




MAD MAX2 140A HV 2-4S ESC sin escobillas con sensor, APP Bluetooth, BEC 6.0/7.4/8.4V para coche RC 1/10
MAD MAX2 140A HV 2-4S ESC sin escobillas con sensor, APP Bluetooth, BEC 6.0/7.4/8.4V para coche RC 1/10
MAD
No se pudo cargar la disponibilidad de retiro
Resumen
ESC sin escobillas sensorizado MAD MAX2 140A HV 2-4S para uso en modelos de coches RC 1/10. Soporta control de motores sin escobillas con sensor o sin sensor, con Bluetooth integrado para la configuración de parámetros de la APP móvil, lectura de datos y actualización de firmware.
Características clave
- Corriente continua: 140A (con limitación de corriente de ciclo PWM para reducir el impacto de la corriente de pulso en el motor)
- Entrada de batería / potencia: 2~4S LiPo (el uso de fuente de alimentación DC requiere considerar la capacidad de descarga y recuperación de potencia)
- Bluetooth integrado: ajustar parámetros del ESC, actualizar firmware y observar datos de operación del motor (registro de datos + datos en tiempo real) a través de la APP móvil
- BEC (conmutable a través de la APP móvil): 6.0V / 7.4V / 8.4V; 5A continuo, 10A a corto plazo
- Control del ventilador: el ventilador se enciende cuando la temperatura > 55C; se apaga cuando la temperatura < 50C; la alimentación del ventilador se corta si ocurre una anormalidad de corriente alta
- Texto de diseño de refrigeración: función de inicio/parada inteligente del ventilador (inicio automático a la temperatura establecida para reducir el ruido)
- Grabación en tiempo real: funcionalidad de grabación de datos en tiempo real incorporada a través de la APP móvil
- Temporización turbo: disponible (máximo soporte 26)
- Protección: bajo voltaje, sobrevoltaje, pérdida de acelerador, frenado anormal, sobretemperatura, etc.
