




Motor SteadyWin GB6025 36V 504RPM 1.77N·m Opción de codificador AS5048A/AS5600 Compatible con anillo deslizante
Motor SteadyWin GB6025 36V 504RPM 1.77N·m Opción de codificador AS5048A/AS5600 Compatible con anillo deslizante
SteadyWin
No se pudo cargar la disponibilidad de retiro
Resumen
El motor SteadyWin GB6025 es un motor de 36V diseñado para aplicaciones de robótica y control de movimiento. Soporta codificadores de 12 bits y 14 bits y se especifica con opciones de codificadores AS5048A/AS5600.
Características Clave
- Compatible con codificadores de 12 bits y 14 bits
- Compatible con anillos deslizantes
- Estable a bajas velocidades; ampliamente utilizado en gimbals y pods
- Opciones de tipo de codificador: AS5048A / AS5600
Aplicaciones
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Modelo | GB6025 |
| Tensión Nominal | 36V |
| Par Nominal | 1.77 N·m |
| Velocidad nominal | 504 RPM |
| Velocidad máxima | 720 RPM |
| Corriente nominal | 7.4 A |
| Par de estancamiento | 2.68 N·m |
| Corriente de estancamiento | 10.67 A |
| Vueltas de bobinado del motor | 30T |
| Resistencia de fase | 3.5Ω |
| Inductancia de fase | 10.07Mh |
| Constante de velocidad | 20rpm/v |
| Constante de par | 0.23N.M/A |
| Inercia del rotor | 1645gcm^2 |
| Número de pares de polos | 14Pares |
