



Ti5 Robot CRA-RI40-52-PRO-XX Actuador de articulación robótica integrada, accionamiento armónico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, eje hueco, codificador simple/doble (opción de freno)
Ti5 Robot CRA-RI40-52-PRO-XX Actuador de articulación robótica integrada, accionamiento armónico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, eje hueco, codificador simple/doble (opción de freno)
Ti5 Robot
No se pudo cargar la disponibilidad de retiro
Descripción general
El robot Ti5 CRA-RI40-52-PRO-XX es un módulo de articulación compacto e integrado que combina un motor de par sin marco, un reductor armónico de precisión, un servocontrolador y un codificador magnético en una sola unidad con certificación IP65. Con una alimentación de 24–48 V CC y una potencia nominal de 90 W, ofrece un par nominal de 7 N·m y una velocidad de salida nominal de 80 rpm para robots humanoides, exoesqueletos, brazos colaborativos, cardanes, vehículos guiados automáticos (AGV) y otras aplicaciones de alta gama. Un orificio pasante central facilita el cableado; existen configuraciones con uno o dos codificadores y una opción de freno de retención. La comunicación es CAN por defecto, con opción de EtherCAT.
Características principales
-
Motor integrado + variador + reductor armónico + codificador (magnético)
-
Par nominal 7 N·m; velocidad nominal de salida 80 rpm; potencia 90 W
-
Dos relaciones de reducción: 51:1 o 101:1
-
Alta precisión: codificador de 17 bits, juego típico de 40 segundos de arco (51)/30 segundos de arco (101)
-
Diseño de bajo ruido, bajo cogging y alta densidad de torque
-
Protección IP65; baja temperatura opcional &personalización a prueba de agua y amperios
-
Bus de comunicación: CAN (estándar) o EtherCAT (opcional)
-
Opciones de codificador simple o doble; versiones con freno o sin freno
-
Orificio pasante para cableado: 12 mm (estándar)/11 mm (freno)
-
Aplicaciones típicas: humanoides, articulaciones de cobots, exoesqueletos, robots de movimiento horizontal y vertical, equipos industriales, robots de inspección de potencia, sistemas marinos/de vehículos.
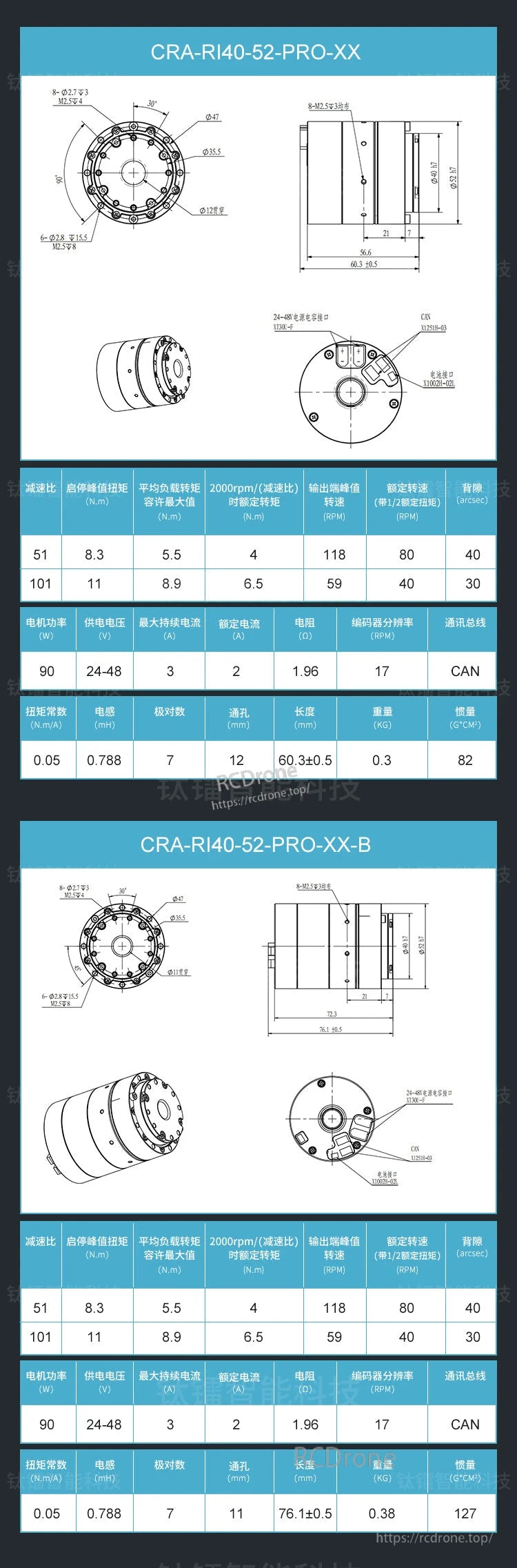
Rendimiento por relación de transmisión
| Artículo | 51:1 | 101:1 |
|---|---|---|
| Par máximo de arranque/parada (N·m) | 8.3 | 11 |
| Par de carga promedio máximo permitido (N·m) | 5.5 | 8.9 |
| Par nominal a 2000 rpm/(relación) (N·m) | 4 | 6.5 |
| Velocidad máxima de salida (rpm) | 118 | 59 |
| Velocidad nominal a ½ par nominal (rpm) | 80 | 80 |
| Reacción (arcosegundos) | 40 | 30 |
Especificaciones eléctricas
-
Tensión de alimentación: 24–48 V CC
-
Corriente nominal/continua: 2 A (máximo continuo 3 A)
-
Resistencia de fase: 1,96 Ω
-
Inductancia: 0,788 mH
