Drone de investigación SU17: desarrollo de drones industriales de código abierto PX4 con LiDAR MID-360, SLAM de cuatro cámaras y EGO-Swarm
Drone de investigación SU17: desarrollo de drones industriales de código abierto PX4 con LiDAR MID-360, SLAM de cuatro cámaras y EGO-Swarm
RCDrone
No se pudo cargar la disponibilidad de retiro
Descripción general
El dron de investigación SU17 es un cuadricóptero de alto rendimiento que cuenta con un Batería de 6000 mAh, LiDAR MID-360 para mapeo 3D, Sistema SLAM de cuatro cámaras para una localización precisa e integrada Posicionamiento GPS+GLONASSCon un peso de despegue de 2,3 kilos y un Capacidad de carga útil de 200 g, ofrece 21 minutos de tiempo de vuelo en modo de posicionamiento visual. Desarrollado con el software Prometheus, admite reconocimiento de objetivos, planificación de rutas y navegación autónoma, lo que lo convierte en un de calidad industrial Solución para la investigación y la innovación.
Parámetros de hardware
Aeronave
| Parámetro | Descripción |
|---|---|
| Tipo de aeronave | Cuadricóptero |
| Peso de despegue (aprox.) | 2,3 kg (con funda protectora y batería) |
| Distancia diagonal | 320 milímetros |
| Dimensiones | Longitud: 442 mm, Ancho: 388 mm, Altura: 174 mm (sin cubierta protectora) |
| Carga útil máxima | 200 gramos |
| Tiempo de vuelo estacionario | Aprox. 13 min (con el cursor al 100 %, no por debajo del 0 %), posicionamiento visual: 21 min |
| Precisión al volar | GPS: Vertical ±1,5 m, Horizontal ±2,0 m |
| SLAM LiDAR 3D: Vertical ±0,08 m, Horizontal ±0,08 m | |
| SLAM visual de 4 cámaras: Vertical ±0,05 m, Horizontal ±0,05 m | |
| Nivel de resistencia al viento | Nivel 4 |
| Temperatura de funcionamiento | -10°C a 40°C |
| Chip MCU principal | STM32H743 |
| Unidad de medida intramuscular (IMU) | ICM42688/BMI088 |
| Barómetro | MS5611 |
| Brújula | QMC5883L |
| Interfaz | USB tipo C |
Computadora de a bordo
| Parámetro | Descripción |
|---|---|
| Procesador | Intel Core i5-8365U |
| Capacidad de memoria | 8 GB |
| Frecuencia de memoria | LPDDR3@2133MHz |
| Almacenamiento | SSD NVMe de 256 GB |
| Puerto de red | Baidu Apollo Ethernet X2, 12V@3A poweFuente de alimentación r, compatible con IEEE 1588-2008 (PTP v2) |
| Puerto serial | Puerto serie TTL X2, 5 V/3.3V@500mA powesuministro r |
| USB | Tipo-C X2 (1x USB 2.0, 1x USB 3.0) |
| HDMI | HDMI 1.4 |
Batería de potencia
| Parámetro | Descripción |
|---|---|
| Modelo | SU17-L |
| Tipo de batería | Batería de polímero de litio de alta presión |
| Voltaje nominal | 26,4 V (máx.), 21 V (mín.) |
| Voltaje de almacenamiento | 22,8 V (típico) |
| Capacidad nominal | 6000 mAh |
| Peso | 680 gramos |
| Dimensiones | Largo: 85,2 mm, Ancho: 86.5 mm, Altura: 135 mm |
Control remoto
| Parámetro | Descripción |
|---|---|
| Modelo | QE-2 |
| Canales | 8 |
| Potencia de transmisión | 18 ~ 20 dBm |
| Peso | 294,1 gramos |
Cardán
| Parámetro | Descripción |
|---|---|
| Ángulo controlable | -90° ~ 30° (Eje de inclinación) |
| Protocolo de transmisión | RTSP (estándar) |
| Formato de codificación | H.264 |
| Resolución | 1080P a 25 fps |
| Campo de visión diagonal (D) | 120° |
| Campo de visión vertical (V) | 54° |
| Campo de visión horizontal (H) | 95° |
Transmisión de imágenes
| Parámetro | Descripción |
|---|---|
| Frecuencia de funcionamiento | 2,4 GHz |
| Potencia de transmisión | 18 dBm |
| Alcance de la comunicación | 3 km (sin interferencias, sin obstáculos) |
| Rango de imágenes | 1 km (interferencia mínima, sin obstáculos) |
| Ancho de banda máximo | 40 Mbps |
Cámara de profundidad cuádruple
| Parámetro | Descripción |
|---|---|
| Acelerador de visión | Unidad de procesamiento de video Intel Movidius Myriad X |
| Resolución máxima | 1296x816 |
| Velocidad máxima de cuadros | 1280x800 a 120 fps |