| Peso del motor sin encoder | 478g |
| Peso del motor con encoder | 506g |
| Temperatura máxima de desmagnetización | 120℃ |
| Temperatura de trabajo | 20~80 ℃ |
| Tipo de encoder | AS5048A/AS5600 |
Notas de dibujo (con carcasa de encoder)
- Diámetro exterior: φ68±0.05
- Opciones de longitud del cuerpo mostradas: 48±0.2 y 42±0.2
- Dimensión de paso/sección mostrada: φ63
- Patrones de agujeros/diámetros mostrados: 8-M3; 3-M2; φ44; φ30; φ53.5; φ27.5; φ22.2; φ12.7; φ6
- Dimensiones adicionales mostradas: 14.1; 1.1
Manuales / Documentos
Para preguntas de preventa e integración (selección de codificadores, planificación de cableado y acceso a documentos), contacte con soporte en https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Detalles
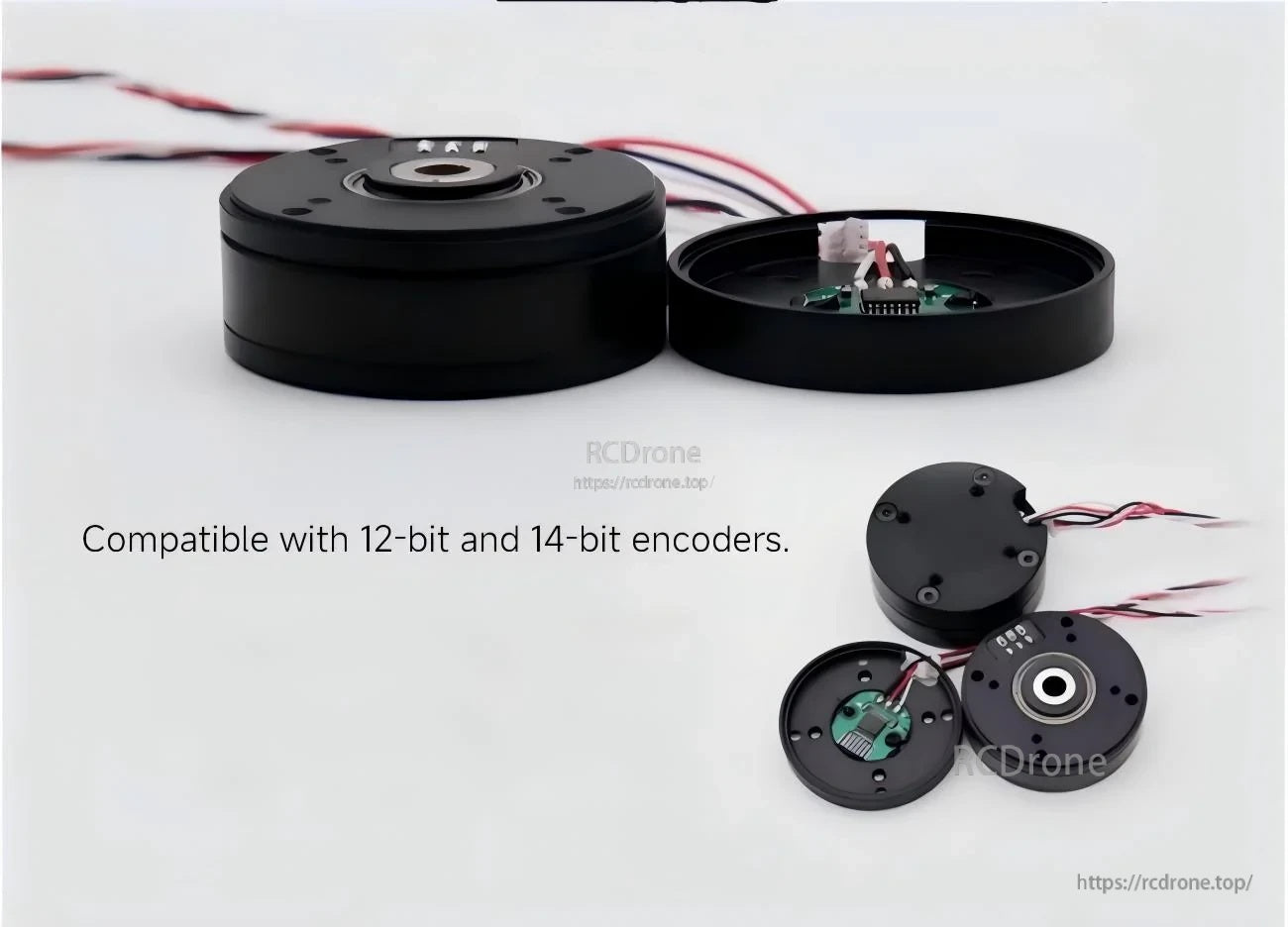
El ensamblaje del motor GB6025 listo para codificador admite opciones de retroalimentación de 12 bits y 14 bits, como AS5048A o AS5600.

La construcción compatible con anillos deslizantes y el rendimiento estable a baja velocidad son adecuados para gimbals, pods y otras construcciones de control de movimiento.
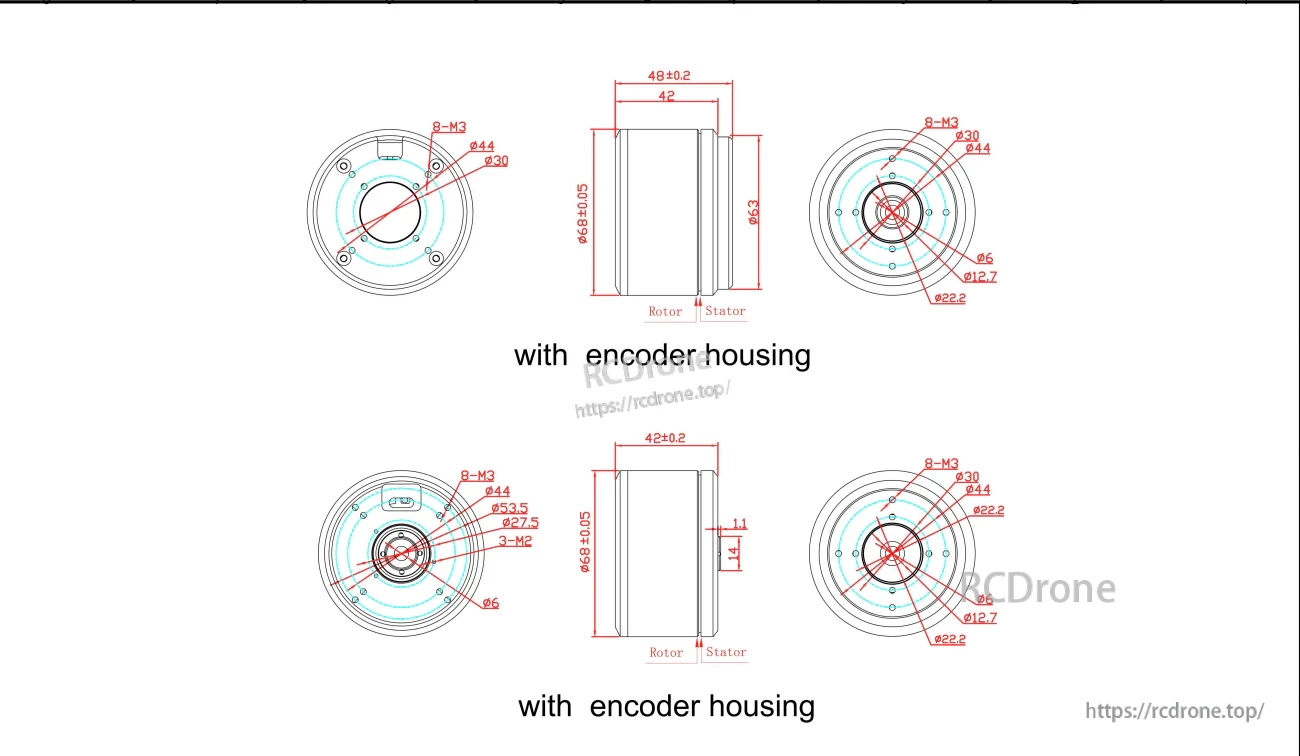
Utilice el dibujo mecánico para verificar la compatibilidad, la longitud del cuerpo y el espaciado de los agujeros de montaje antes de la integración.
Related Collections




