El kit es amigable para DIY y está diseñado para prototipos rápidos con abundantes recursos. Importante: el kit de motor no incluye piezas impresas en 3D; ordene el esqueleto impreso en 3D junto si es necesario. Seeed Studio proporciona hardware para LeRobot.
Características Clave
¿Qué hay de nuevo en SO-ARM101?
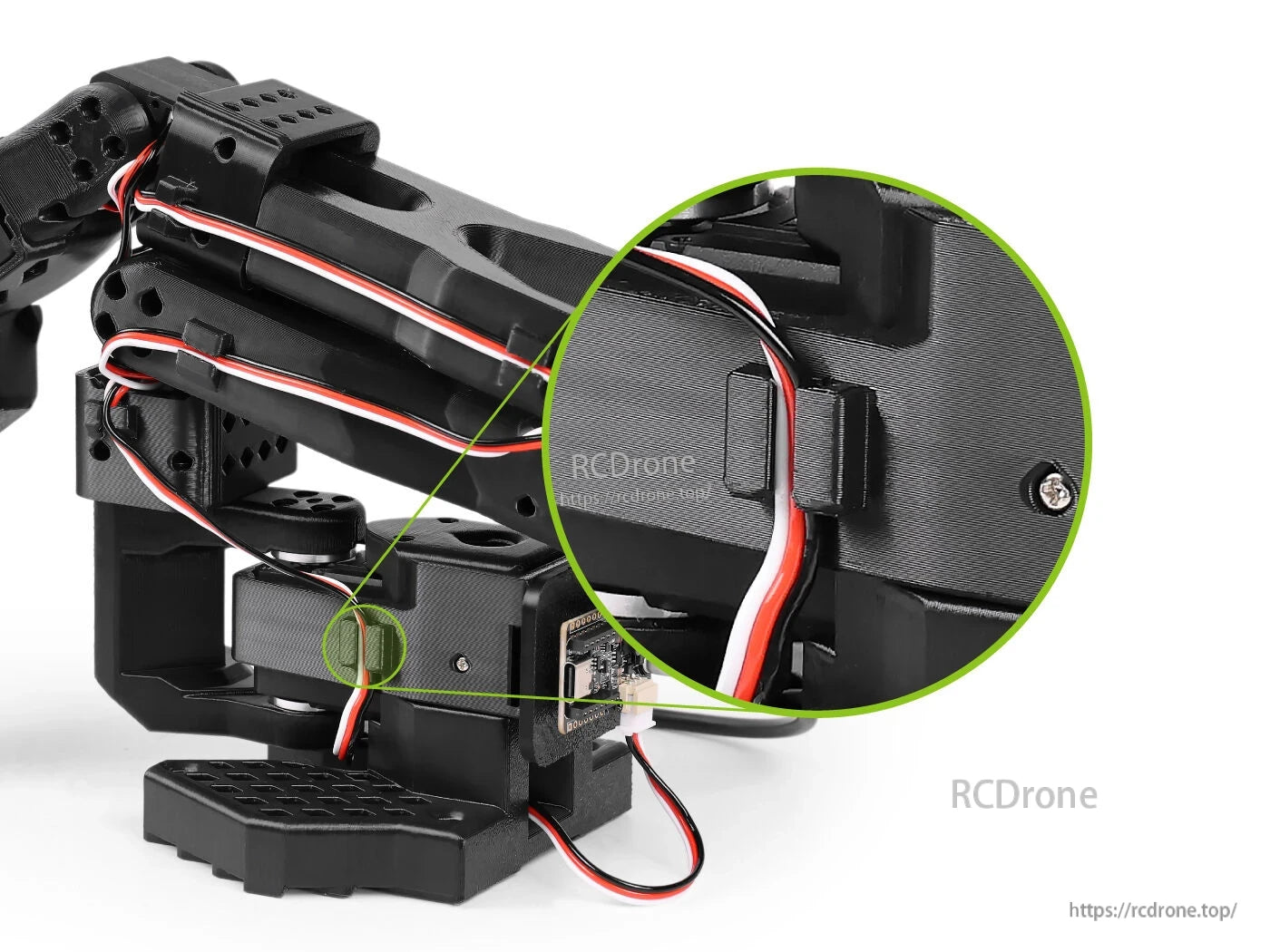
- Optimización del cableado: mitiga las desconexiones previamente vistas en la articulación 3 y elimina los límites de rango de movimiento.
- Relaciones de engranaje del brazo líder optimizadas: rendimiento mejorado sin cajas de engranajes externas.