- Nivel de impermeabilidad: IP67 (capacidad de operación en todas las condiciones climáticas)
- Protocolo XC BUS / X.BUS protocolo: soporta control en tiempo real de ESC y lectura de datos de operación a través del bus (para control de automatización/robots u otro control programado)
Para soporte de configuración o preguntas de compatibilidad, contacta https://rcdrone.top/ o envía un correo electrónico a [email protected].
Especificaciones
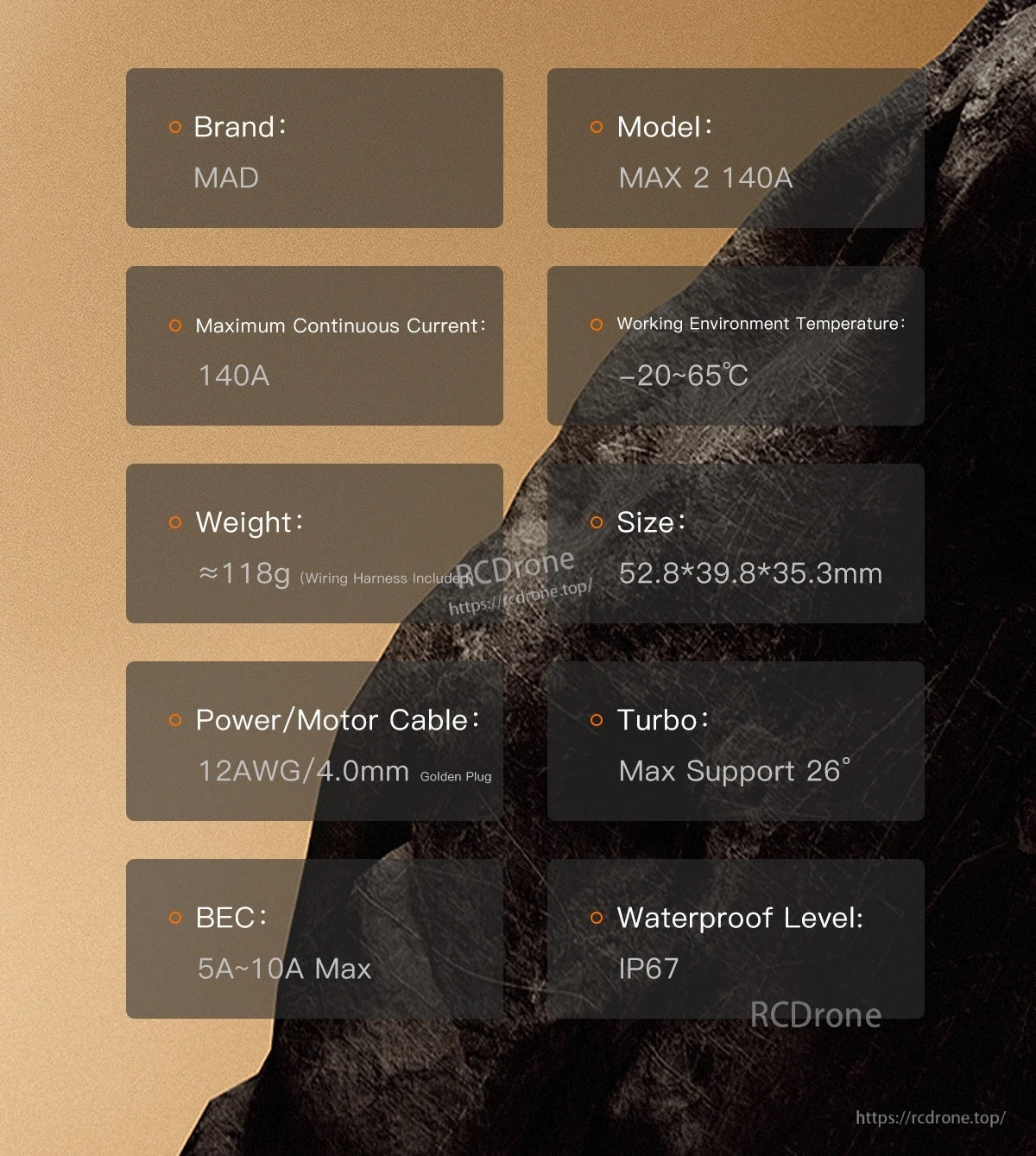
| Modelo | MAX 2 140A |
| Marca | MAD |
| Corriente continua | 140A |
| Fuente de alimentación | 2~4S LiPo |
| Motor recomendado | Control de onda cuadrada con o sin sensor para motores sin escobillas |
| Velocidad eléctrica máxima | 240,000rpm |
| Tensión BEC | 6.0V / 7.4V / 8.4V (conmutable a través de la APP móvil) |
| Corriente BEC | 5A continuo, 10A a corto plazo |
| BEC (texto de imagen) | 5A~10A Máx |
| Control del ventilador | Encendido: temperatura > 55C; Apagado: temperatura < 50C; el ventilador se apaga durante anormalidades de corriente alta |
| Notas del ventilador | Ventilador alimentado por BEC; si ocurre un cortocircuito en el ventilador, se corta la alimentación y se recupera en 1 segundo |
| Bluetooth | Ajuste de parámetros de la APP; actualización de firmware de la APP; observación de datos de operación del motor (registro de datos + datos en tiempo real) |
| Turbo | Máx soporte 26 |
| Nivel de impermeabilidad | IP67 |
| Temperatura del entorno de trabajo | -20~65C |
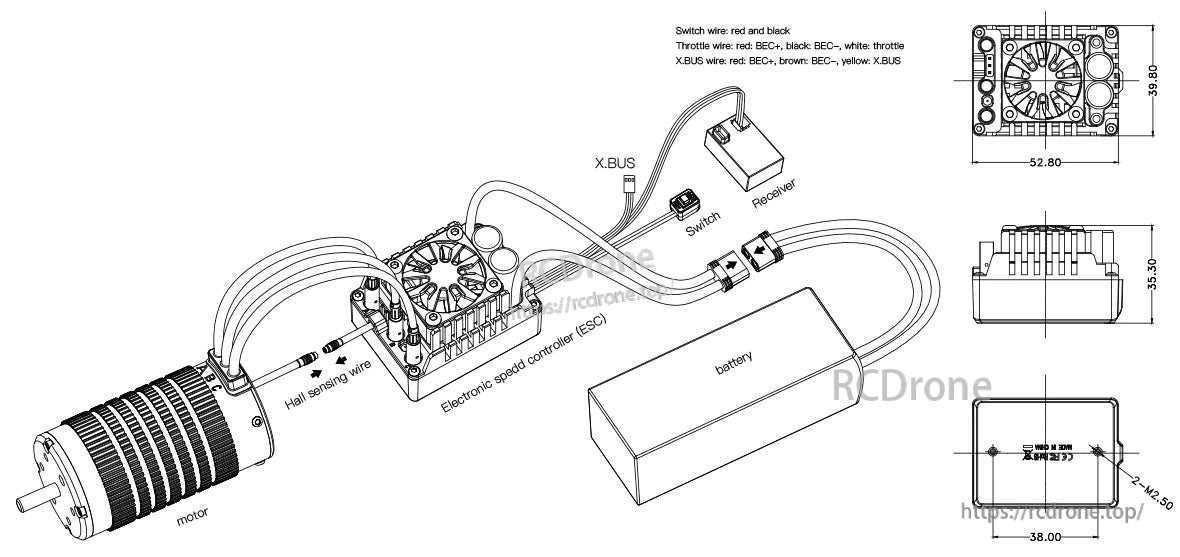
| Dimensiones | 52.80(L) x 39.80(W) x 35.30(H) mm |
| Tamaño (texto de imagen) | 52.8 x 39.8 x 35.3 mm |
| Peso | 118g (con cable) / 118g (arnés de cableado incluido) |
| Cable de alimentación/motor (texto de imagen) | 12AWG / 4.0mm Conector dorado |
| Montaje (texto de dibujo) | 38.00; 2-M2.50 |
