Articulación de robot integrada Ti5 CRA-RI50-70-PRO-XX: engranaje armónico, eje hueco, 24–48 V, 150 W, codificador de 17 bits, CAN/EtherCAT
Articulación de robot integrada Ti5 CRA-RI50-70-PRO-XX: engranaje armónico, eje hueco, 24–48 V, 150 W, codificador de 17 bits, CAN/EtherCAT
Ti5 Robot
No se pudo cargar la disponibilidad de retiro
Descripción general
El robot Ti5 CRA-RI50-70-PRO-XX es una articulación robótica integrada de eje hueco compacta que combina una reductor armónico de precisión, motor de par sin marco, Unidad FOC, y codificador absoluto en un solo módulo. Con un 80 mm de diámetro exterior, Orificio pasante de 10 mm, 150 W de potencia, y 24–48 V suministro, entrega hasta Pico de 34 N·m (dependiente de la proporción) con reacción casi nula y bajo nivel de ruidoLa comunicación es seleccionable entre PODER y EtherCAT; codificadores simples o duales y un freno electromagnético La variante (-B) está disponible. Esta articulación está diseñada para cobots, manipuladores móviles, estabilizadores de giro e inclinación, equipos industriales, robots de inspección de potencia y plataformas marinas.
Características principales
-
Articulación todo en uno: reductor armónico + motor de par BLDC + driver FOC + codificador absoluto en cuerpo compacto sellado.
-
Eje hueco:Paso central de 10 mm para cables/líneas de aire.
-
Retroalimentación de alta precisión: codificador absoluto de 17 bits, memoria multivuelta de apagado; codificador simple/doble opciones.
-
Salida de juego bajo:etapa armónica con ~10–20 segundos de arco juego (por proporción).
-
Tranquilo &lificador; suave:Motor de torque de gran número de polos para estabilidad a baja velocidad y bajo ruido acústico.
-
Opciones de interfaz: PODER o EtherCAT autobús; opcional freno de mantenimiento (sufijo del modelo -B).
-
Personalizable:versiones impermeabilizantes/de baja temperatura disponibles de fábrica.
Modelos &Opciones de amplificador
-
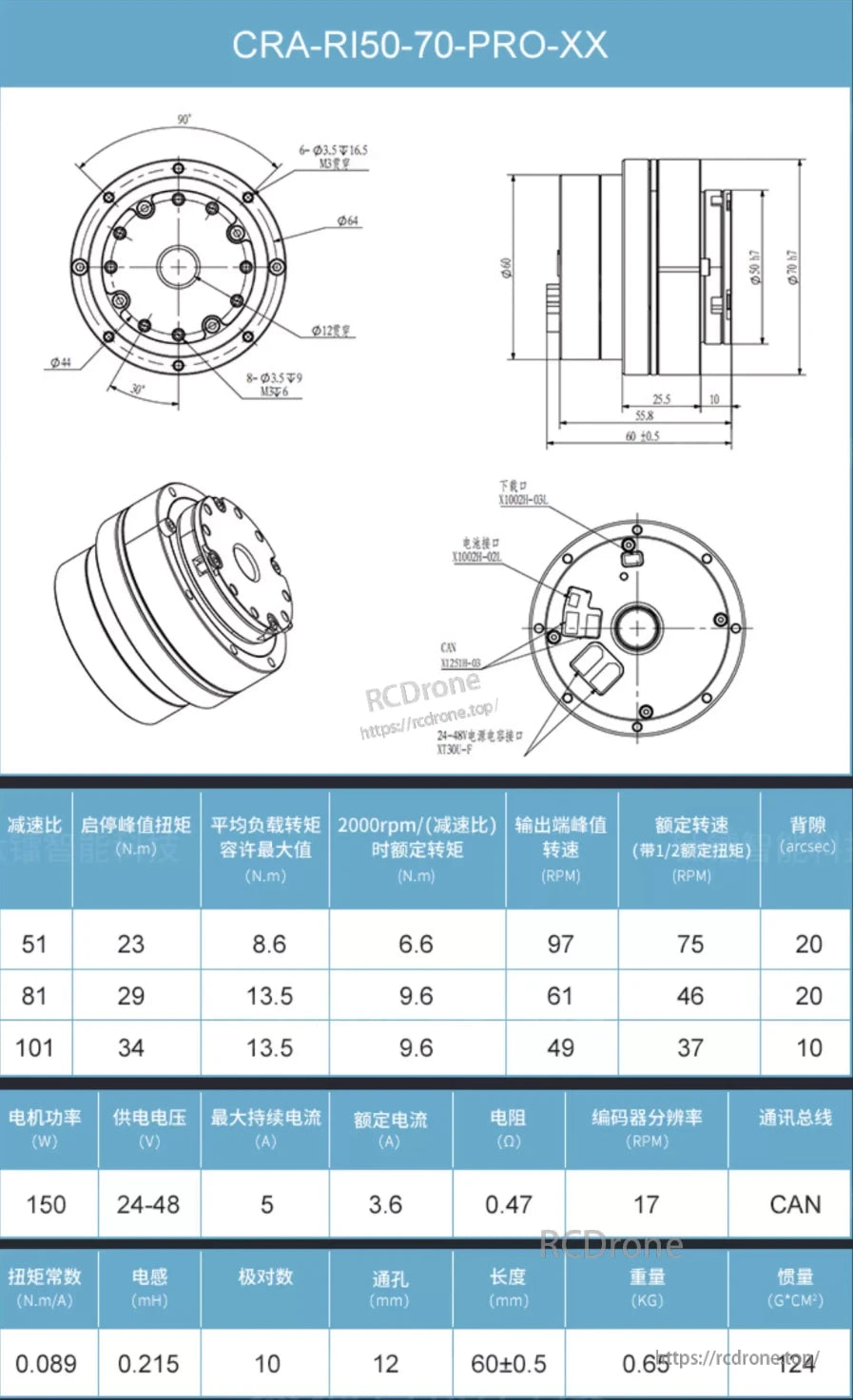
CRA-RI50-70-PRO-XX - estándar, sin freno (≈ 60 ± 0,5 mm longitud, ≈0,65 kilogramos, inercia ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — con freno (longitud ≈81,7 ± 0,5 mm)
-
Autobús: PODER o EtherCAT
-
Codificador: Soltero o Dual codificador
Rendimiento clasificado por relación de transmisión
