




Conjunto de brazos para dron MAD 9x-12 Sistema de propulsión coaxial: M9C12 100KV, ESC FOC circular 60A, hélice 30x10
Conjunto de brazos para dron MAD 9x-12 Sistema de propulsión coaxial: M9C12 100KV, ESC FOC circular 60A, hélice 30x10
MAD
No se pudo cargar la disponibilidad de retiro
Resumen
MAD 9x-12 es un conjunto de brazos de dron diseñado como un sistema de potencia coaxial superior e inferior para aeronaves multirrotor. Está desarrollado para una carga de eje único de 4.5–6 kg, centrándose en la eficiencia de fuerza, la seguridad y la resistencia en condiciones extremas, y es adecuado para aeronaves que utilizan un tubo de carbono de 30 mm de diámetro.
Características clave
- Sistema de propulsión integrado con diseño modular de un solo brazo para una instalación conveniente y una estructura confiable.
- Diseño de motor de disco (M9C12) con diseño de núcleo de hierro y rodamientos EZO (Japón) y tecnología de ensamblaje destinada a reducir la holgura axial/radial para un funcionamiento estable.
- Modulación eléctrica de onda sinusoidal inteligente utilizando un regulador eléctrico inteligente Circular 60A FOC con protecciones que incluyen sobrevoltaje, sobrecorriente, sobretemperatura, rotor bloqueado, cortocircuito y desconexión del motor.
- Luz de dirección LED roja/verde integrada en la parte inferior del paquete de energía.
- Hélice de fibra de carbono (Fluxer 30x10.0 Pro) con proceso de tratamiento de luz espejo y diseño de balance dinámico.
Para verificaciones de compatibilidad previas a la venta (integración de Ardupilot/DroneCAN, longitud del cableado, ajuste de tubo de 30 mm) o soporte post-venta, contacta https://rcdrone.top/ o envía un correo electrónico a [email protected].
Especificaciones
Sistema (9X12 KV100)
| Artículo | Especificación |
|---|---|
| Empuje máximo | 11952 g / rotor @48v (nivel del mar) |
| Peso de despegue recomendado | 4400 g–6200 g / rotor @48v (nivel del mar) |
| Voltaje recomendado | 12S Lipo |
| Temperatura de operación | -20~60C |
| Peso combinado de la unidad | 830 g |
| Longitud del cable de extensión | 1300 mm / 1300 mm (Cables de entrada/señal) |
| Tubo de carbono compatible | 30 mm |
Hélice
| Artículo | Especificación |
|---|---|
| Diámetro / paso | 30x10.0 pulgadas (762x254 mm) |
| Peso de la unidad | 93 g (p/p) |
Motor
| Artículo | Especificación |
|---|---|
| Tamaño del estator | 91x12 mm |
| Peso de la unidad | 483 g |
FOC ESC
| Artículo | Especificación |
|---|---|
| Nombre del modelo | Circular 60A FOC |
| Voltaje de entrada máximo | 60.9 V |
| Corriente máxima permitida | 60A (10S) |
| Corriente continua máxima | 30A |
| Frecuencia máxima de señal de aceleración | 450 Hz |
| Voltaje recomendado | 12S |
| Compatibilidad | Ardupilot |
| Comunicación CAN | DroneCan |
Dibujo del producto (dimensiones)
| Artículo | Dimensión |
|---|---|
| Envergadura total de la hélice | 813.70 |
| Diámetro del motor/módulo | Ø98.5 |
| Longitud del módulo | 63.05 |
| Dimensión vertical | 75.25 |
| Dimensión vertical | 25.85 |
| Altura de la abrazadera del tubo | 39 |
| Diámetro de tubo compatible | Ø30 |
| Patrón de montaje | Ø23-M4*4 |
| Patrón de montaje | Ø20-M3*4 |
