






Módulo de articulación de motor Ti5 ROBOT CRA-RI50-70-PRO 150W 24-48V Codificador 16 bits Reducción 51/81/101
Módulo de articulación de motor Ti5 ROBOT CRA-RI50-70-PRO 150W 24-48V Codificador 16 bits Reducción 51/81/101
Ti5 ROBOT
No se pudo cargar la disponibilidad de retiro
Descripción
Ti5 ROBOT El motor CRA-RI50-70-PRO es un módulo de articulación ligero diseñado para articulaciones robóticas y actuación integrada. El módulo se describe con “tamaño pequeño, rendimiento potente” y “clave de avance en hardware central,” y presenta una construcción modular integrada.
Características Clave
- Módulo de articulación ligero diseño.
- Ultra-ligero: “Reduce el peso en más de 1/3”; “Reduce en gran medida el consumo de energía operativa.”
- Rendimiento más fuerte: “Estándares de rendimiento de grado industrial”; “La densidad de par es el doble que la de productos similares.”
- Modularización: “Seis módulos están integrados orgánicamente”; “Tres series se adaptan de manera integral a los clientes en diferentes escenarios”; “Reduce en gran medida la dificultad de producción, mejora la eficiencia de producción.”
- Producción en masa / notas de plataforma (como se indica): “Ventaja de producción en masa líder en la industria.” “Todo el hardware subyacente puede ser controlado, y la tasa de localización puede alcanzar el 100%.” “Posee una cadena de herramientas de software completa para el desarrollo de robots, ayudando a acelerar la investigación y el desarrollo.”
- Etiquetas de estructura explosiva: Cubierta trasera del motor; Placa de control; Encoder; Carcasa del estator; Rotor del motor; Estator del motor; Reductores armónicos; Cubierta de Flexspline.
- Texto del gráfico de comparación de densidad de torque: “Comparación de la densidad de torque de productos de unión convencionales (Nm/kg)” con valores etiquetados: 250+ (Ti5 Robot Next Generation), 254 (Una marca americana), 192 (Modelo de producción en masa Ti5 Robot), 80.4 (Una marca china), 53.5 (Una marca canadiense), 33.8 (Una marca coreana).
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Parámetro | Valor |
|---|---|
| Modelo de motor | CRA-RI50-70-PRO-XX / CRA-RI50-70-PRO-XX-B |
| Relación de reducción | 51 / 81 / 101 |
| Par de arranque-parada máximo | 23 / 29 / 34 N.m |
| Par de carga promedio máximo permitido | 8.6 / 13.5 / 13.5 N.m |
| 2000 Rpm/(Relación de reducción) Par nominal a esta velocidad | 6.6 / 9.6 / 9.6 N·m |
| Velocidad de Rotación Pico de Salida | 97 / 61 / 49 RPM |
| Velocidad Nominal | 75 / 46 / 37 RPM |
| Potencia del Motor | 150 W |
| Tensión de Suministro | 24-48 V |
| Corriente Continua Máxima | 5 A |
| Corriente Nominal | 3.6 A |
| Resolución del Encoder | 16Bit |
| Despeje Posterior | 20 / 20 / 10 arcsec |
| Constante de Par | 0.089 N·m/A |
| Orificio | 12 mm |
| Longitud: Sin freno / Con freno | 63±0.5 mm / 81.5±0.5 mm |
| Peso: Sin freno / Con freno | 0.66 kg / 0.78 kg |
| Inercia: Sin freno / Con freno | 158.8 g·cm² / 228.8 g·cm² |
Manuales
Dimensiones de instalación del motor CRA-RI50-70-PRO Drawing.pdf
Para ayuda en la selección (opciones de relación de reducción, elección de versión de freno) y soporte de integración, contacte [email protected] or visite https://rcdrone.top/.
Detalles

Diseñado para juntas robóticas integradas donde el bajo peso y el empaquetado compacto son importantes.

Una construcción modular integrada combina partes clave en un actuador compacto para juntas robóticas.


Los componentes principales incluyen la placa de control, el encoder, el estator/rotor del motor y el reductor armónico para una salida de par compacto.
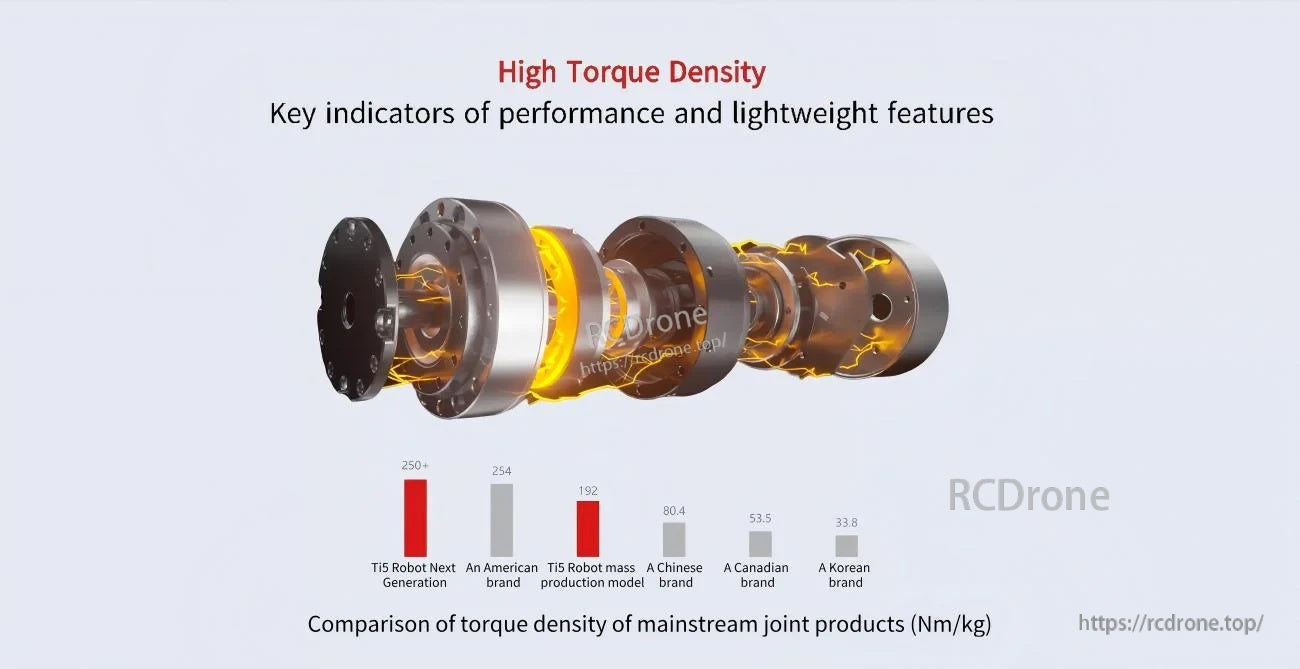
La densidad de par se destaca con un gráfico comparativo contra otros productos de juntas convencionales.
Related Collections