| Nota de velocidad del motor | Velocidad eléctrica = Velocidad mecánica x Número de pares de polos = Valor KV x Voltaje del bus x Número de pares de polos (cuando los pares de polos = 1, la velocidad eléctrica es igual a la velocidad mecánica) |
Artículos configurables (a través de la APP)
| Artículo | Rango / Opciones | Predeterminado |
| Modo de funcionamiento | Adelante con freno / Adelante&Reversa y freno / Adelante con reversa | Adelante&Reversa y freno |
| Celdas Lipo | Auto / 2~4S | Auto |
| Tensión BEC | 6.0V / 7.4V / 8.4V | 6V |
| Tensión de corte | Desactivado / 2.9~3.6V | 3.2V |
| Rotación del Motor | Adelante / Atrás | Adelante |
| Max.Brake Fuerza | 0~100% | 60% |
| Max.Reverse Fuerza | 0~100% | 25% |
| Golpe | 0~12 niveles | 6 niveles |
| Fuerza de Freno de Arrastre | 0~100% | 0% |
| Temporización Turbo | 0~26 grados | 26 grados |
| Retraso Turbo | 0~1S | 1s |
| PWM Inicial | 1~10% | 5% |
| Pares de Polos del Motor | 1~64 | 2 |
| BUS de Comunicación | X.BUS Protocolo | X.BUS Protocolo |
| X.BUS-ID | 0~15 | 0 |
Conexiones
- Cable de interruptor: rojo y negro
- Cable de acelerador: rojo = BEC+, negro = BEC-, blanco = acelerador
- X.BUS cable: rojo = BEC+, marrón = BEC-, amarillo = X.BUS
- Etiquetas del diagrama del sistema: motor, cable de detección Hall, Controlador Electrónico de Velocidad (ESC), X.BUS, interruptor, receptor, batería
Configuración
Iniciar el proceso
- Verifique si el circuito está abierto, en cortocircuito o en mal contacto.
- Verifique si el motor está atascado.
- Conecte el cable de alimentación.
- Encienda el botón de encendido.
Cuando se escuche el tono de aviso de batería (descrito en los avisos de inicio normal), el inicio es normal. Si el acelerador es normal, se puede proceder con la operación del acelerador.