Referencia (12S)
Configuración: MAD 9X12 100KV + FLUXER PRO 30x10 MATT + Circular FOC 60A (6-14S) MAX: 81C
| Acelerador [%] | Voltaje [V] | Corriente [A] | Poder de entrada [W] | Poder de salida [W] | Par [N×m] | RPM | Empuje [gf] | Eficiencia [%] | Eficiencia [gf/W] |
|---|---|---|---|---|---|---|---|---|---|
| 30 | 48.76 | 2.38 | 116.0 | 85.8 | 0.576 | 1422 | 1722 | 74.0 | 14.8 |
| 35 | 48.88 | 3.69 | 180.4 | 138.4 | 0.793 | 1667 | 2372 | 76.7 | 13.1 |
| 40 | 48.52 | 5.42 | 263.0 | 209.8 | 1.058 | 1894 | 3155 | 79.8 | 12.0 |
| 45 | 48.30 | 7.22 | 348.7 | 284.5 | 1.288 | 2109 | 3813 | 81.6 | 10.9 |
| 50 | 48.14 | 9.30 | 447.7 | 369.5 | 1.524 | 2318 | 4483 | 82.6 | 10.0 |
| 55 | 48.04 | 11.77 | 565.4 | 475.9 | 1.807 | 2515 | 5251 | 84.2 | 9.3 |
| 60 | 47.95 | 15.13 | 725.5 | 617.3 | 2.185 | 2698 | 6228 | 85.1 | 8.6 |
| 65 | 47.84 | 18.63 | 891.3 | 756.0 | 2.512 | 2874 | 7346 | 84.8 | 8.2 |
| 70 | 47.76 | 21.48 | 1025.9 | 870.8 | 2.731 | 3045 | 7960 | 84.9 | 7.8 |
| 75 | 47.59 | 26.83 | 1276.8 | 1077.4 | 3.207 | 3208 | 9223 | 84.4 | 7.2 |
| 80 | 47.46 | 31.41 | 1490.7 | 1243.8 | 3.534 | 3361 | 10070 | 83.4 | 6.8 |
| 85 | 47.31 | 36.14 | 1709.8 | 1413.6 | 3.847 | 3509 | 10849 | 82.7 | 6.3 |
| 90 | 47.18 | 40.94 | 1931.5 | 1582.0 | 4.139 | 3650 | 11545 | 81.9 | 6.0 |
| 95 | 47.12 | 42.80 | 2016.7 | 1640.3 | 4.230 | 3703 | 11742 | 81.3 | 5.8 |
| 100 | 47.10 | 42.82 | 2016.8 | 1637.7 | 4.221 | 3705 | 11952 | 81.2 | 5.9 |
Utilice el tren motriz correctamente de acuerdo con los parámetros de rendimiento anteriores. Se recomienda volar con el peso de despegue recomendado para un mejor rendimiento. No vuele con sobrepeso. Si el peso de despegue excede 1.2 veces el valor máximo recomendado, el rendimiento y la seguridad se verán seriamente afectados.
Solución de problemas (Indicador LED/Sonido)
| Indicador LED/Sonido | Causa | Solución |
|---|---|---|
| El motor no gira después de que la aeronave se desbloquea, sino solo después de que se aumenta el acelerador. | El valor de acelerador en reposo de la salida del control de vuelo o del control remoto desbloqueado es menor de 1100us. | Establezca el valor de acelerador en reposo del control de vuelo o del control remoto en más de 1100us. Se recomienda 1160us~1180us. |
| Cuando el avión está encendido, conecte el control remoto y el motor gira. | El control remoto está configurado para bloquear el acelerador por encima de 1100us, o cerca de 1100us. | El control remoto necesita configurar el bloqueo del acelerador en menos de o igual a 1050us. |
| Cuando la auto-prueba de encendido falla, el motor "emite un beep" cada 1.5 segundos, y la luz indicadora parpadea en amarillo brevemente. | La señal PWM del acelerador está ausente o el rango de identificación PWM del acelerador es incorrecto. | Asegúrese de que el cable de señal del acelerador esté correctamente conectado y verifique si el cable de señal está dañado. |
| Cuando la auto-prueba de encendido falla, el motor "emite un beep" cada 0.5 segundos, y la luz indicadora parpadea en amarillo brevemente. | Detecta un acelerador alto al recibir energía y entra en estado protegido. | Asegúrese de que la auto-prueba eléctrica pase antes de levantar el acelerador. |