- Nueva funcionalidad: el brazo líder puede seguir al brazo seguidor en tiempo real para apoyar políticas de RL e intervención humana.
Destacados de la serie SO-ARM10x
- Solución de código abierto y bajo costo de TheRobotStudio.
- Integración con la plataforma LeRobot (conjuntos de datos, modelos y herramientas basados en PyTorch para aprendizaje por imitación y aprendizaje por refuerzo).
- Recursos completos: guías de ensamblaje, calibración, pruebas, recopilación de datos, entrenamiento y despliegue.
- Compatible con Nvidia reComputer Mini J4012 Orin NX 16 GB.
- Brazos robóticos de 6 ejes (líder y seguidor) mostrados en los materiales del kit.
Especificaciones
| Tipo | Kit de brazo SO-ARM101 Pro |
| Motores del brazo líder (7.4V) | 1× relación de engranaje 1:345 (articulación No.2); 2× 1:191 (No.1 &y No.3); 3× 1:147 (No.4, No.5 &y pinza No.6) |
| Brazo seguidor | Igual que SO-ARM100 Pro |
| Fuente de alimentación (DC 5.5mm*2.1mm) | 12V2A para el brazo seguidor; 5V4A para el brazo líder |
| Sensor de ángulo | Encoder magnético de 12 bits |
| Temperatura de funcionamiento recomendada | 0℃~40℃ |
| Método de comunicación | UART |
| Método de control | PC |
Comparación
|
SO-ARM10x Bajo costo Kit de brazo AI y Kit de brazo Pro |
||||
|
Tipo |
SO-ARM100 |
SO-ARM101 |
||
|
Kit de brazo |
Kit de brazo Pro |
Kit de Brazo |
Kit de Brazo Pro |
|
|
Brazo Líder |
12x (7.4V) Motores de relación de engranaje 1:345 para todas las articulaciones |
12x (12V) Motores de relación de engranaje 1:345 para todas las articulaciones |
1x (7.4V) Motor de relación de engranaje 1:345 para la articulación No.2 |
|
|
2x (7.4V) Motores de relación de engranaje 1:191 para las articulaciones No.1 y No.3 |
||||
|
3x (7.4V) Motores de relación de engranaje 1:147 para las articulaciones No.4, No.5 y el agarre No.6 |
||||
|
Brazo seguidor |
Igual que SO-ARM100 |
Igual que SO-ARM100 Pro |
||
|
Fuente de alimentación |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A |
5.5mm*2.1mm DC 5V4A |
5.5mm*2.1mm DC 12V2A Para el Brazo Seguidor |
|
5.5mm*2.1mm DC 5V4A Para Leader Arm |
||||
|
Sensor de ángulo |
Encoder magnético de 12 bits |
|||
|
Rango de temperatura de operación recomendado |
0℃~40℃ |
|||
|
Método de comunicación |
UART |
|||
|
Método de control |
PC |
|||
Qué incluye
- Motor servo 7.4v STS3215 relación de engranaje 1:345 ×1
- Motor servo 7.4v STS3215 relación de engranaje 1:191 ×2
- 7.4v Motor Servo STS3215 relación de engranaje 1:145 ×3
- Motor Servo 12v STS3215 relación de engranaje 1:345 ×6
- Placa adaptadora de servo para Seeed Studio XIAO ×2
- Estudio ×8
- tornillo ×8
- Cable de alimentación de 5V (cabeza múltiple) × 1
- Cable de alimentación de 12V (cabeza múltiple) ×1
- Cable USB-C ×2
- Cable de pigtail de alimentación DC ×2
Aplicaciones
- Aprendizaje por imitación y aprendizaje por refuerzo con LeRobot: tuberías de extremo a extremo para la recolección de datos, entrenamiento, simulación y despliegue.
- Despliegue en el borde de Nvidia Jetson: entrenamiento eficiente de tareas personalizadas de agarre y colocación con reComputer J4012 Orin NX 16 GB.
Detalles

Kit de brazo robótico de 6 ejes con hardware de código abierto, compatible con reComputer Mini J4012 Orin NX 16GB.Apoya a LeRobot en Hugging Face para recursos comunitarios y aprendizaje por refuerzo imitativo, lo que permite la coordinación de todo el cuerpo. Facilita la recolección de datos, simulación y entrenamiento. Los códigos QR proporcionan acceso a GitHub, Wiki y archivos de impresión 3D para el esqueleto.

Kit de desarrollo NVIDIA Jetson Orin NX con brazos robóticos reComputer J40 y SO-ARM101, mostrando estadísticas del sistema y uso de GPU en el monitor.
Related Collections