Establezca el rango del acelerador
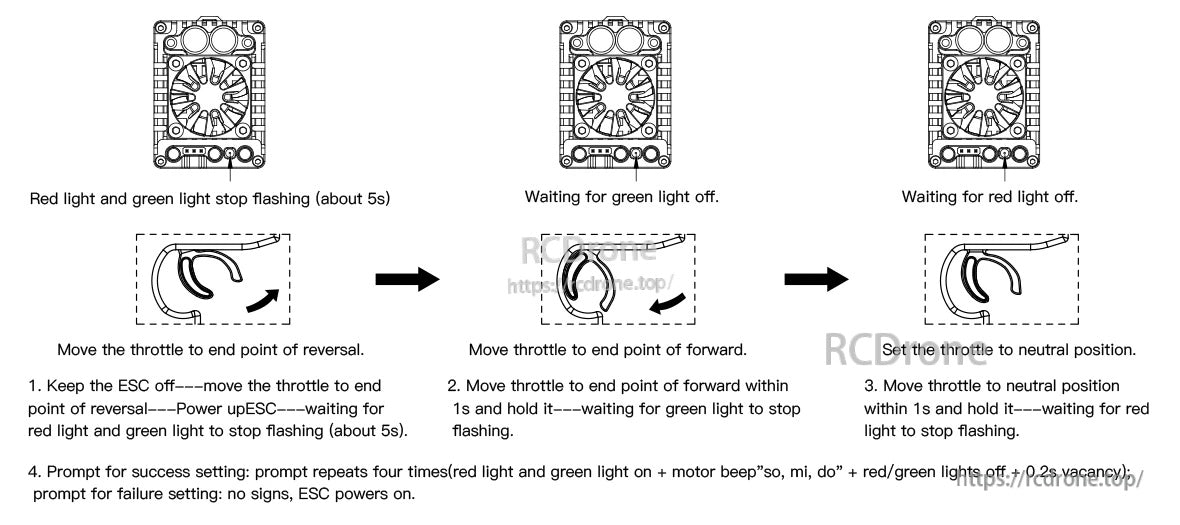
- Mantenga el ESC apagado, mueva el acelerador al punto final de reversa, luego encienda el ESC. Espere a que la luz roja y la luz verde dejen de parpadear (aproximadamente 5s).
- Mueva el acelerador al punto final de avance dentro de 1s y manténgalo. Espere a que la luz verde deje de parpadear (esperando que la luz verde se apague).
- Mueva el acelerador a la posición neutral dentro de 1s y manténgalo. Espere a que la luz roja deje de parpadear (esperando que la luz roja se apague).
- El aviso de éxito se repite cuatro veces: (luz roja y luz verde encendidas + pitido del motor "so, mi, do" + luces roja/verde apagadas + 0.2s de vacío). Aviso de fallo: sin señales, el ESC se enciende.
Regla de Nomenclatura Bluetooth
El formato del nombre Bluetooth es: modelo aproximado + "-" + ID de código ESC. Ejemplo: "XC_E3-1C89" donde "XC_E3" es el modelo aproximado y "1C-89" es el ID de código hexadecimal. Incluso si se cambia el nombre, el ID de código ESC permanece para evitar nombres duplicados.
Recuperar Parámetros de Fábrica
Restaurar Bluetooth a la configuración de fábrica
- Conectar el cable ESC (cable blanco) a BEC+ (cable rojo).
- Encender el ESC.
- Desconectar de BEC cuando la luz verde esté apagada y la luz roja esté encendida.
- Eliminar el cortocircuito.
Cuando se activa el arranque, Bluetooth se restaura al valor de fábrica (la contraseña se restablece a 1234 y el nombre vuelve al estado de fábrica). Reinicie el ESC. Si hay un error de hardware, el arranque se puede activar de esta manera para actualizar el hardware.
Restaurar parámetros a la configuración de fábrica
Utilice el botón predeterminado en la página de parámetros de la APP.