| El motor no suena. La luz indicadora parpadea en amarillo 4 veces cada 1.5 segundos: “corto - corto - corto - largo”. | Si la prueba de autodiagnóstico al encender falla, el bucle de línea del motor puede estar desconectado. | Abra la tapa del ESC y verifique si los tres cables del motor están bien soldados. |
| El motor no suena. La luz indicadora parpadea en amarillo 4 veces cada 1.5 segundos: “largo - corto - largo - corto”. | La prueba de autodiagnóstico al encender falla y la tensión de la fuente de alimentación es anormal. | Verifique si la tensión de la batería es normal. Verifique si el cable de alimentación está correctamente conectado. |
| El motor no suena. La luz indicadora parpadea en amarillo 4 veces cada 1.5 segundos: otros métodos de parpadeo. | La prueba de autodiagnóstico al encender falla y el hardware eléctrico es anormal. | Grabe un video del modo de parpadeo del LED y contacte al servicio al cliente para obtener asistencia. Reemplace el ESC y pruebe nuevamente si es necesario. |
| La auto-prueba de encendido es normal, el motor no gira después de desbloquear, y la luz indicadora es amarilla durante 0.5 segundos - el motor no suena cuando la luz indicadora está apagada durante 0.5 segundos. | Fallo en el arranque del motor, ocurrió protección de bloqueo durante el arranque. | Apague y encienda nuevamente y reinicie la fuente de alimentación. Si vuelve a aparecer, verifique si el motor está dañado. |
| La auto-prueba de encendido es normal, el motor no gira durante la operación, luz indicadora: 0.5 segundos luz amarilla - 0.5 segundos apagada, el motor no suena. | El motor está bloqueado y ha entrado en estado de protección. | Verifique si la máquina está bloqueada y verifique si el motor se mueve suavemente a mano. |
| La auto-prueba de encendido es normal, el motor no arranca o se detiene a mitad de camino, luz indicadora: 1 segundo luz amarilla - 1 segundo apagada, el motor no suena. | Se produce protección contra cortocircuitos o sobrecorriente, y el dispositivo entra en estado de protección. | Desmonte la cubierta de ajuste eléctrico y verifique si el cable del motor está dañado y si el terminal de cobre del cable del motor está suelto. |
| La luz indicadora parpadea alternativamente en rojo y verde durante el funcionamiento. | Falta la señal de acelerador PWM. | Aterriza de forma segura y verifica si la línea de señal PWM está bien conectada y si la línea de señal está dañada. |
| La luz indicadora parpadea en amarillo cada 0.2 segundos durante el funcionamiento. | El controlador del motor detecta alta temperatura. | Después de que la aeronave aterrice y se detenga, verifique si la temperatura de la carcasa del ESC es demasiado alta. Si la temperatura es alta, verifique si los tornillos de la posición de cableado del ESC están sueltos. |
Luces Indicadoras y Alertas Auditivas para el Controlador del Motor - Solución Rápida de Problemas
Cuando esté en uso, confíe en las luces indicadoras de estado y las alertas auditivas para evaluar si el producto está funcionando correctamente. Si ocurren anormalidades, solucione los problemas.
