Motor reductor planetario SteadyWin GIM4305-10 — 48W, relación 10:1, par nominal 1 N·m, 300–366 RPM, CAN, IP54 para actuadores robóticos
Motor reductor planetario SteadyWin GIM4305-10 — 48W, relación 10:1, par nominal 1 N·m, 300–366 RPM, CAN, IP54 para actuadores robóticos
SteadyWin
No se pudo cargar la disponibilidad de retiro
Resumen
El motor reductor planetario SteadyWin GIM4305-10 es un motor reductor planetario compacto con un controlador SDC101 integrado y comunicación CAN. Diseñado para una actuación de precisión, la unidad opera a un voltaje nominal de 24V (rango de 12-36V), entrega 48W de potencia y proporciona un par nominal de 1 N·m (par de estancamiento 3.47 N·m) después de una reducción de 10:1. El GIM4305-10 tiene una clasificación IP54 y soporta un encoder de 14 bits y conexión de encoder separada; se encuentra disponible soporte de freno personalizado. Las protecciones integradas incluyen monitoreo de sobretemperatura, sobrevoltaje y sobrecarga.
Para servicio al cliente y soporte técnico, contacte: [email protected] o visite https://rcdrone.top/.
Características Clave
- Reductor de engranaje planetario, relación 10:1 para aumentar el par de salida y el control posicional.
- Controlador SDC101 integrado con comunicación CAN para control en red.
- Velocidad nominal después de la reducción 300 RPM, máxima 366 RPM.
- Codificador: integrado de 14 bits, soporta entrada de codificador separada.
- Sobre compacto Ø53×26mm y baja masa (140g sin controlador; 150g con controlador).
- Clasificaciones mecánicas: carga axial máxima 125N, carga radial máxima 500N, retroceso del engranaje 15 arcmin.
- Rango de temperatura de operación -20°C a +80°C y ruido acústico <60 dB.
- Material del engranaje reductor: ALU o ACERO. Soporte de freno personalizado disponible.
Especificaciones
| Modelo | GIM4305-10 |
| Modelo de controlador | SDC101 |
| Tensión nominal | 24V (rango de 12-36V) |