Estado LED & Instrucciones de Beep
| Tipo | Señal de luz | Señal de sonido | Observación |
| El acelerador no está en cero | La luz roja parpadea rápidamente | Tono largo "beep" | La luz roja parpadea rápidamente |
| Señal del acelerador perdida | La luz roja parpadea lentamente | Tono largo "beep" | En un ciclo de 2s |
| Protección de bajo voltaje | (Rojo x1 Verde x2) ... | Tono largo "beep" x1, Tono corto "beep" x2 | Verifique el voltaje de entrada o la configuración de la celda si no hay "beep" antes de detectar el MOSFET |
| Protección contra sobrevoltaje | (Rojo x1 Verde x3) ... | Nil | Voltaje demasiado alto; verifique el valor de resistencia del ESC |
| MOS sobre temperatura (operando > 125C / inicio > 110C) | (Rojo x1 Verde x4) ... | Beep largo x1, beep corto x4 | Se reanuda cuando la temperatura baja de 100C |
| Capacitor sobre temperatura (operando > 105C / inicio > 100C) | (Rojo x1 Verde x5) ... | Beep largo x1, beep corto x5 | Se reanuda cuando la temperatura baja de 100C |
| Parámetros de acelerador anormales | (Rojo x1 Verde x7) ... | Beep largo x1, beep corto x7 | Inicie la calibración del acelerador si persiste |
| Anomalía en la lógica de salida Hall | (Rojo x1 Verde x8) ... | Beep largo x1, beep corto x8 | Vuelva a conectar el cable Hall; si persiste, desconecte el cable Hall |
| Calibración exitosa | (Rojo Verde) x4 | (do-re-mi) x4 | Si la calibración es irregular/no exitosa, el ESC sale de la calibración y entra en el inicio normal |
| Normal (sin acción del acelerador) | (Verde) ... | Nulo | |
| Operación del acelerador (normal) | Verde parpadea más rápido con más acelerador | Nulo | |
| Temporización de turbo activada | La luz verde permanece encendida | Nulo | |
| Frenado | La luz roja está encendida | Nulo | La luz roja se apaga al soltar el freno |
| Arranque en progreso | Verde: encendido 2s & apagado 2s; Rojo permanece parpadeando | Nulo | Duración del rojo = tiempo de operación de parpadeo |
| Indicación de batería de arranque normal | Señal de luz de indicación quinaria (tono largo con rojo; tono corto con verde) | do, mi, so + sonido de indicación quinaria | Tono largo = 5 celdas; tono corto = 1 celda (ejemplo mostrado: 8 celdas = largo x1 + corto x3) |
| Circuito abierto de MOS | (Rojo x2) ... | Nil | Desconecte el cable del motor; si sigue anormal, se requiere inspección |
| Cortocircuito MOS | (Rojo x2 Verde x1) ... | Nil | Desconecte el cable del motor; si sigue anormal, se requiere inspección |
| Circuito de muestreo de corriente anormal | (Rojo x2 Verde x2) ... | Nil |
Notas:
1) La luz roja coincide con un tono largo; la luz verde coincide con un tono corto.
2) Para ahorrar energía, todos los pitidos duran 5 minutos; si los fallos se recuperan, vuelve a tener efecto en los próximos 5 minutos.
3) "..." en la señal luminosa indica repetición.
Precauciones
- No conecte los cables de entrada del ESC DC+ y DC- al revés. La conexión inversa puede dañar el ESC; no se proporciona servicio de garantía en este caso.
- Si se utiliza un sensor Hall, verifique los cables de fase del motor y el cableado del Hall.
- Para motores sin sensores de temperatura, el funcionamiento a alta potencia a largo plazo puede causar quemaduras.
- Algunos motores no pueden soportar alta velocidad debido a la estructura mecánica; forzar una velocidad más alta puede dañar el motor.
- Si no se utiliza durante más de 1 hora, desconecte los cables de alimentación del ESC.
- Después de modificar las líneas de conexión, verifique el circuito cuidadosamente antes de usar. Abra el acelerador lentamente y confirme que no hay errores antes de la operación normal.