Fallo Durante la Auto-Prueba
| Síntomas de Fallo | Causas Posibles | Solución |
|---|---|---|
| Fallo en la auto-prueba al encender, el motor emite un sonido de “beep” cada 1.5 segundos, acompañado de una breve luz indicadora amarilla intermitente. | Pérdida o mala identificación de la señal PWM del acelerador. El rango PWM del acelerador es incorrecto. | Asegúrese de que el cable de señal del acelerador esté bien conectado. Verifique si hay algún daño en el cable de señal. |
| Fallo en la auto-prueba al encender, el motor emite un sonido de “beep” cada 0.5 segundos, acompañado de una breve luz indicadora amarilla intermitente. | Se detectó un acelerador alto durante el encendido, entrando en modo de protección. | Asegúrese de que el controlador del motor haya pasado la auto-verificación antes de aumentar el acelerador. |
| Fallo en la auto-prueba de encendido, el motor está en silencio y la luz indicadora parpadea una secuencia de cuatro intervalos cortos cada 1.5 segundos: “corto-corto-corto-largo” en amarillo. | Fallo en la auto-prueba de encendido, el circuito del motor puede estar desconectado. | Abra la tapa del controlador del motor y verifique si los tres cables del motor están bloqueados de manera segura. |
| Fallo en la auto-prueba de encendido, el motor está en silencio y la luz indicadora parpadea una secuencia de cuatro intervalos cortos cada 1.5 segundos: “intervalos cortos cada 1.5 segundos” en amarillo. | Fallo en la auto-prueba de encendido, voltaje de suministro anormal. | Verifique si el voltaje de la batería es normal; inspeccione la línea de suministro de energía para una conexión adecuada. |
| Fallo en la auto-prueba al encender, el motor está silencioso y la luz indicadora parpadea una secuencia de cuatro intervalos cortos cada 1.5 segundos con una luz amarilla: otros patrones de parpadeo. | Fallo en la auto-prueba al encender, se detectó una anomalía en el hardware del controlador del motor. | Grabe el patrón de parpadeo del LED en video. Contacte al servicio al cliente para un controlador de motor de reemplazo y realice más pruebas. |
Fallo Durante la Operación
| Síntomas de Fallo | Causas Posibles | Solución |
|---|---|---|
| Los motores no giran después de que la aeronave está desbloqueada; comienzan a girar solo después de aumentar el acelerador. | El controlador de vuelo o el controlador remoto emiten un estado de inactividad desbloqueado; el valor del acelerador es menor a 1100 microsegundos. | Configure el controlador de vuelo o el control remoto para que emita un valor de inactividad con un valor de acelerador superior a 1100 microsegundos; rango recomendado de 1160uS a 1180uS. |
| Después de encender la aeronave y conectar el control remoto, los motores comienzan a girar. | El control remoto está configurado para bloquear el acelerador en un valor superior a 1100 microsegundos o cerca de 1100 microsegundos. | El control remoto necesita ser configurado para bloquear el acelerador en un valor menor o igual a 1050 microsegundos. |
| La autoprueba al encender es normal, pero los motores no giran después de desbloquear. Luz indicadora: 0.5 segundos de luz amarilla seguido de 0.5 segundos apagada, y los motores no producen ningún sonido. | El inicio del motor falló, encontrando protección contra estancamiento durante el proceso de inicio. | Ciclo de energía (encender y apagar la energía). Si el problema persiste, verifique si el motor está dañado. |
| La auto-prueba de encendido es normal, pero los motores no giran después de desbloquear. Luz indicadora: 0.5 segundos de luz amarilla seguidos de 0.5 segundos apagada, y los motores no producen ningún sonido. | El controlador del motor detecta un estancamiento del motor y entra en modo de protección. | Verifique si el motor está estancado debido a un choque e inspeccione si la rotación del motor es suave. |
| La auto-prueba de encendido es normal, pero los motores no giran después de desbloquear. Luz indicadora: 1 segundo de luz amarilla seguido de 1 segundo apagada, y los motores no producen ningún sonido. | Se activó la protección contra cortocircuito o sobrecorriente, entrando en modo de protección. | Abra la tapa del controlador del motor e inspeccione si hay algún daño en los cables del motor y si las conexiones de cobre en los cables del motor están sueltas. |
| Durante la operación, la luz indicadora parpadea alternativamente en rojo y verde. | El controlador del motor detecta una pérdida de señal de aceleración PWM. | Aterriza de forma segura, verifica si la línea de señal PWM está bien conectada y revisa si hay algún daño en la línea de señal. |
| Durante la operación, la luz indicadora parpadea rápidamente en amarillo cada 0.2 segundos. | El controlador del motor detecta alta temperatura. | Después de aterrizar y detener la aeronave, verifica si la carcasa del controlador del motor está demasiado caliente. Si la temperatura es alta, inspecciona si los tornillos de los terminales del cable están sueltos. |
| Fallo en la auto-prueba de encendido, el motor está silencioso y la luz indicadora parpadea una secuencia de cuatro intervalos cortos cada 1.5 segundos: “corto”-“largo”-“corto”-“corto” en amarillo. | Fallo en la auto-prueba de encendido, voltaje anormal en los cables del motor. | Verifique si hay cortocircuitos entre los cables del motor y el bus principal en el controlador del motor. Inspeccione si los cables del motor están dañados y si hay un cortocircuito con la carcasa. |
Detalles

El conjunto de brazos de dron MAD 9x12 utiliza un módulo de propulsión integrado con un soporte de tubo de carbono de 30 mm y un motor etiquetado como M9C12 y un diseño de ESC de 60A 14S.