| Potencia | 48W |
| Par nominal (después de la reducción) | 1 N·m |
| Par de bloqueo | 3.47 N·m |
| Velocidad Nominal (después de la reducción) | 300 RPM |
| Velocidad Máxima (después de la reducción) | 366 RPM |
| Corriente Nominal | 2A |
| Corriente de Estancamiento | 5.6A |
| Resistencia de Fase | 1.15 Ω |
| Inductancia de Fase | 0.41 mH |
| Constante de Velocidad | 15.25 rpm/v |
| Constante de Par | 0.62 N·m/A |
| Número de pares de polos | 14 pares |
| Relación de engranaje | 10:1 |
| Tipo de engranaje | Planetario |
| Material del engranaje reductor | ALU o ACERO |
| Juego del engranaje reductor | 15 arcmin |
| Peso del motor (sin controlador) | 140 g |
| Peso del motor (con controlador) | 150 g |
| Tamaño (sin controlador) | Ø53×26 mm |
| Tamaño (con controlador) | Ø53×26 mm |
| Carga axial máxima | 125 N |
| Carga radial máxima | 500 N |
| Ruido | <60 dB |
| Comunicación | CAN |
| Segundo encoder | NO |
| Grado de Protección | IP54 |
| Temperatura de Funcionamiento | -20°C a +80°C |
| Resolución del Encoder | 14 Bit |
| Soporte de Encoder Separado | SÍ |
| Soporte de Freno Personalizado | SÍ |
Aplicaciones
- Robots humanoides y articulaciones robóticas
- Brazos robóticos y módulos de actuación
- Exoesqueletos y dispositivos de asistencia portátiles
- Robots cuadrúpedos y articulaciones de piernas
- Módulos de conducción AGV y robótica móvil
- Proyectos de robots de código abierto (e.g., Integración Pupper V3)
Manuales
- Diagrama de instalación GIM4305-10SHS (PDF)
- Diagrama esquemático de interfaz del motor GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Detalles
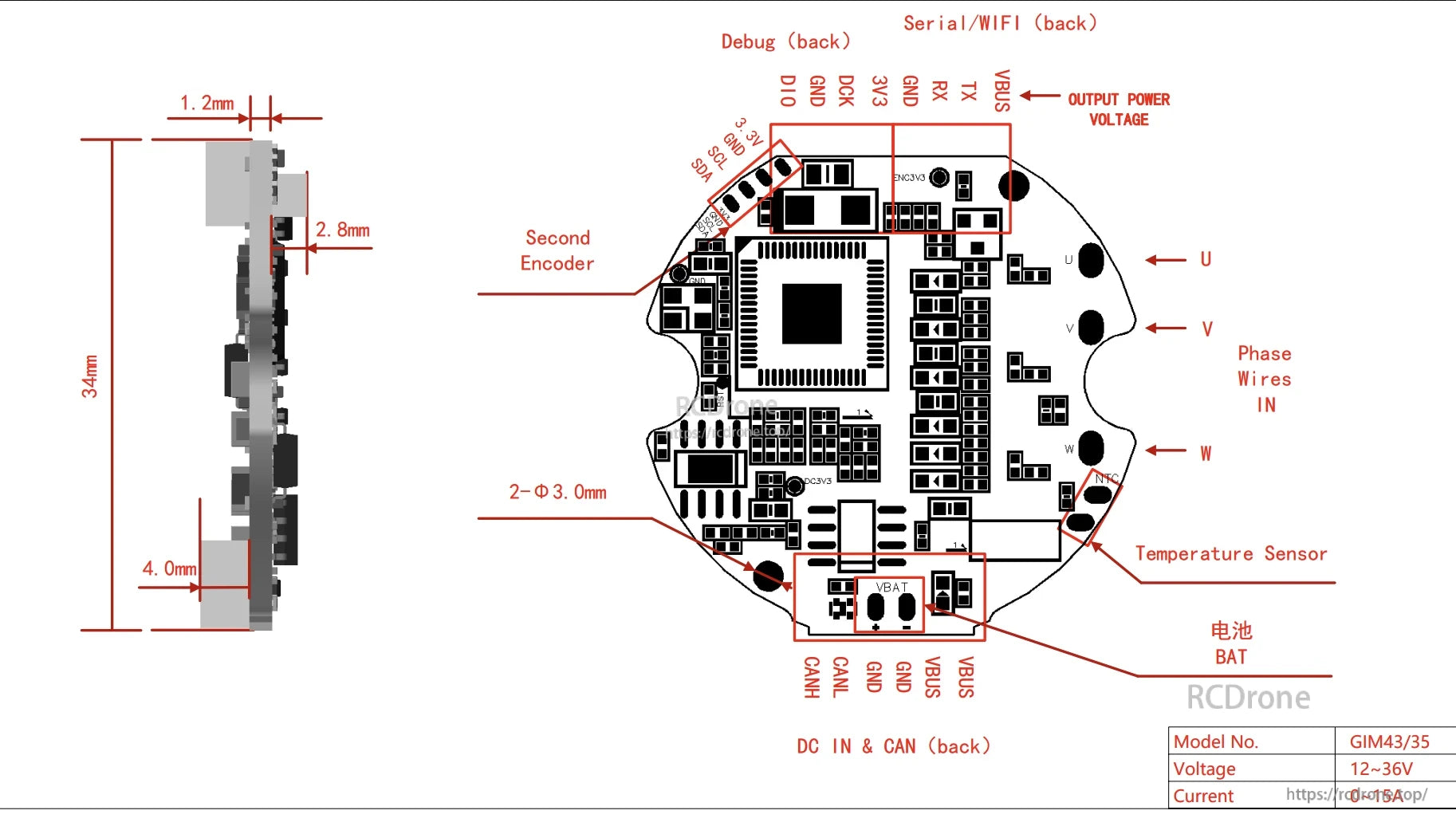
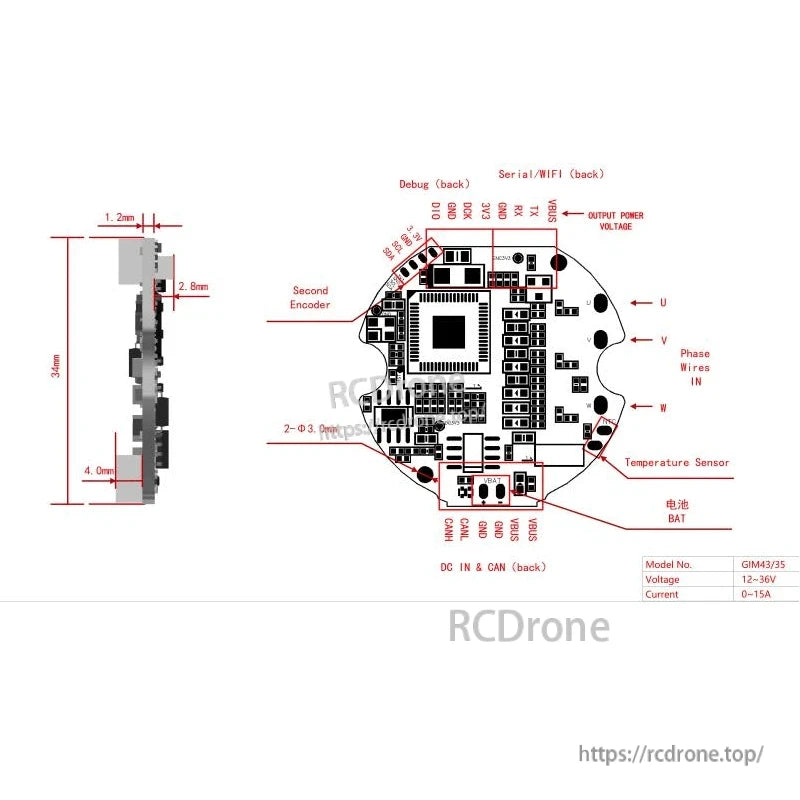
SteadyWin El diagrama de PCB del motor GIM43/35 muestra conexiones, dimensiones y componentes: codificadores, cables de fase, sensor de temperatura, entrada de batería, puertos de depuración—operando a 12–36V y 0–15A de corriente.