| Tipo de obturador | Obturador global |
| Formato de codificación | Flujo único de 8/10 bits |
| Campo de visión | Campo de visión diagonal de 150°, campo de visión horizontal de 127,4°, campo de visión vertical de 79,7° |
| Número de sensores | 4 (2 delanteros + 2 traseros) |
| Unidad de medida intramuscular (IMU) | IMC270 |
Sistema global de navegación por satélite (GNSS)
| Parámetro | Descripción |
|---|---|
| Precisión horizontal | 1,5 m CEP (con SBAS) |
| Precisión de velocidad | 0,05 m/s |
| Modo de funcionamiento | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Cargador
| Parámetro | Descripción |
|---|---|
| Modelo | LK150-2640500 |
| Voltaje de entrada de CA | 100 V ~ 240 V |
| Voltaje de entrada de CC | 26.4 V |
| Peso | 460 gramos |
| Corriente de carga | 5A |
LiDAR 3D
| Parámetro | Descripción |
|---|---|
| Modelo | MEDIO-360 |
| Longitud de onda del láser | 905 nm |
| Rango de medición | 40 m con 10 % de reflectividad |
| Campo de visión | Horizontal 360°, Vertical -7° ~ 52° |
| Rango mínimo | 0,1 m |
| Frecuencia de puntos | 10 Hz (típico) |
| Salida de punto | 200.000 puntos/s |
| Interfaz de datos | Ethernet 100BASE-TX |
| Sincronización de datos | IEEE 1588-2008 (PTP v2), GPS |
| IMU incorporada | ICM40609 |
| Voltaje de la fuente de alimentación | 7 ~ 27 V |
| Dimensiones | 65 mm (ancho) x 65 mm (profundidad) x 60 mm (alto) |
| Peso | 115 gramos |
| Temperatura de funcionamiento | -20°C ~ 55°C |
Parámetros del software
Computadora de a bordo
| Parámetro | Descripción |
|---|---|
| Modelo | Intel Core i5-8365U |
| Sistema | Ubuntu 20.04 |
| Nombre de usuario | amov |
| Contraseña | amov |
| ROS | noético |
| OpenCV | 4.7.0 |
| Sistema de posicionamiento visual | BSA_SLAM versión 1 |
Software Prometeo
| Parámetro | Descripción |
|---|---|
| Versión | versión 2.0 |
| Sistema de estación terrestre Prometheus | v1.24.11.27 (Versión final basada en el registro de lanzamiento de Wiki) |
Detalles
Edición de investigación SU17
Drone de investigación de calidad industrial
- LiDAR 3D opcional:Permite mapear, posicionar y evitar obstáculos en la navegación.
- Software para drones autónomos Prometheus:Rico en demostraciones para dominar rápidamente el control de drones.
- Plataforma de vuelo de nivel industrial:Estable y abierto, establece un nuevo estándar para el rendimiento de los drones de investigación.

Características principales
La investigación del SU17 Plataforma de desarrollo de drones (conocido como SU17) adopta un diseño integrado que incorpora controladores de vuelo, computadoras de a bordo, módulos SLAM de cuatro cámaras, cámaras en la nube y módulos de transmisión de imágenes para una integración de alto nivel, lo que mejora significativamente la estabilidad y confiabilidad del hardware. Equipado con el software de drones autónomos Prometheus, el SU17 admite funciones como reconocimiento de objetivos, seguimiento y planificación de rutas para varios escenarios de control de vuelo.
Opcionalmente, integra el LiDAR 3D MID-360, combinado con el algoritmo FAST-LIO para lograr el LiDAR 3D SLAM, que ofrece información precisa de detección y posicionamiento del entorno. En combinación con el algoritmo de planificación de rutas EGO-Swarm, permite un mapeo 3D eficiente en tiempo real y la evitación de obstáculos en entornos complejos.




Sistema de software Prometheus V2
La plataforma de desarrollo se basa en el marco de código abierto ROS y Prometheus, que ofrece funcionalidades avanzadas y API de desarrollo secundario extensas para una reprogramación eficiente. Proporciona acceso a información de posicionamiento, modos de vuelo, estado de la batería, datos de la IMU y otras interfaces de datos de sensores y estado del dron, junto con interfaces de control para posición, velocidad, aceleración y actitud.