-
Constante de par: 0,05 N·m/A
-
Pares de polos: 7
-
Resolución del codificador: 17 bits (magnético)
Mecánico &Interfaz de amplificador
-
Grado de protección: IP65
-
Velocidad nominal de salida: 80 rpm
-
Comunicación: PODER (por defecto)/EtherCAT (opción)
-
Orificio pasante (para cableado): Ø12 mm (estándar)/Ø11 mm (con freno)
-
Longitud & inercia (sin freno): 60,3 ± 0,5 mm, 82 g·cm²
-
Longitud & inercia (versión de freno -B): 76,1 ± 0,5 mm, 127 g·cm²
-
Masa: 0.3 kilos
-
Longitud del cable: 5 metros
-
Ambiente de funcionamiento (típico): hasta 60 °C
-
Materiales: componentes de aluminio con reductor armónico de precisión
Variantes &Opciones de amplificador
-
Comunicación: CAN o EtherCAT
-
Codificador: codificador magnético simple o doble
-
Freno: sin freno (estándar) o -B versión con freno de retención
-
Ambiente: Paquete de impermeabilización y baja temperatura personalizable
-
Notación de serie: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (indica reductor, sensor de torque/codificador, conteo, relación, protección, etc.)
Aplicaciones típicas
Articulaciones humanoides (hombro/codo/cadera/rodilla), brazos robóticos colaborativos, actuadores de exoesqueleto, cardanes de visión y giro e inclinación, ejes de automatización industrial, UGV/AGV de inspección de potencia y mecanismos auxiliares para vehículos marinos y vehículos terrestres.
Notas
-
Realice la instalación utilizando los patrones de tornillos y las tolerancias especificadas que se muestran en los dibujos.
-
Confirme la relación, la configuración del codificador, el bus de comunicación y el requisito de freno antes de realizar el pedido.
-
Debido a la naturaleza industrial de este producto, las unidades instaladas/usadas generalmente no se pueden devolver; consulte la documentación de dimensionamiento con el personal técnico antes de realizar la compra.
Detalles
El actuador de articulación robótica Ti5 CRA-R140-52-PRO-XX y -B ofrece 90 W de potencia, suministro de 24 a 48 V, corriente máxima de 3 A, resolución de codificador de 17 RPM, torque, velocidad y comunicación CAN.

El actuador de articulación robótica Ti5 modelo CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) incluye freno, sensor de torsión, codificadores duales, clasificación de resistencia al agua, relación de reducción, diámetro exterior y tipo de motor.

Actuadores articulados serie PRO para robots humanoides, exoesqueletos, robots colaborativos, automóviles y vehículos guiados automáticos (AGV). Características: alta robustez, larga vida útil, alta densidad de par, bajo par de retención, impermeables, a prueba de polvo y a prueba de explosiones, bajo nivel de ruido, alta precisión y diseño de eje hueco.



