






Ti5 Robot CRA-RI100-142-PRO-XX Actuador de articulación integrado, 1 kW, 24–48 V, hasta 169 N·m, IP65, CAN/EtherCAT, 51–161:1, freno opcional
Ti5 Robot CRA-RI100-142-PRO-XX Actuador de articulación integrado, 1 kW, 24–48 V, hasta 169 N·m, IP65, CAN/EtherCAT, 51–161:1, freno opcional
Ti5 Robot
No se pudo cargar la disponibilidad de retiro
Descripción general
El Robot Ti5 CRA-RI100-142-PRO-XX Es un actuador compacto de articulación integrada que combina un servomotor de imán permanente, un reductor de precisión, un codificador y una carcasa sellada. Forma parte de la serie PRO, diseñada para humanoides, exoesqueletos, cobots, AGV y mecanismos industriales, presentando Alta densidad de par, bajo nivel de ruido y protección IP65La interfaz del controlador es seleccionable (CAN o EtherCAT), la retroalimentación puede ser codificador simple o doble, y un freno de mantenimiento está disponible como opción. A Eje hueco de 32 mm Simplifica el paso de cables o de neumáticos a través de la unión.
Características principales
-
Par nominal de hasta 169 N·m (dependiente de la relación) con salida suave y de bajo cogging
-
Sellado IP65 Carcasa para funcionamiento resistente al polvo y al agua
-
24–48 V CC, 1 kW clase PMSM con alta eficiencia
-
CAN o EtherCAT bus de campo; codificador incremental simple/doble (17 bits)
-
Freno de retención opcional (-B) para posicionamiento seguro y retención con la potencia apagada
-
Salida de eje hueco (Ø32 mm); cableado pasante amigable
-
Larga vida &y alta confiabilidad; bajo ruido, alta precisión
-
Arnés precableado (5 metros) para una rápida integración
Presupuesto
Eléctrico &y general
-
Modelo: CRA-RI100-142-PRO-XX (-B = con freno)
-
Tipo de motor: Sincrónico de imán permanente
-
Potencia nominal: 1000 vatios
-
Tensión de alimentación: 24–48 V CC
-
Corriente nominal: 15,8 A | Corriente continua máxima: 16,9 A
-
Resistencia de fase: 0,12 Ω | Inductancia: 0,3 mH
-
Pares de polos: 8 | Constante de par: 0,175 N·m/A
-
Codificador: Incremental, 17 bits, simple o doble
-
Autobús: PODER (EtherCAT seleccionable)
-
Protección: IP65
-
Rango de rotación: 60°
-
Agujero pasante: Ø32 mm
-
Ambiente de funcionamiento: arriba a 60 °C
-
Longitud del cable: 5 metros
Envolvente mecánica
-
Sin freno: Longitud 95,7 ± 0,5 mm, masa 3,8 kg, inercia del rotor 3601 g·cm²
-
Con freno (-B): Longitud 115,7 ± 0,5 mm, masa 4,5 kg, inercia del rotor 4237 g·cm²
Nota: “100-142” en el nombre del modelo denota la clase de diámetro exterior nominal y la serie de longitud axial.
Rendimiento por relación de reducción — Sin freno
| Relación | Par máximo de arranque/parada (N·m) | Par de carga promedio máximo admisible (N·m) | Par nominal a 2000 rpm/relación (N·m) | Velocidad máxima de salida (rpm) | Velocidad nominal a ½ par nominal (rpm) | Reacción (arcosegundos) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Rendimiento por relación de reducción — Con freno (-B)
Los valores nominales de torque y velocidad son idénticos a los de la versión sin freno; las dimensiones/peso/inercia difieren (ver arriba).
| Relación | Par máximo de arranque/parada (N·m) | Par de carga promedio máximo admisible (N·m) | Par nominal a 2000 rpm/relación (N·m) | Velocidad máxima de salida (rpm) | Velocidad nominal a ½ par nominal (rpm) | Reacción (arcosegundos) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Aplicaciones
-
Robots humanoides: Articulaciones de hombro/cadera/rodilla/tobillo que requieren accionamiento sellado de alto torque
-
Robots colaborativos (cobots): Movimiento suave y silencioso con redundancia del codificador
-
Exoesqueletos &dispositivos de rehabilitación y amplificadores: Juntas compactas de alto par con manteniendo pulsado el botón de apagado (-B)
-
Cardanes & unidades de giro e inclinación: posicionamiento preciso con bajo juego
-
AGV &y maquinaria especial: escabroso IP65 Juntas para sitios polvorientos o húmedos
-
Automotor &y mecanismos marinos: Actuación sellada para sistemas de movimiento auxiliares
Detalles

Especificaciones del actuador CRA-RI100-142-PRO-XX: relaciones de transmisión de 51 a 161, 267 a 459 N.m par máximo, motor de 1000W, alimentación 24-48V, bus CAN, peso 3,8kg, inercia 3601 g·cm², resolución del encoder 17 RPM.
