


Actuador de junta de eje hueco Ti5 Robot CRA-RI60-70-PRO-S-XX, 24–48 V CAN/EtherCAT, IP65, 51–102:1, hasta 66 N·m pico, opción de freno -B
Actuador de junta de eje hueco Ti5 Robot CRA-RI60-70-PRO-S-XX, 24–48 V CAN/EtherCAT, IP65, 51–102:1, hasta 66 N·m pico, opción de freno -B
Ti5 Robot
No se pudo cargar la disponibilidad de retiro
Descripción general
El Robot Ti5 CRA-RI60-70-PRO-S-XX es una articulación robótica compacta, integrada y de eje hueco para brazos, humanoides, exoesqueletos, mecanismos de vehículos aéreos no tripulados (UAV) y plataformas móviles. Combina un motor de par BLDC sin marco, un reductor de precisión, un codificador absoluto magnético (simple o doble) y una interfaz de accionamiento en un solo módulo IP65. La arquitectura PRO-S prioriza la miniaturización y una rápida respuesta dinámica, manteniendo una alta relación carga-peso. La comunicación es CAN por defecto, con EtherCAT disponible. La versión de freno de fábrica "-B" añade un freno de retención para la seguridad en caso de apagado. (Todos los valores a continuación se extraen de las hojas de datos y capturas de pantalla del producto).
Características principales
-
Módulo de unión compacto de eje hueco (serie Ø60/Ø70) para facilitar el enrutamiento de cables y componentes neumáticos
-
Relaciones 51, 81, 101, 102 con juego reducido (hasta 10 segundos de arco según la relación)
-
Par máximo de hasta 66 N·m; par nominal de hasta 30 N·m (condición de relación de 2000 rpm)
-
Respuesta rápida; diseño de alta relación carga-peso (≈0,69 kg estándar/≈0,84 kg con freno)
-
Carcasa resistente al agua y al polvo IP65, estructura de aluminio
-
Codificador absoluto magnético de 17 bits; opciones de codificador simple o doble
-
Alimentación de 24–48 V CC, bus CAN (EtherCAT opcional); eje pasante Ø18 mm
-
La variante “-B” agrega freno de potencia; carrocería más larga y mayor inercia para sostenerse
Presupuesto
Eléctrico común &lificador; mecánico
-
Potencia del motor: 300 W
-
Tensión de alimentación: 24–48 V CC
-
Corriente continua máxima: 6,7 A; Corriente nominal: 5 A; Resistencia de fase: 0,33 Ω
-
Constante de par: 0,096 N·m/A; Inductancia: 0,074 mH; Pares de polos: 10
-
Codificador: absoluto magnético, 17 bits; seleccionable simple/doble
-
Comunicación: CAN (EtherCAT opcional)
-
Orificio pasante: 18 mm; Protección: IP65
Por relación de transmisión (CRA-RI60-70-PRO-S-XX)
| Relación | Par máximo de arranque/parada (N·m) | Par máximo continuo/promedio (N·m) | Par nominal a 2000 rpm/relación (N·m) | Velocidad máxima de salida (rpm) | Velocidad nominal a ½ par nominal (rpm) | Reacción (arcosegundos) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Factor de forma & inercia
-
Estándar (-XX): longitud 70,7 ± 0,5 mm; peso 0,69 kg; inercia del rotor 382 g·cm²
-
Con freno (-XX-B): longitud 89,7 ± 0,5 mm; peso 0.84 kg; inercia del rotor 538 g·cm²
Otros datos del catálogo
-
Valor de referencia del par nominal: 30 N·m
-
Velocidad nominal típica: 30 rpm (dependiente de la relación)
-
Temperatura de funcionamiento: hasta 60 °C
-
Montaje: montaje con tornillos; interfaz de eje con chaveta
Notas: El codificador simple/doble, la opción de freno y el tipo de bus se pueden seleccionar al realizar el pedido; EtherCAT se muestra como "Ether-cat" en las capturas de pantalla. Todas las dimensiones y especificaciones anteriores se extraen directamente de las hojas de datos proporcionadas para CRA-RI60-70-PRO-S-XX y CRA-RI60-70-PRO-S-XX-B.