Calibración del Acelerador
Detalles
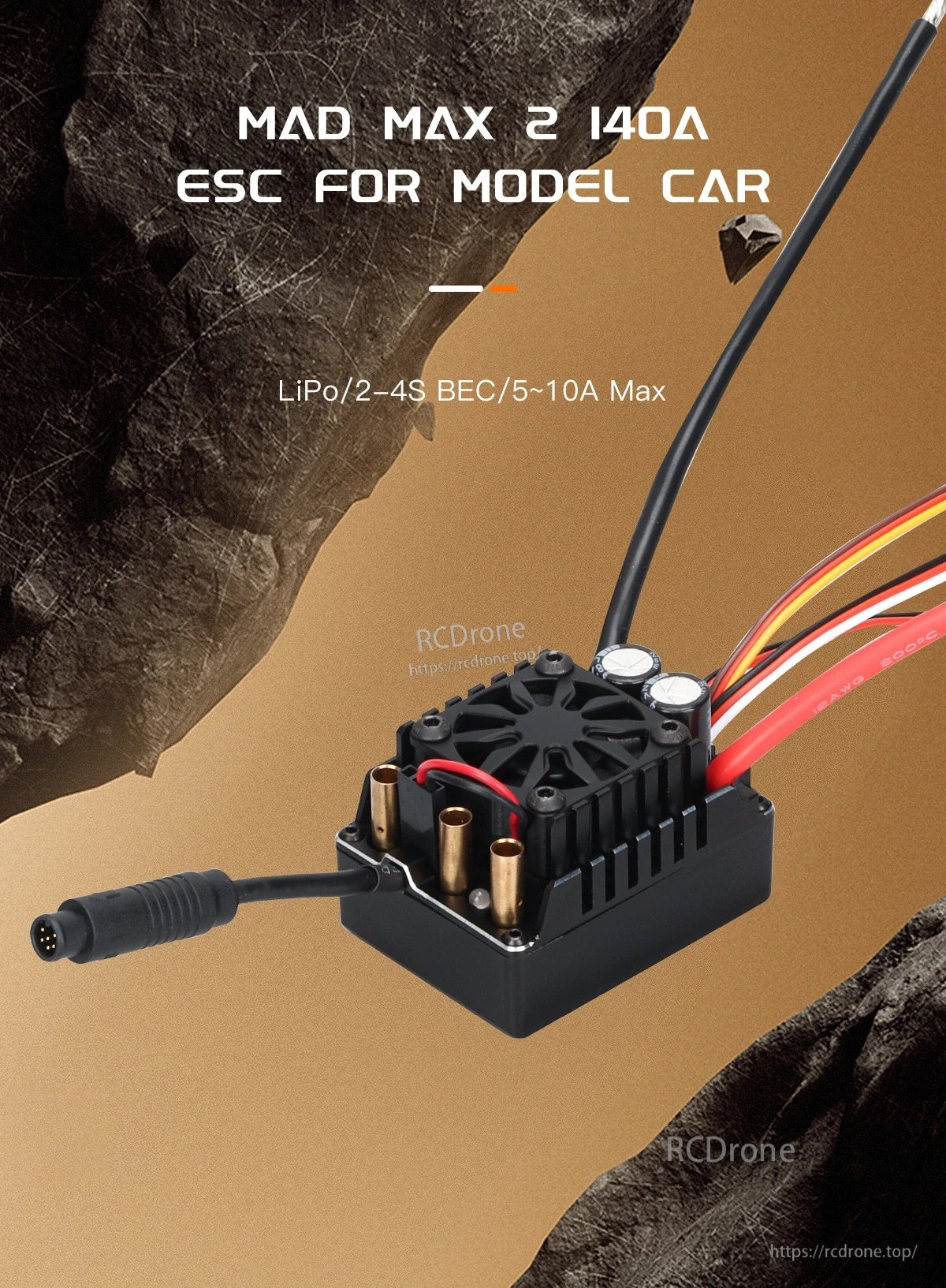
El ESC MAD MAX2 140A cuenta con un ventilador de enfriamiento integrado y soporte etiquetado para LiPo 2–4S con BEC de hasta 5–10A máximo.

El ESC sin escobillas con sensor MAD MAX2 utiliza un diseño de enfriamiento inteligente con un ventilador que se enciende y apaga automáticamente según la temperatura.

El ESC sin escobillas con sensor MAD MAX2 cuenta con transmisión Bluetooth integrada para la configuración de parámetros de la aplicación móvil, lectura de datos y actualizaciones de firmware.