Además, incluye ejemplos de uso de las API relacionadas. Además, el dron cuenta con funciones de comprobación de seguridad para las operaciones de vuelo (antichoque), lo que permite el descenso automático en condiciones anormales, lo que reduce el riesgo de colisiones y garantiza un proceso de desarrollo más seguro.

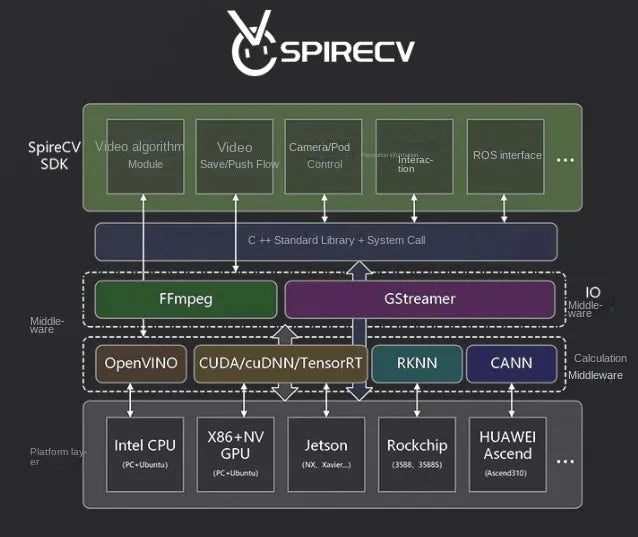
Biblioteca de visión SpireCV
La biblioteca de visión SpireCV es un kit de desarrollo de software (SDK) de procesamiento de imágenes en tiempo real diseñado específicamente para sistemas UAV inteligentes. Ofrece funciones como control de cámara y estabilizador, almacenamiento y transmisión de video, detección, reconocimiento y seguimiento de objetivos.
Este SDK tiene como objetivo ofrecer un alto rendimiento, confiabilidad y una interfaz optimizada para los desarrolladores de sistemas UAV inteligentes. Con una solución de procesamiento visual rica en funciones, permite a los desarrolladores implementar de manera eficiente varias aplicaciones complejas basadas en visión.
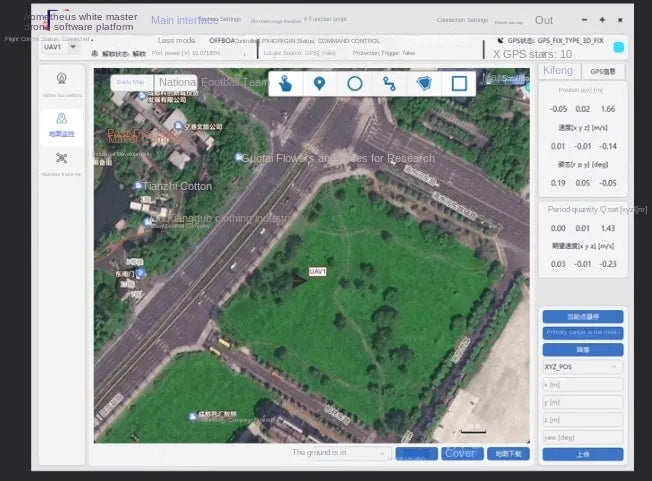
Estación terrestre Prometeo
La estación terrestre Prometheus es una interfaz de interacción entre humanos y drones desarrollada con base en el sistema Prometheus y construida con tecnología Qt. Permite replicar rápidamente las funcionalidades del sistema Prometheus, brindando monitoreo en tiempo real y visualización 3D del estado del dron y datos de control.
A través de la estación terrestre, los usuarios pueden ejecutar comandos como despegar con un solo clic, permanecer en la posición actual, aterrizar y controlar la posición. Además, el sistema admite botones de función personalizados para iniciar secuencias de comandos definidas por el usuario o enviar mensajes personalizados, lo que mejora significativamente la comodidad, la eficiencia y la escalabilidad de las operaciones del usuario.