Aplicaciones
-
Brazos robóticos colaborativos e industriales de 6 ejes
-
Articulaciones humanoides (hombro, codo, cadera, rodilla)
-
Exoesqueletos y dispositivos de rehabilitación
-
Cardanes/mecanismos para UAV y manipuladores de luz
-
Mecanismos AGV/AMR, pequeñas máquinas herramienta y automatización de laboratorio
Detalles
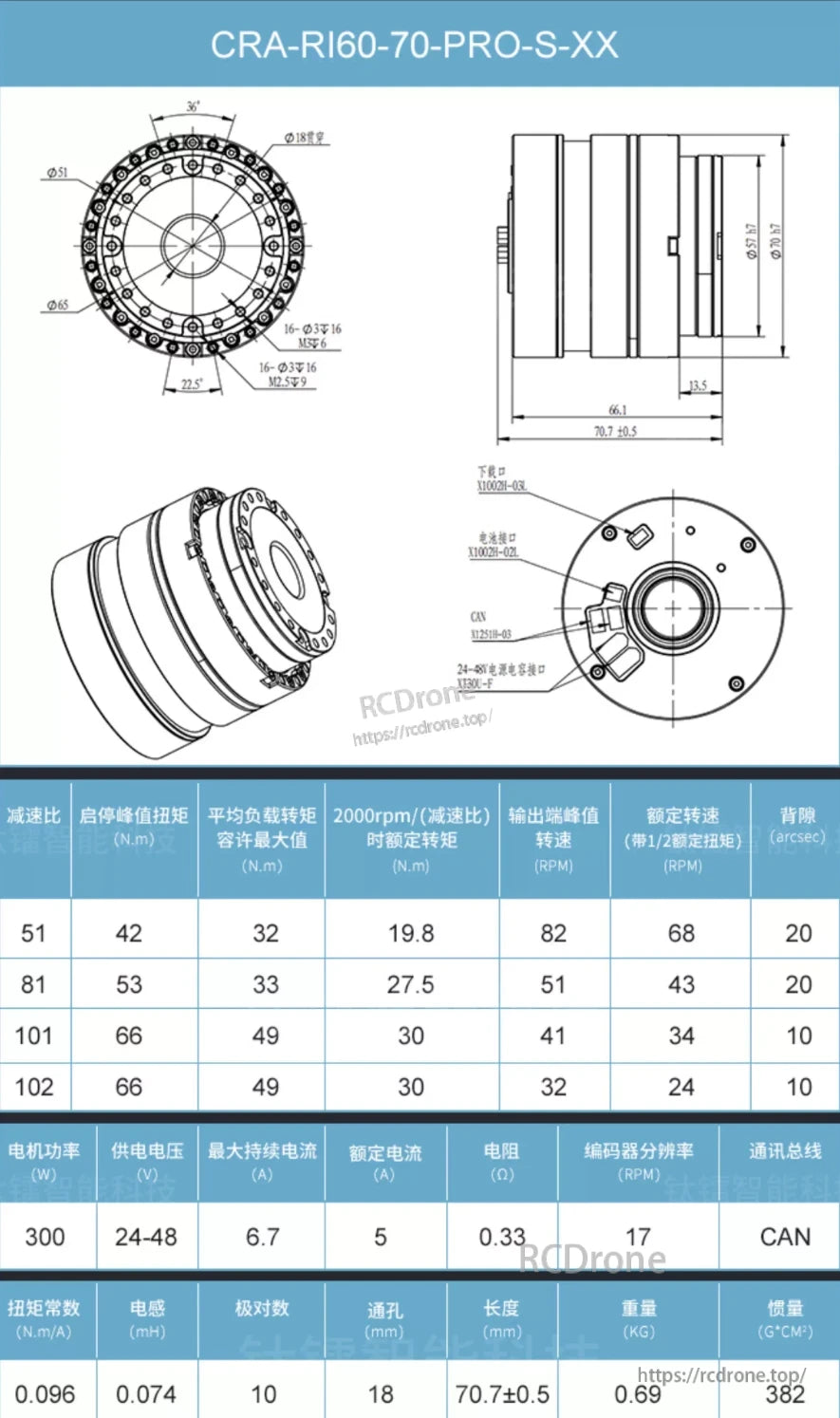
Especificaciones del actuador CRA-RI60-70-PRO-S-XX: motor de 300 W, 24-48 V, corriente nominal de 5 A, resolución del codificador de 17 RPM, comunicación CAN, peso de 0,69 kg, inercia de 382 G·CM², múltiples relaciones de transmisión con datos de par y velocidad.

Especificaciones del actuador CRA-RI60-70-PRO-S-XX-B: Motor de 300 W, 24-48 V, corriente nominal de 5 A, resistencia de 0,33 Ω, resolución del codificador de 17 RPM, bus CAN, peso de 0,84 kg, inercia de 538 G·cm². Dimensiones: 89,7 ± 0,5 mm de longitud, Ø 70,37 mm.


