Ti5 Robot CRA-RI60-80-PRO-XX Módulo de articulación robótica integrada: accionamiento armónico, 24–48 V, CAN/EtherCAT, codificador de 17 bits
Ti5 Robot CRA-RI60-80-PRO-XX Módulo de articulación robótica integrada: accionamiento armónico, 24–48 V, CAN/EtherCAT, codificador de 17 bits
Ti5 Robot
No se pudo cargar la disponibilidad de retiro
Descripción general
El robot Ti5 CRA-RI60-80-PRO-XX es una articulación compacta de eje hueco integrada para humanoides, cobots y manipuladores móviles. Combina un reductor armónico ultrafino, motor de par sin marco, Servoaccionamiento FOC, y codificador magnético absoluto en un solo módulo, entregando Salida con juego casi nulo, bajo nivel de ruido y alta densidad de par. La junta soporta PODER o EtherCAT, codificadores simples o duales, y un freno de retención opcionalHay dos longitudes disponibles: la PRO-XX estándar y la extendida. PRO-XX-B (cuerpo más largo, mayor inercia del rotor, orificio pasante más grande).
Características principales
-
Articulación todo en uno: reductor armónico + motor de par + driver FOC + codificador absoluto.
-
Reacción casi nula en la salida; control suave de baja velocidad y bajo ruido acústico.
-
Diseño de eje hueco Para paso de cables y vías respiratorias; relaciones de reducción múltiples.
-
Codificador absoluto de 17 bits, memoria de posición en caso de pérdida de potencia; opcional codificador dual versión.
-
Comunicación: PODER o EtherCAT Seleccionable.
-
Fuerza: 24–48 V, controlador integrado, clase de potencia del motor de 300 W.
-
Freno de retención opcional; IP/resistente al agua &lificador; baja temperatura Personalización disponible.
-
Listo para la aplicación para cardanes, humanoides, cobots, equipos industriales, robots de patrulla y dispositivos marinos.
Presupuesto
Eléctrico &Control de amplificador (compartido por PRO-XX/PRO-XX-B)
-
Potencia nominal del motor: 300 vatios
-
Tensión de alimentación: 24–48 V CC
-
Corriente continua máxima: 6.7 A; corriente nominal: 5 A
-
Resistencia de fase: 0,33 Ω
-
Constante de par: 0,096 N·m/A
-
Inductancia: 0,074 mH
-
Pares de polos: 10
-
Codificador: absoluto de 17 bits; opciones de codificador simple/doble
-
Autobús: PODER (estándar) o EtherCAT (opción)
Mecánico (eje hueco)
-
Orificio pasante (PRO-XX): Ø15 mm
-
Orificio pasante (PRO-XX-B): Ø18 mm
-
Longitud (PRO-XX): 70,4 ± 0,5 mm; peso ≈1,01 kilogramos; inercia del rotor ≈441 g·cm²
-
Longitud (PRO-XX-B): 92,9 ± 0,5 mm; peso ≈1,17 kilogramos; inercia del rotor ≈595 g·cm²
-
Montaje: círculo de pernos en la cara frontal (salida hueca); reductor armónico integrado
-
Opciones: freno de retención; codificador simple/doble; CAN/EtherCAT; impermeabilización &paquete de baja temperatura
Opciones de reductor &rendimiento del amplificador (lado de salida)
Reacción: tan baja como 10–20 segundos de arco dependiendo de la proporción.
| Relación de reducción | Par máximo de arranque/parada (N·m) | Par de carga promedio máximo (N·m) | Par nominal a 2000 rpm/relación (N·m) | Velocidad máxima (rpm) | Velocidad nominal a ½ par nominal (rpm) | Reacción (arcosegundos) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Notas:
• Los datos anteriores se leen de las hojas de producto para CRA-RI60-80-PRO-XX y PRO-XX-B.
• PRO-XX-B comparte la misma tabla de torque/velocidad; proporciona un orificio pasante más grande y una mayor inercia con el cuerpo más largo.
Aplicaciones
-
Humanoide &robots de servicio y amplificadores:articulaciones de hombro, codo, cadera, rodilla y tobillo con alta densidad de torsión.
-
Brazos robóticos colaborativos:Ejes precisos con bajo juego para un control de fuerza suave.
-
Cardanes &unidades de giro e inclinación:Seguimiento silencioso y estable a baja velocidad con memoria de posición absoluta.