Expansión poderosa
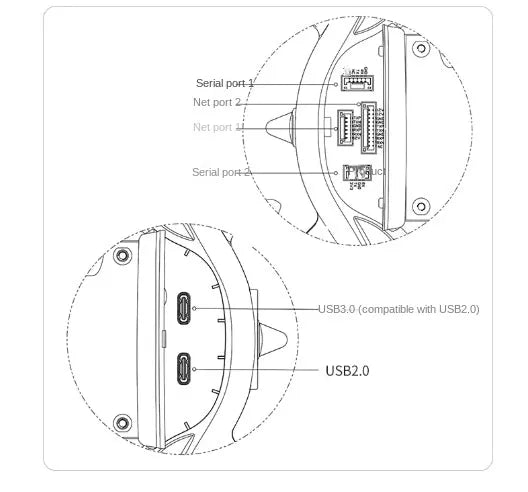
Puertos de expansión de hardware
-
Puerto serie 1
-
Puerto serie 2
-
Puerto de red 1
-
Puerto de red 2
-
Puertos USB:
- USB 3.0 (compatible con USB 2.0)
- USB 2.0
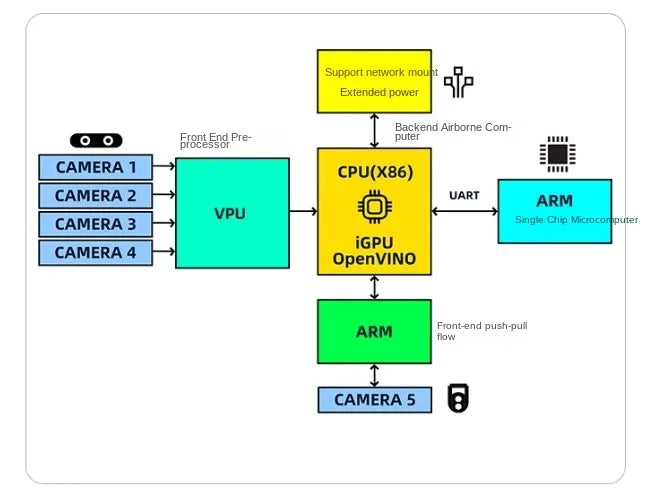
Marco de hardware
La imagen ilustra la arquitectura de hardware del dron SU17, destacando la integración de varios componentes para el procesamiento avanzado de datos y el control del sistema:
-
Cámaras (Cámara 1-4):
Conectado a un VPU (Unidad de procesamiento de visión) para preprocesamiento front-end. -
Unidad de procesamiento visual:
Maneja datos visuales de múltiples cámaras y los envía a las unidades de procesamiento. -
Procesador (X86) con iGPU y OpenVINO:
Actúa como unidad computacional principal para el procesamiento backend, respaldando capacidades de expansión conectadas a la red para una mayor potencia computacional. -
Microcontrolador ARM de un solo chip:
Interactúa con la CPU a través de una interfaz UART para funcionalidades de control adicionales. -
Pipelining de front-end y cámara 5:
Administrado por un procesador ARM dedicado para una mayor optimización de los datos.
Este marco integra múltiples unidades de procesamiento, lo que permite el análisis de imágenes en tiempo real, tareas computacionales avanzadas y una comunicación fluida entre componentes de hardware. Garantiza el manejo eficiente de operaciones complejas en aplicaciones de investigación y desarrollo.
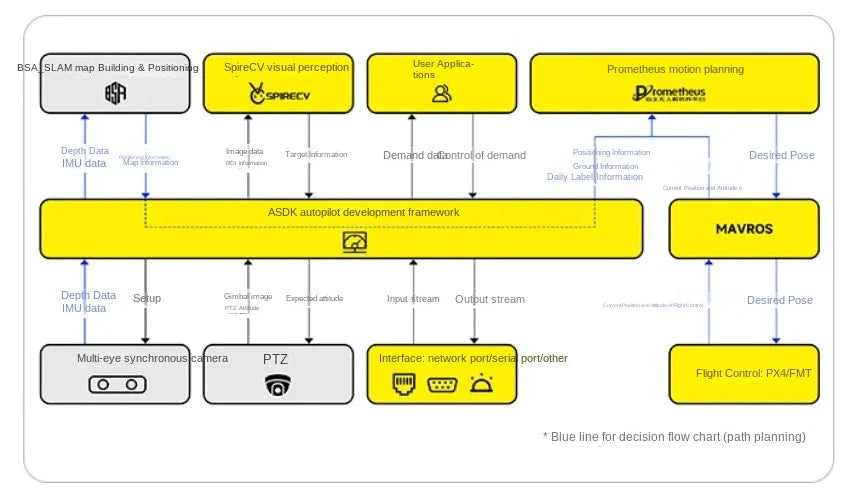
Marco de software
El diagrama ilustra la arquitectura de software del dron SU17, destacando la integración de varios sistemas para la funcionalidad autónoma:
-
BSA_SLAM (Mapeo y localización):
- Proporciona datos de posicionamiento y mapeo espacial.
