



Motor SteadyWin DD5015 24V 30rpm RS485/CAN Codificador Absoluto Monovuelta 14bit 173g
Motor SteadyWin DD5015 24V 30rpm RS485/CAN Codificador Absoluto Monovuelta 14bit 173g
SteadyWin
Precio habitual
$138.00 USD
Precio habitual
Precio de oferta
$138.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Resumen
El motor SteadyWin DD5015 es un motor compacto con comunicación RS485 / CAN y un encoder absoluto de una vuelta (14 bits). Está diseñado para casos de uso en robótica y automatización donde se requiere un output controlado de baja velocidad y retroalimentación.
Para soporte de integración y preguntas previas a la venta, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Tensión nominal | 24V |
| Rango de tensión | 10~28V |
| Corriente nominal | 1.2A |
| Potencia nominal | 28.8W |
| Par nominal | 0.48N.M |
| Velocidad nominal | 30rpm |
| Velocidad máxima sin carga | 526 rpm |
| Par máximo | 0.58 N.m |
| Corriente máxima | 1.63A |
| Constante de velocidad | 21.92 rpm/v |
| Constante de par | 0.33N.M/A |
| Número de pares de polos | 14Pares |
| Resistencia de fase | 4.9Ω |
| Inductancia de fase | 2.046Mh |
| Comunicación | RS485 / CAN |
| Tipo de codificador | Absoluto de una vuelta |
| Resolución | 14bit |
| Peso del motor | 173g |
| Temperatura de trabajo | -20~80°C |
Detalles mecánicos / de interfaz (del dibujo)
- Marcado del modelo: DD5015
- Diámetro del cuerpo: Ø49±0.1
- Diámetro de la tapa final: Ø42
- Patrón de montaje: 4-M3 profundidad 4.5 (mostrado en patrones Ø20 y Ø42)
- Longitudes de la llave: 34±0.1 longitud total; segmentos 13 y 20.5
- Características del centro: Ø5; Ø13.6 (+0.05/0); Ø12.6 (+0.1/0) con profundidad 16.7
- Conector: SH1.0-8PIN
- Etiquetas de pines: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Documentos
Detalles
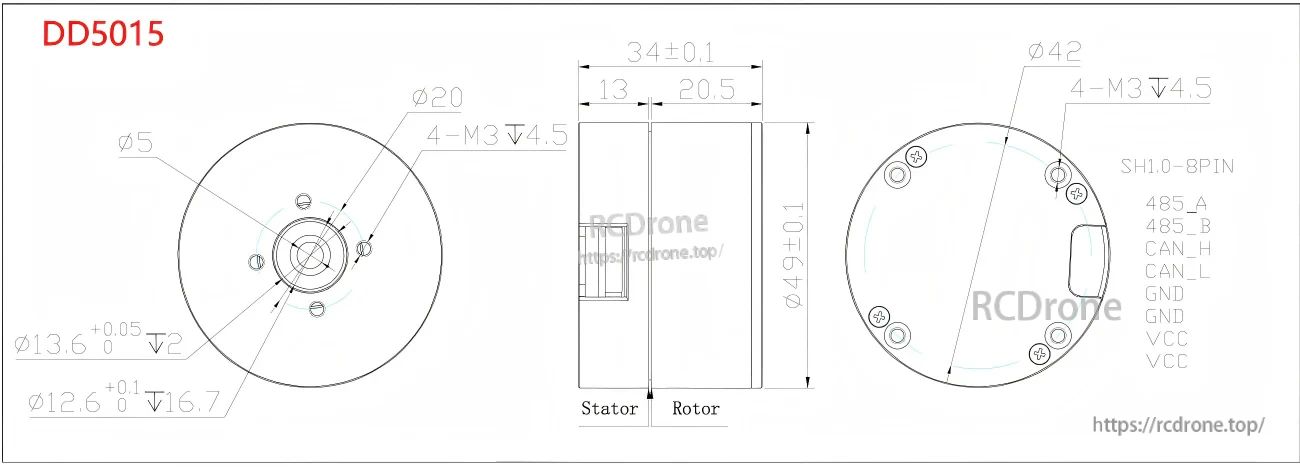
Las dimensiones de montaje y el pinout del conector de 8 pines SH1.0 para cableado RS485/CAN se proporcionan para la planificación de integración.
Related Collections