| Relación de transmisión | Par máximo de arranque/parada (N·m) | Par de carga promedio máximo (N·m) | Par nominal a 2000 rpm/relación (Nuevo Méjico) | Velocidad máxima de salida (rpm) | Velocidad nominal a ½ rpm | Juego (arco-segundos) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13.5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13.5 | 9.6 | 49 | 37 | 10 |
Notas: Los valores de velocidad y par de salida corresponden a la salida del reductor. La especificación de menor holgura se aplica a la variante 101:1.
Eléctrico &Datos del motor y del amplificador
-
Fuerza: 150 vatios
-
Tensión de alimentación: 24–48 VCC
-
Corriente continua máxima: 5 A | Corriente nominal: 3,6 A | Resistencia de fase: 0.47 Ω
-
Constante de par: 0,089 N·m/A | Inductancia: 0,215 mH | Pares de polos: 10
-
Resolución del codificador: absoluto de 17 bits (memoria de apagado)
-
Control orientado al campo (FOC) integrado
Interfaz mecánica
-
Diámetro exterior: Ø80 mm
-
Círculo de pernos: Ø64 mm (brida delantera)
-
Agujero pasante: Ø10 mm
-
Longitud total: 60 ± 0,5 mm (estándar) / 81,7 ± 0,5 mm (-B con freno)
-
Masa:~0,65 kilogramos (estándar)
-
Inercia (rotor):~124 g·cm² (estándar)
-
La cara frontal proporciona múltiples sujetadores M3; patrón de orificios detallado según el dibujo mecánico.
Conectividad
-
Autobús: PODER o EtherCAT
-
Variantes: Codificador único / Codificador dual
-
Opción de freno: -B Los modelos incluyen un freno de retención integrado.
Aplicaciones típicas
-
Brazos robóticos colaborativos y de escritorio, robots de servicio
-
Gimbals y sistemas de cámara con movimiento panorámico e inclinación
-
Vehículos terrestres no tripulados (UGV) móviles de manipulación e inspección de potencia
-
Módulos de automatización industrial y equipos marinos
Qué está incluido
-
Junta integrada CRA-RI50-70-PRO-XX (relación seleccionada) &opciones de amplificador)
-
Conectores de acoplamiento & tornillos básicos (por kit)
-
Dibujo mecánico &Pinout del amplificador (digital)
Código de pedido (ejemplo)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: relación de transmisión (51/81/101)
-
B: con freno (en blanco = sin freno)
-
T/2E: opciones de codificador simple/doble
-
IPXX: clasificación de impermeabilidad opcional (a pedido)
Detalles

Especificaciones de la articulación robótica CRA-RI50-70-PRO-XX: motor de 150 W, 24-48 V, bus CAN, relaciones de transmisión 51-101, par máximo de hasta 34 N.m, longitud de 60 ± 0,5 mm, peso de 0,65 kg, inercia de 124 g·cm².