- Integra entradas de sensores de profundidad e IMU para una percepción precisa del entorno.
-
Visión Percepción SpireCV:
- Procesa datos visuales, incluida la detección de objetos, información ROI y seguimiento de objetivos.
-
Aplicaciones de usuario:
- Interfaces para tareas controladas por el usuario, como visualización de datos e entrada de comandos.
-
Planificación de movimiento Prometeo:
- Maneja la planificación de la trayectoria utilizando datos de posición, velocidad y objetivo.
-
Marco de trabajo de conducción autónoma ASDK:
- Actúa como capa de procesamiento central y gestiona el flujo de datos entre sensores, cámaras, módulos de nube e interfaces externas.
- Admite múltiples canales de entrada/salida (por ejemplo, puertos de red, puertos serie).
-
MAVROS:
- Se comunica con los sistemas de control de vuelo (PX4/FMT) para controlar el estado del vuelo y la posición.
-
Módulo de nube y cámaras multisincronizadas:
- Integra datos basados en la nube para un procesamiento avanzado.
- Sincroniza entradas visuales para operaciones de alta precisión.
Líneas azules:Representan vías de toma de decisiones para la planificación de trayectorias.
Esta arquitectura demuestra un diseño modular y extensible, que permite una comunicación perfecta entre varios componentes de hardware y software para una operación robusta del dron.
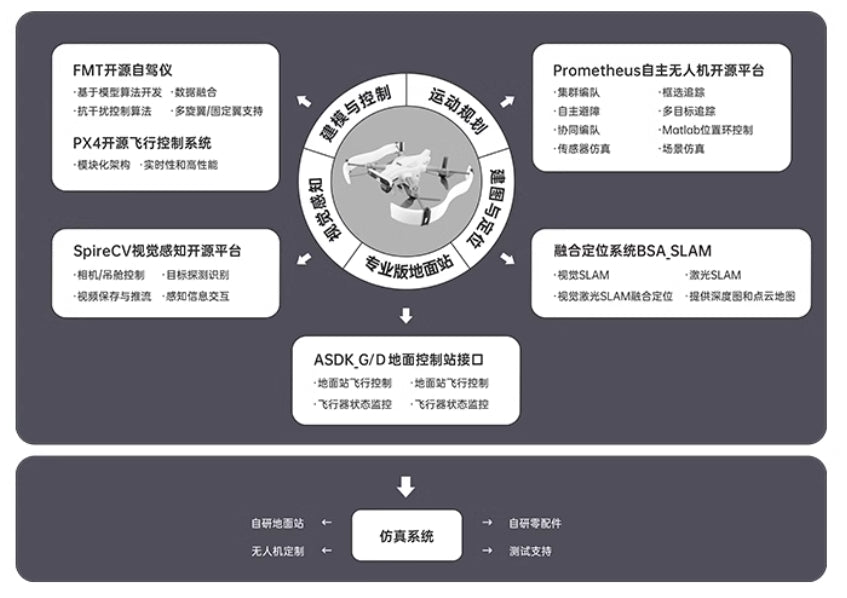
Apertura inteligente: solución de sistema UAV integrado
El diagrama presenta una arquitectura integral y abierta para sistemas de drones, enfatizando la modularidad y la integración entre varios componentes:
-
Componentes principales:
- Piloto automático de código abierto FMT:Proporciona un control de vuelo confiable basado en el desarrollo modular, que admite diversos entornos e integración de datos.
- Sistema de control de vuelo PX4:Garantiza la estabilidad y admite una personalización modular avanzada.
- Plataforma de percepción de la visión SpireCV:Se centra en el procesamiento de imágenes, incluida la detección de objetos, el seguimiento y la transmisión de vídeo en tiempo real.
-
Marcos clave:
- Plataforma de vehículos aéreos no tripulados autónomos Prometheus:Incluye control de múltiples drones, planificación de movimiento, navegación colaborativa y simulaciones del mundo real.
- Sistema BSA_SLAM:Combina SLAM basado en visión y SLAM basado en LiDAR para un posicionamiento y mapeo precisos.
- Interfaz de control de estación terrestre ASDK G/D:Permite una comunicación fluida entre estaciones terrestres y vehículos aéreos no tripulados para realizar monitoreo y ajustes en tiempo real.