El motor de disco M9C12 se empareja con un regulador circular de 60A FOC utilizando el modo de conducción de onda sinusoidal para una entrega de energía más suave.

La configuración MAD presenta una hélice de fibra de carbono y una luz de dirección LED roja/verde incorporada para una orientación más clara.
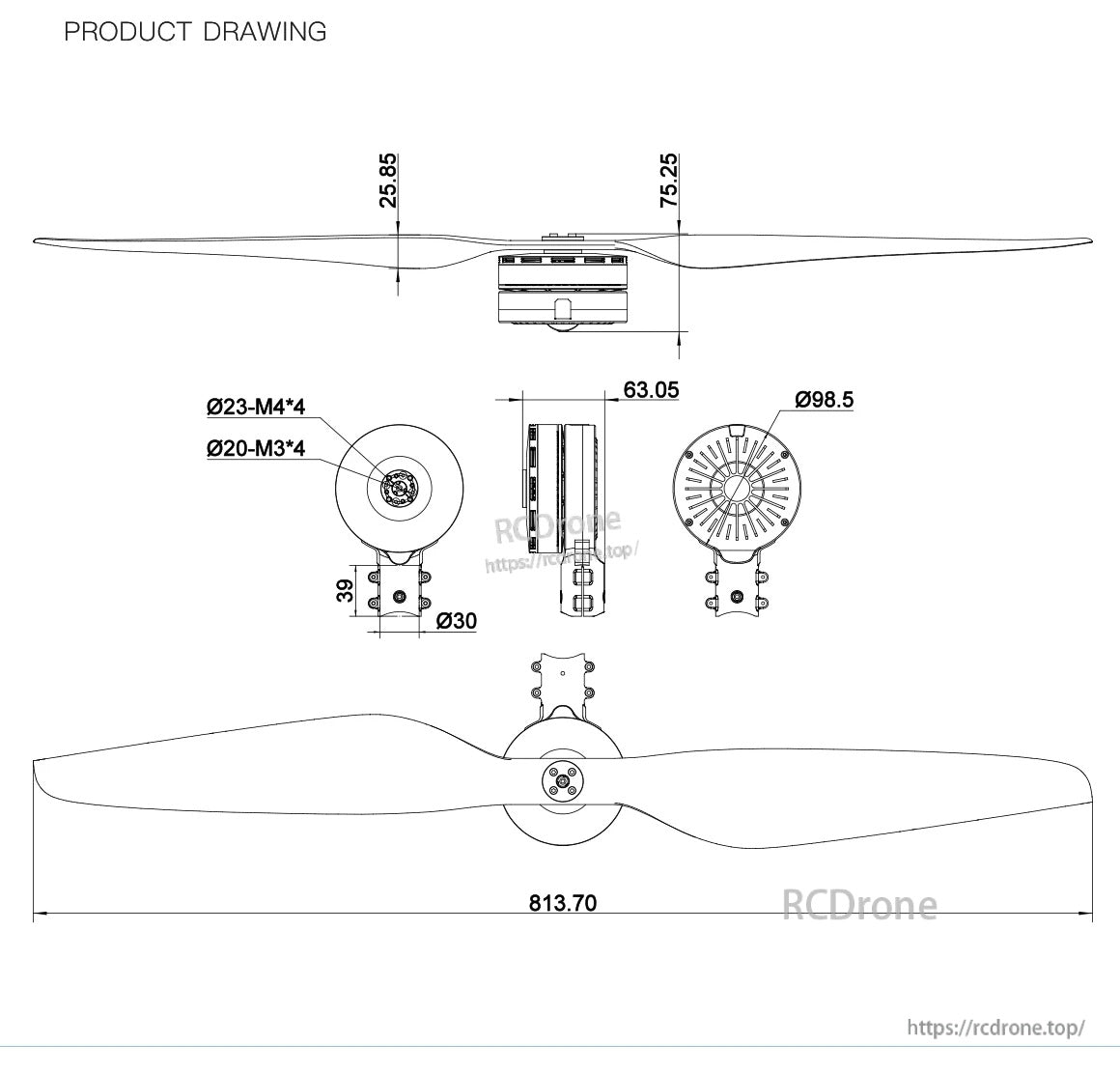
El dibujo de la hélice indica una envergadura total de 813.70 mm y muestra los patrones de orificio de montaje del cubo (Ø23 M4×4 y Ø20 M3×4) para verificaciones de ajuste.
