






Módulo de motor de articulación Ti5 ROBOT CRA-RI40-52-PRO Motor 24-48V 90W Relación 51/101 Codificador de 16 bits
Módulo de motor de articulación Ti5 ROBOT CRA-RI40-52-PRO Motor 24-48V 90W Relación 51/101 Codificador de 16 bits
Ti5 ROBOT
No se pudo cargar la disponibilidad de retiro
Descripción
Ti5 ROBOT Motor CRA-RI40-52-PRO es un motor de módulo de articulación ligero para articulaciones robóticas. El texto destacado incluye: “MÓDULO DE ARTICULACIÓN LIGERO”, “Clave de avance en hardware central”, “Ligero” y “Tamaño pequeño, rendimiento potente”.
Características clave
Ligero / tamaño pequeño
- Diseño ultra-ligero con mayor usabilidad.
- Reducción de peso de más de 1/3.
- Reduce en gran medida el consumo de energía operativa.
Rendimiento
- Estándares de rendimiento de grado industrial.
- La densidad de par es el doble que la de productos similares.
- Grado automotriz, antiestático, antivibración.
Modularización
- Seis módulos están integrados orgánicamente.
- Tres series se adaptan de manera integral a los clientes en diferentes escenarios.
- Reduce enormemente la dificultad de producción; mejora la eficiencia de producción.
Estructura (etiquetas de vista explosiva)
- Cubierta trasera del motor
- Placa de control
- Encoder
- Cuerpo del estator
- Rotor del motor
- Estator del motor
- Reductores armónicos
- Cubierta Flexspline
Producción en masa / declaraciones de plataforma
- Ventaja de producción en masa líder en la industria.
- Todo el hardware subyacente puede ser controlado, y la tasa de localización puede alcanzar el 100%.
- Cadena de herramientas de software completa para el desarrollo de robots, ayudando a acelerar la investigación y el desarrollo.
- La plataforma de desarrollo rápido Ti5 Robot combina hardware y software, con un SDK de código abierto mencionado para disponibilidad futura.
Comparación de densidad de torque (Nm/kg)
- 250+: Ti5 Robot de próxima generación
- 254: Una marca americana
- 192: Modelo de producción en masa Ti5 Robot
- 80.4: Una marca china
- 53.5: Una marca canadiense
- 33.8: Una marca coreana
Texto de la leyenda: “Comparación de la densidad de torque de productos de articulación convencionales (Nm/kg)”.
Para orientación en la selección, preguntas sobre documentación o soporte de integración, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Aplicaciones
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Parámetro | Valor |
|---|---|
| Modelo de Motor | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| Relación de Reducción | 51 / 101 |
| Par de Arranque-Parada Máximo | 8.3 / 11 N.m |
| Par de Carga Promedio Máximo Permitido | 5.5 / 8.9 N.m |
| 2000 Rpm/(Relación de Reducción) Par Nominal a esta velocidad | 3.5 / 5 N·m |
| Velocidad Rotacional Máxima de Salida | 118 / 59 RPM |
| Velocidad Nominal | 80 / 40 RPM |
| Potencia del Motor | 90 W |
| Tensión de Suministro | 24-48 V |
| Corriente Continua Máxima | 3 A |
| Corriente Nominal | 2 A |
| Resolución del Encoder | 16 Bit |
| Despeje Trasero | 40 / 30 arcsec |
| Constante de Par | 0.05 N·m/A |
| Orificio | 12 mm |
| Longitud: Sin freno / Con freno | 62 ±0.5 mm / 82 ±0.5 mm |
| Peso: Sin freno / Con freno | 0.32 kg / 0.42 kg |
| Inercia: Sin freno / Con freno | 73 g·cm² / 116.2 g·cm² |
Manuales
Detalles

Diseñado para juntas robóticas compactas donde el bajo peso y la alta densidad de par son lo más importante.

Un diseño interno modular combina motor, reductor, placa de control y codificador en un módulo de junta integrado.

Construido sobre una plataforma de producción escalable con una cadena de herramientas de desarrollo destinada a acelerar la integración de robots.

El desglose a nivel de componente ayuda a confirmar lo que se incluye dentro del módulo de junta para la planificación del diseño y el mantenimiento.
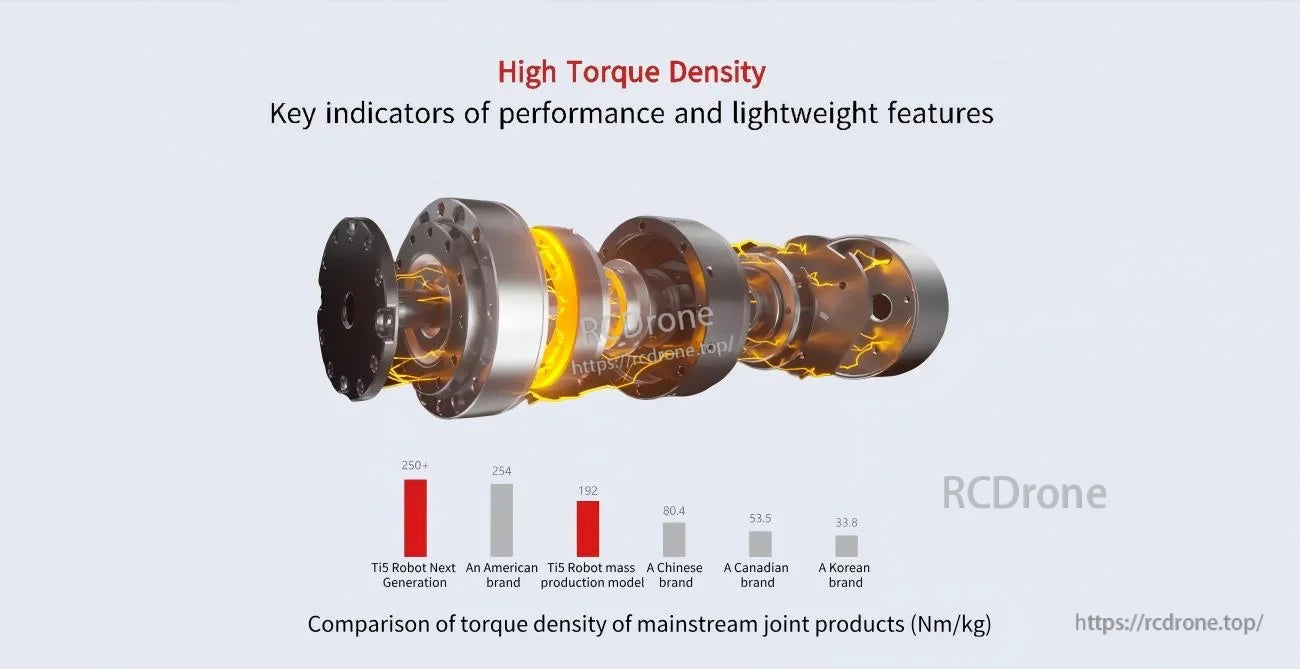
La comparación de densidad de par (Nm/kg) proporciona un contexto rápido en comparación con otros productos de juntas convencionales.
Related Collections