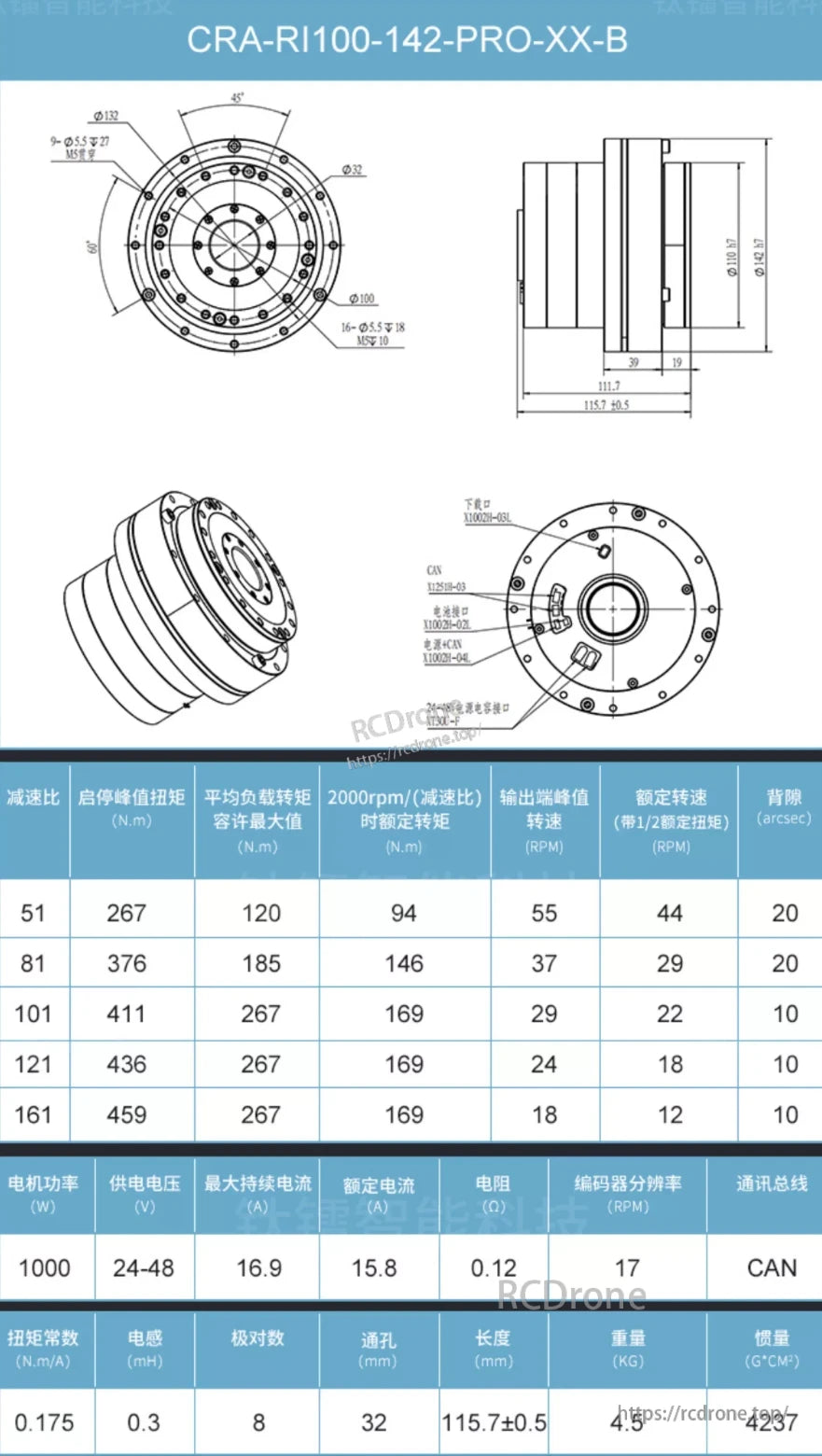
Especificaciones del actuador CRA-RI100-142-PRO-XX-B: motor de 1000 W, 24-48 V, corriente nominal de 15,8 A, resolución del codificador de 17 RPM, bus CAN, peso de 4,5 kg, longitud de 115,7 mm, múltiples relaciones de transmisión con datos de par y velocidad.