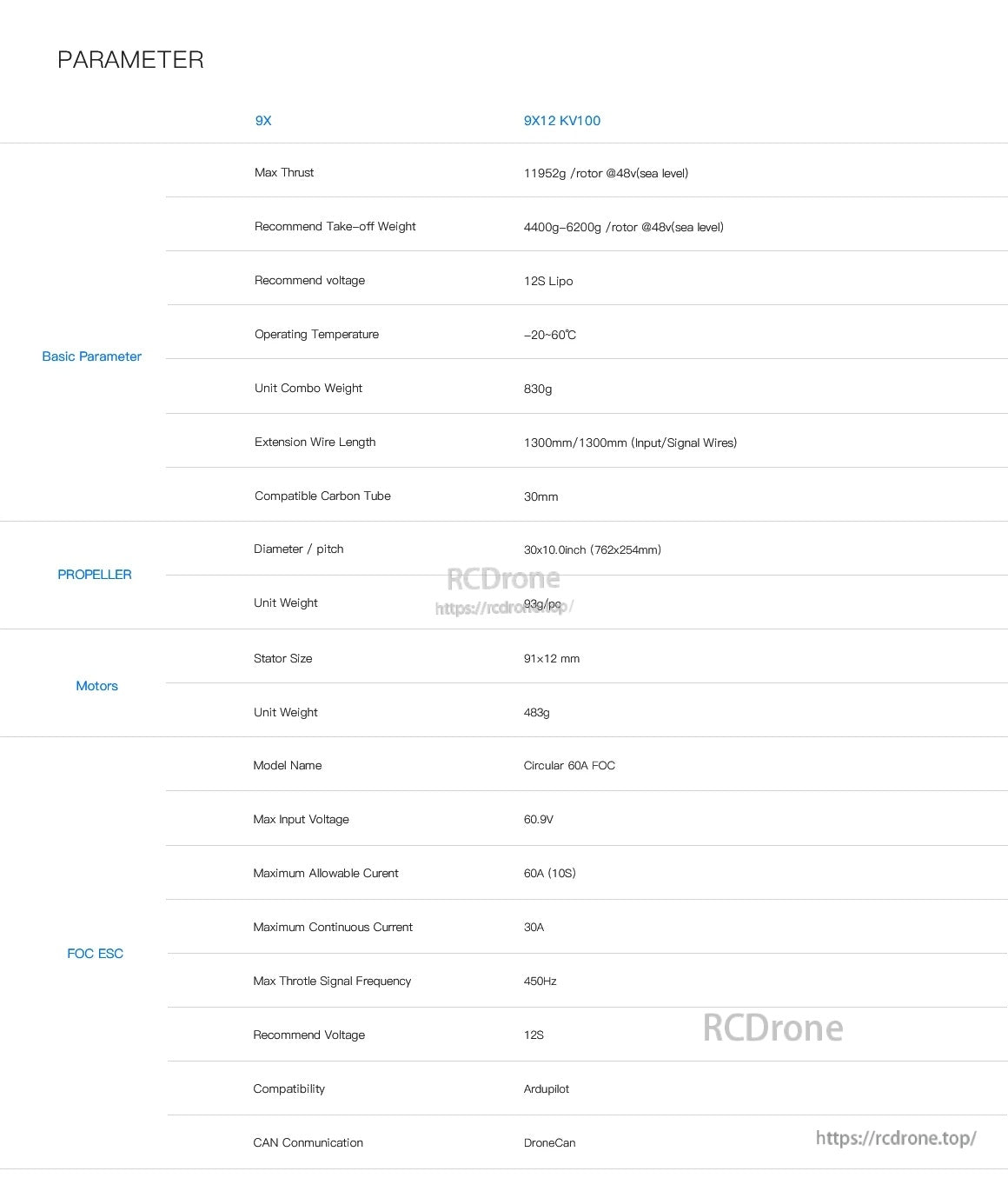
La hoja de parámetros 9X12 KV100 lista el soporte para 12S LiPo, 11,952g de empuje máximo por rotor a 48V (nivel del mar) y compatibilidad con tubos de carbono de 30 mm.