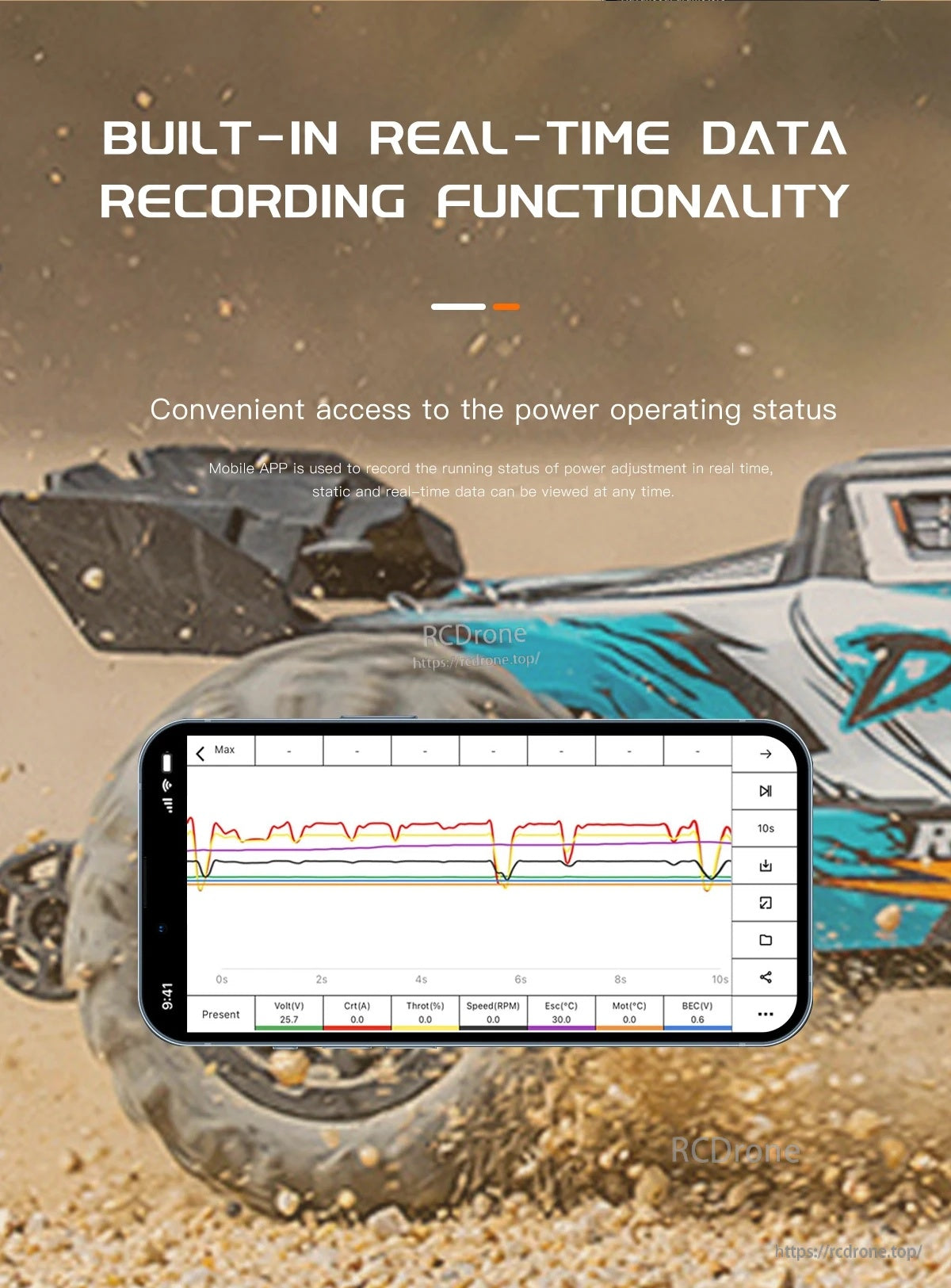
La grabación de datos en tiempo real integrada te permite revisar las tendencias de potencia y rendimiento en un registro estilo gráfico.
El ESC MAD MAX2 incluye un BEC integrado con una capacidad de hasta 10A y salida seleccionable de 6V o 7.4V para alimentar servos HV.