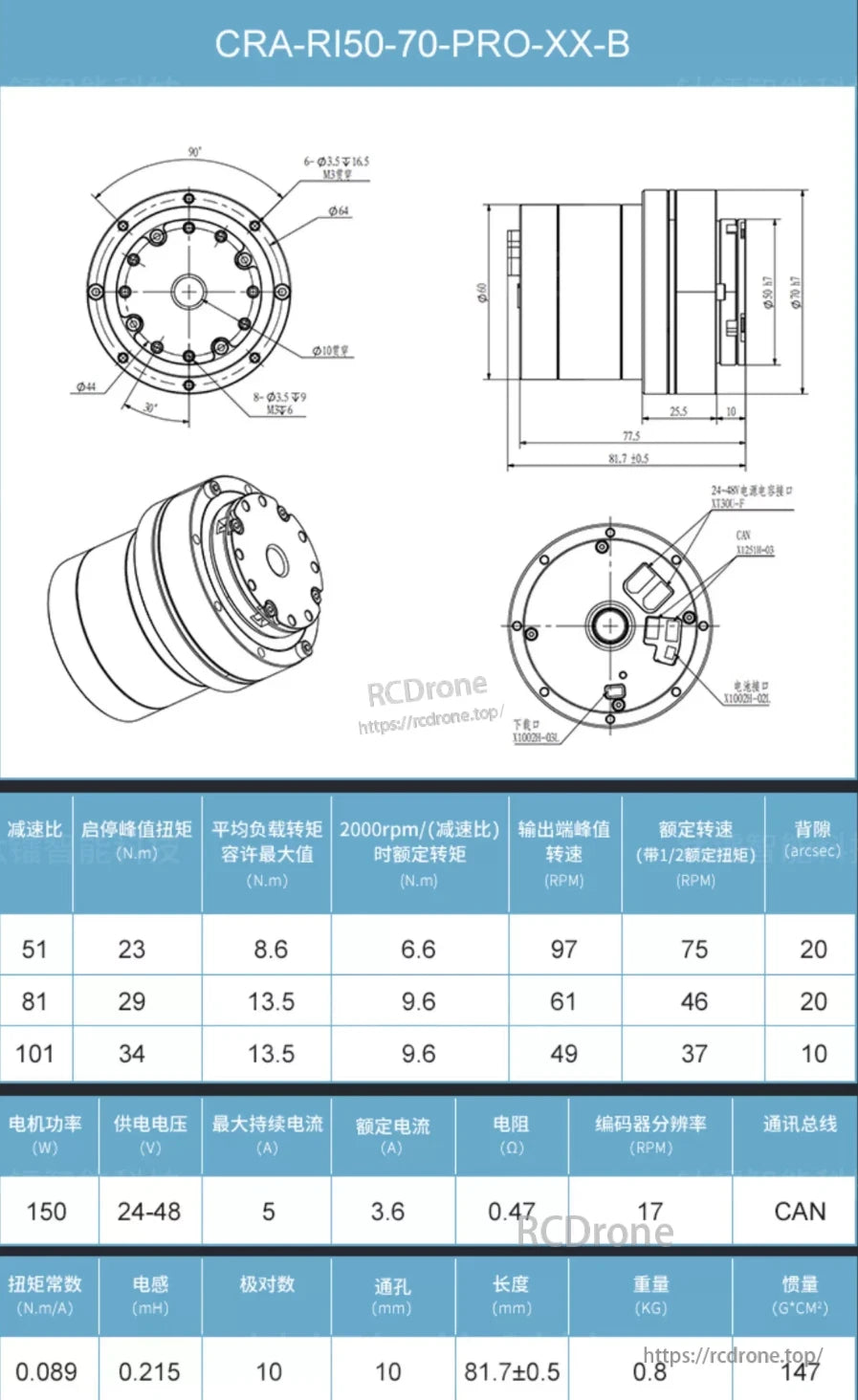
Articulación robótica con relaciones de engranaje de 51, 81 o 101, potencia de 150 W, alimentación de 24–48 V, comunicación CAN, resolución del codificador de 17 RPM, longitud de 81,7 ± 0,5 mm y peso de 0,8 kg.
Related Collections