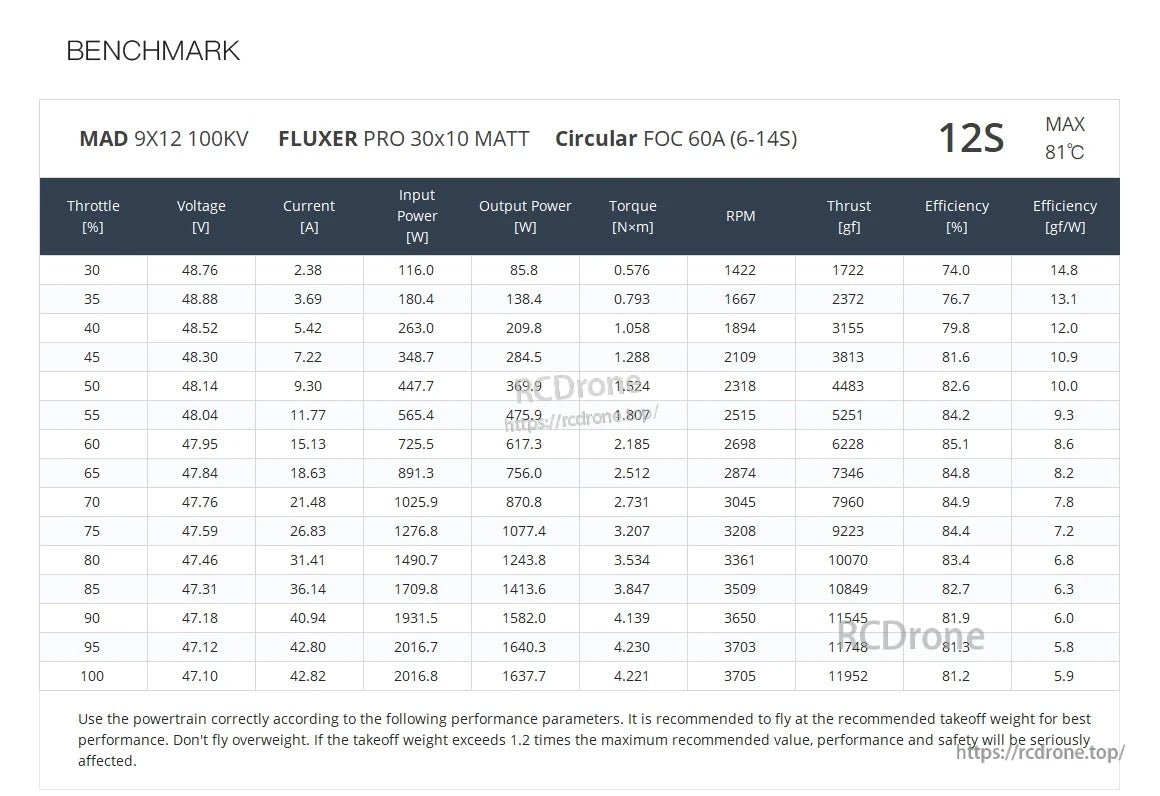
Los datos de referencia MAD 9x12 100KV 12S enumeran los pasos del acelerador con voltaje, corriente, RPM, empuje y eficiencia, con una temperatura máxima registrada de 81°C.

La guía de solución de problemas del ESC empareja patrones de indicadores LED y sonidos de beep con causas comunes y verificaciones de cableado para un diagnóstico más rápido.