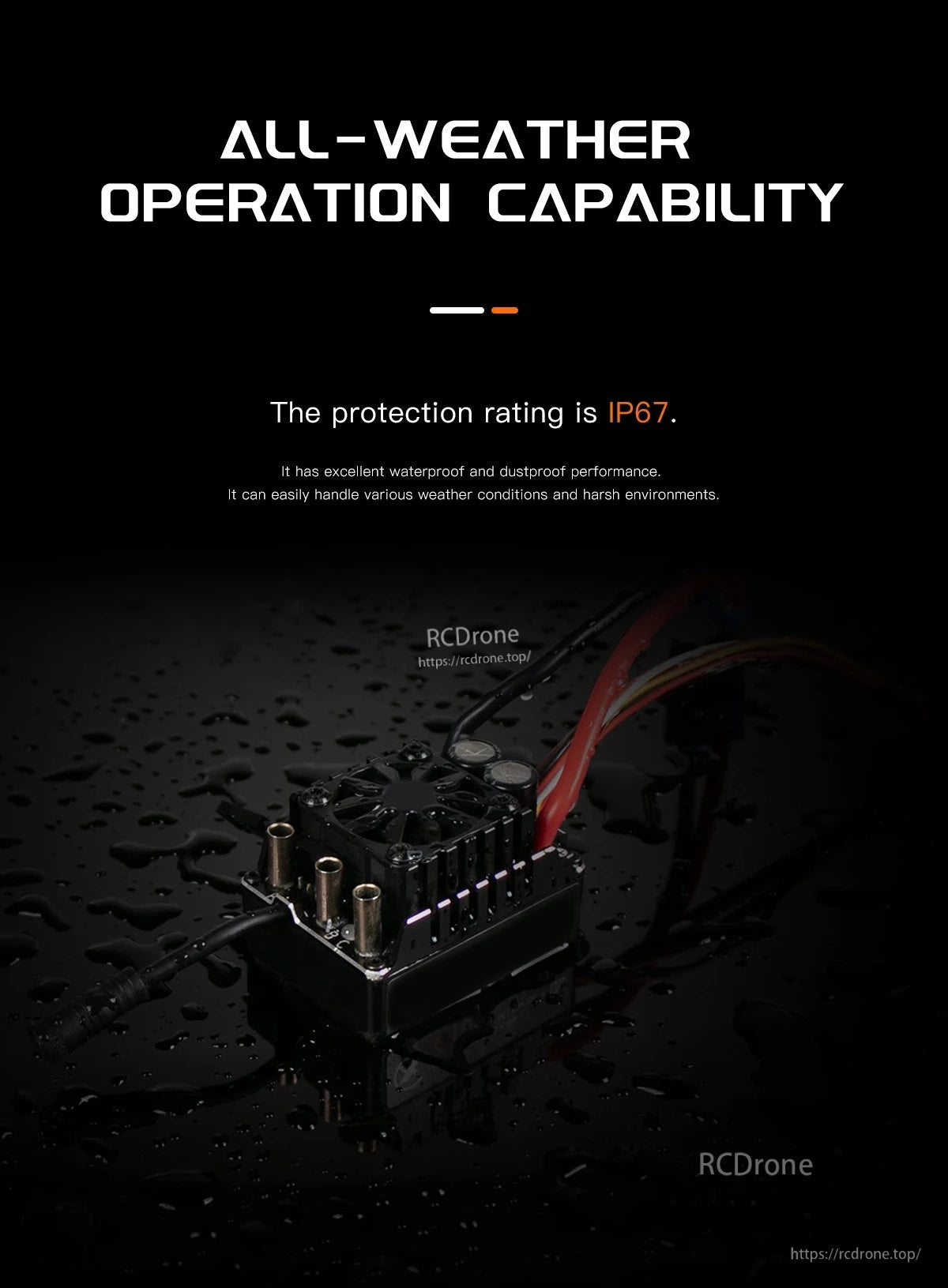
El ESC sin escobillas con sensor MAD MAX2 tiene una clasificación IP67 para operación en todas las condiciones climáticas en entornos difíciles.

El ESC sin escobillas con sensor MAD MAX2 de 140A cuenta con un ventilador de refrigeración montado en la parte superior, 3 conectores de bullet para motor y un cable de sensor para un cableado limpio en coches RC.
Especificaciones del ESC MAD MAX2 140A incluyen impermeabilidad IP67, un cuerpo de 52.8×39.8×35.3mm y un rango de temperatura de trabajo de -20 a 65°C.
El diseño del ESC sensorizado MAD MAX2 140A HV incluye conexiones etiquetadas para el motor, batería, receptor/conexión del acelerador, XBUS, interruptor y puerto de programación, además de las dimensiones generales para el montaje.
La configuración del rango del acelerador del ESC sensorizado MAD MAX2 utiliza las indicaciones de LED rojo y verde mientras ajustas los puntos finales del acelerador en reversa, adelante y neutro.
Related Collections