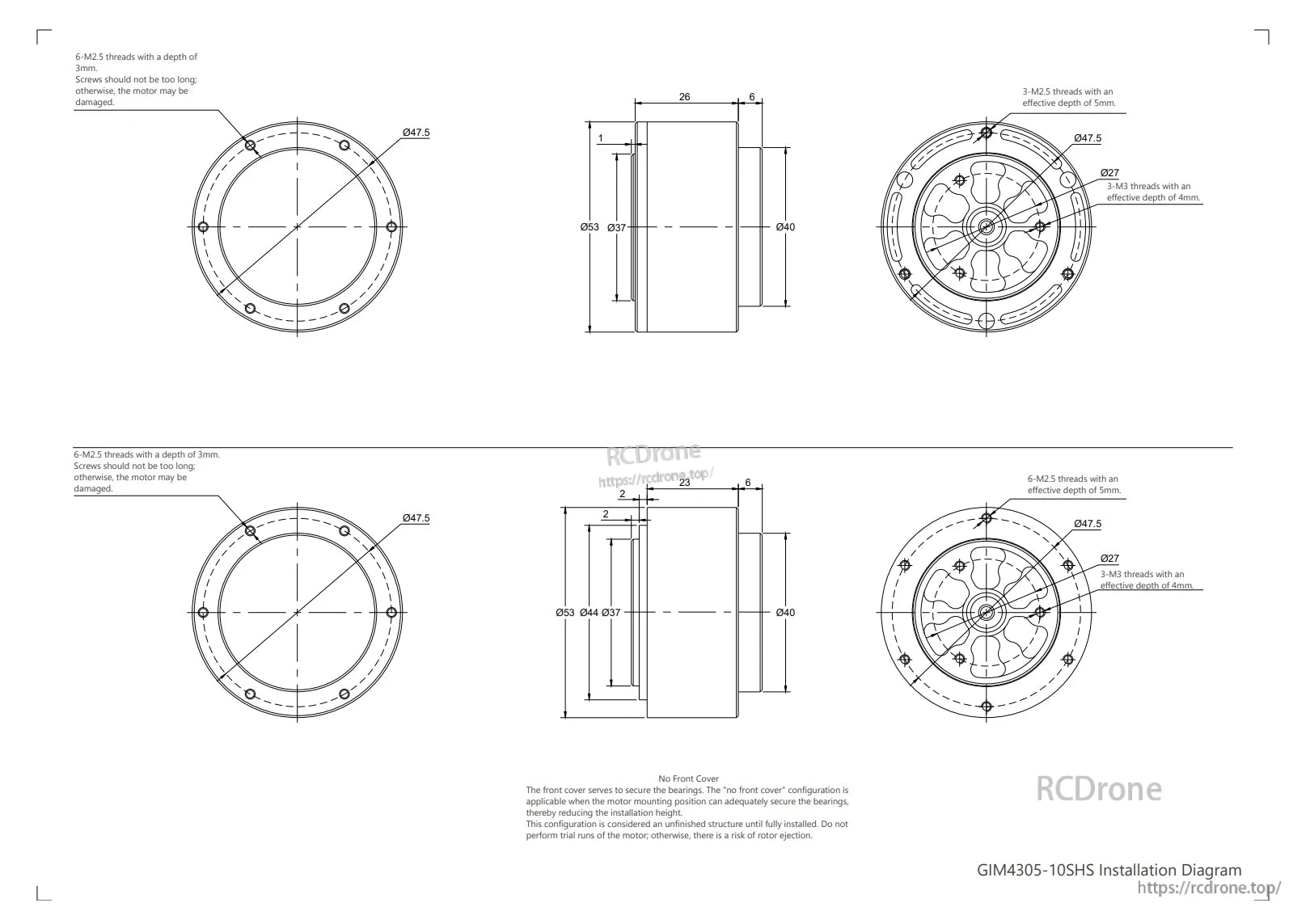
El diagrama técnico para la instalación del motor GIM4305-10SHS muestra dimensiones, especificaciones de rosca, advertencias sobre la longitud de los tornillos para prevenir daños y configuraciones con y sin cubierta frontal.