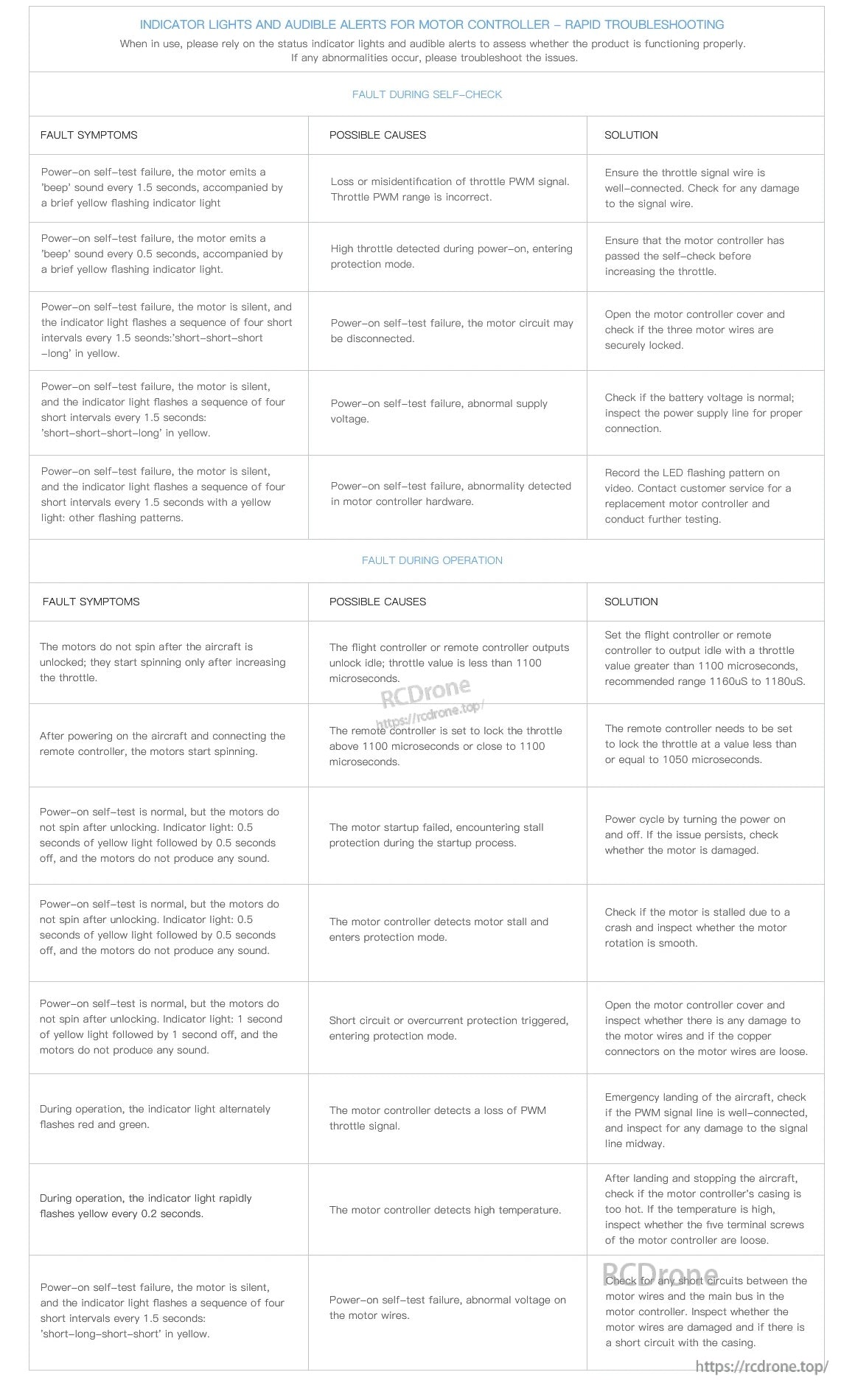
Los patrones de parpadeo del LED del controlador de motor y los beeps audibles proporcionan una guía rápida sobre fallas probables y verificaciones recomendadas.
Related Collections




