CUAV RM3100 C-Compass Magnetómetro Externo de Alta Precisión para Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV RM3100 C-Compass Magnetómetro Externo de Alta Precisión para Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Precio habitual
$203.00 USD
Precio habitual
Precio de oferta
$203.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Resumen
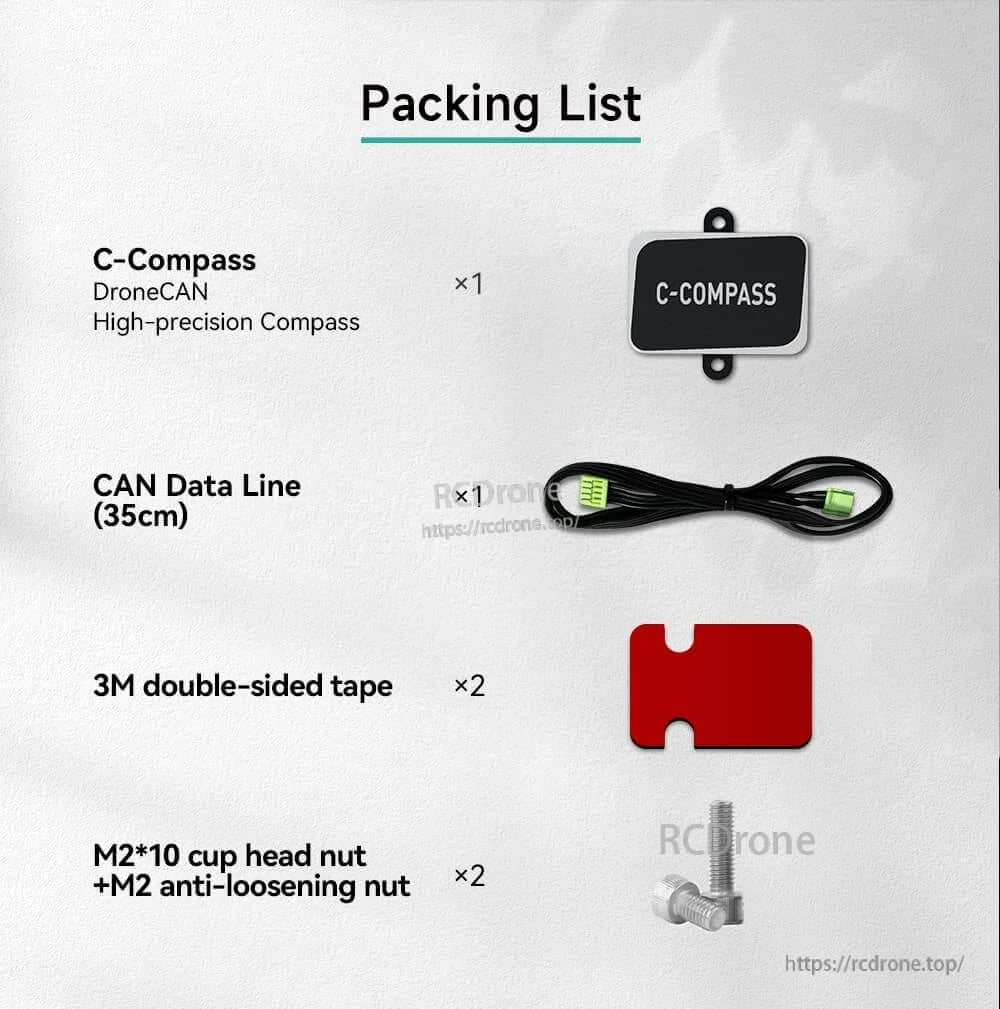
El CUAV C-Compass es una brújula externa (magnetómetro de alta precisión) construida alrededor del sensor magnético RM3100 para los ecosistemas de controladores Pixhawk y PX4. Utiliza comunicación por bus DroneCAN/UAVCAN y es compatible con las plataformas ArduPilot y PX4, con un procesador STM32F4 integrado que ejecuta la arquitectura de software CUAV M4C para una medición de rumbo estable en estructuras eléctricamente ruidosas.
Características Clave
- Sensor magnético RM3100
- Procesador STM32F4 integrado
- Arquitectura de software M4C desarrollada por CUAV
- Compatible con la plataforma de software de vuelo APM/PX4
- Soporte para el protocolo DroneCAN/UAVCAN
- Diseñado para un bajo ruido y rendimiento anti-interferencia cuando se utiliza como una brújula externa
Especificaciones
| MCU | STM32F412 (32 Bit Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Sensor | RM3100 |
| Arquitectura de Software | CUAV M4C |
| Protocolo | DroneCAN/UAVCAN |
| Tasa de Comunicación | 2Mb |
| Tasa de Actualización | 80Hz |
| Ruido | 15nT |
| Precisión | 0.25° (valor efectivo) |
| Precisión de Repetición | 0.05° |
| Resolución | 0.01° |
| sensibilidad | 13nT |
| Rango | -800 μT a +800 μT |
| Tipo de Controlador | PX4/ArduPilot (CUAV/Pixhawk etc.) |
| Interfaz | GHR-04V-S |
| Tensión de Funcionamiento | 4.75-5.3V |
| Temperatura de Funcionamiento | -20 a 80°C |
| Humedad de Funcionamiento | 5% a 95% (sin condensación) |
| Material de la Carcasa | Aleación de aluminio |
| Tamaño | 31.5 x 31.0 x 14.0mm |
| Peso | 13g |
| Peso listado | 0.5 kg |
| Dimensiones listadas | 20 x 10 x 10 cm |
Opciones
- C-Compás * 3 Pcs
- C-Compás & NEO 3 GPS / Set
- C-Compás & NEO 3 Pro GPS / Set
- C-Compás & NEO 3X GPS / Set
Aplicaciones
- Compás externo/sensado de rumbo para construcciones de piloto automático Pixhawk y CUAV que ejecutan PX4 o ArduPilot
- Mejorando la estabilidad de medición magnética al montarlo lejos de fuentes de interferencia (cables, baterías, motores)
Para preguntas sobre integración y compatibilidad (configuración DroneCAN/UAVCAN, parámetros ArduPilot/PX4, cableado), contacta [email protected] or visita https://rcdrone.top/ .
Related Collections