-
Integración del flujo de trabajo:
- Destaca procesos como la planificación del movimiento, el mapeo del entorno y la navegación autónoma.
- Integración con estaciones terrestres profesionales para control de trayectoria, evitación de obstáculos y gestión de datos en tiempo real.
-
Soporte de simulación:
- Incluye un sistema de simulación para pruebas de misiones autónomas, control de UAV y validación de componentes.
Este sistema demuestra una solución de vanguardia para el desarrollo de vehículos aéreos no tripulados autónomos, con capacidades escalables para investigación, aplicación y pruebas en diversos escenarios.
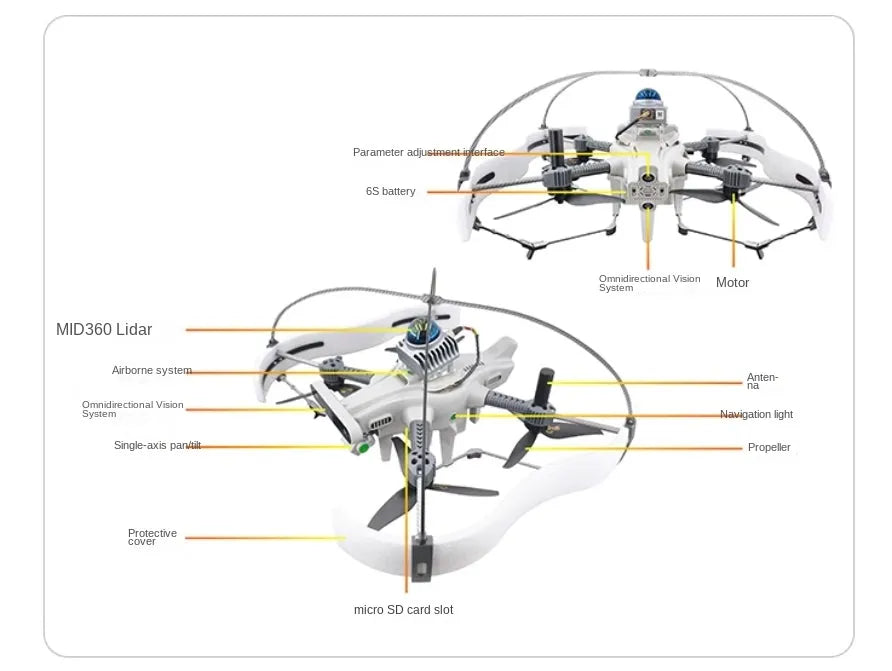
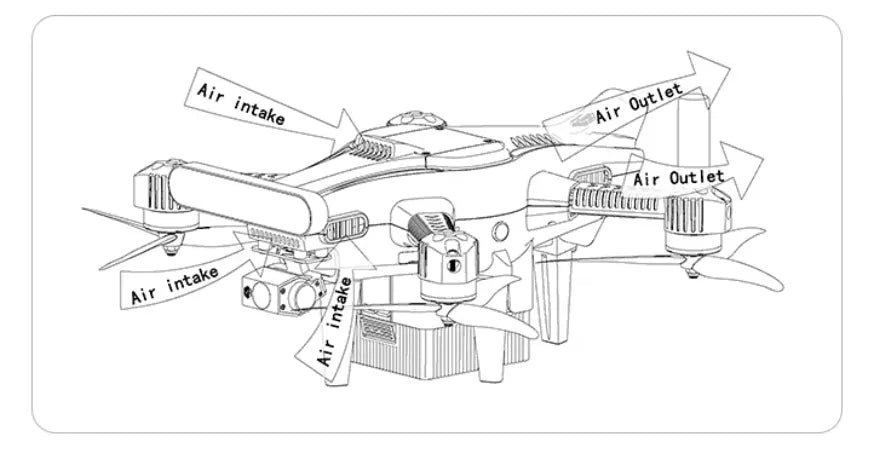
Los componentes estructurales del dron de investigación SU17 destacan su estabilidad y diseño avanzado. Las características principales incluyen: LiDAR MID360 Para un mapeo preciso, un sistema de visión omnidireccional Para una percepción ambiental integral, una cardán de un solo eje para imágenes estabilizadas y una robusta Batería 6S para una mayor potencia. Otros componentes esenciales incluyen el sistema de hélice, antena, luces de navegación, y un ranura para tarjeta micro SD Para el almacenamiento de datos. El diseño integra hardware de última generación, lo que garantiza confiabilidad y alto rendimiento para diversas aplicaciones de investigación.
Related Collections