-
Equipos industriales &Manipuladores AGV/AMR:Actuación integrada compacta para espacios reducidos.
-
Robots de inspección y patrullaje de potencia; dispositivos marinos/de a bordo (con opción impermeable).
Detalles
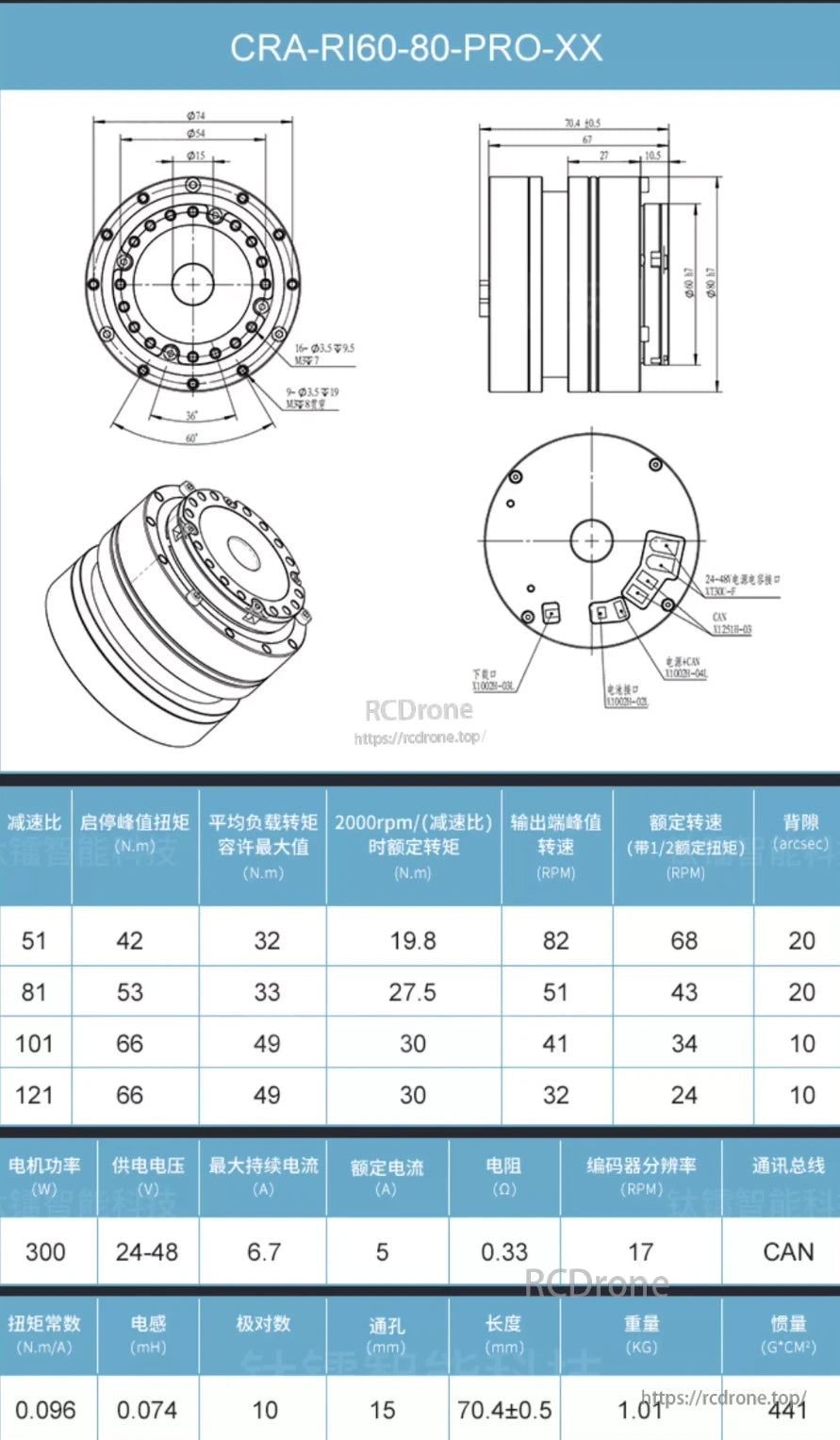
Especificaciones del módulo de articulación robótica CRA-RI60-80-PRO-XX: motor de 300 W, entrada de 24-48 V, bus CAN, codificador 17 CPR, longitud de 70,4 mm, peso de 1,01 kg, múltiples relaciones de transmisión con datos de torque y velocidad proporcionados.
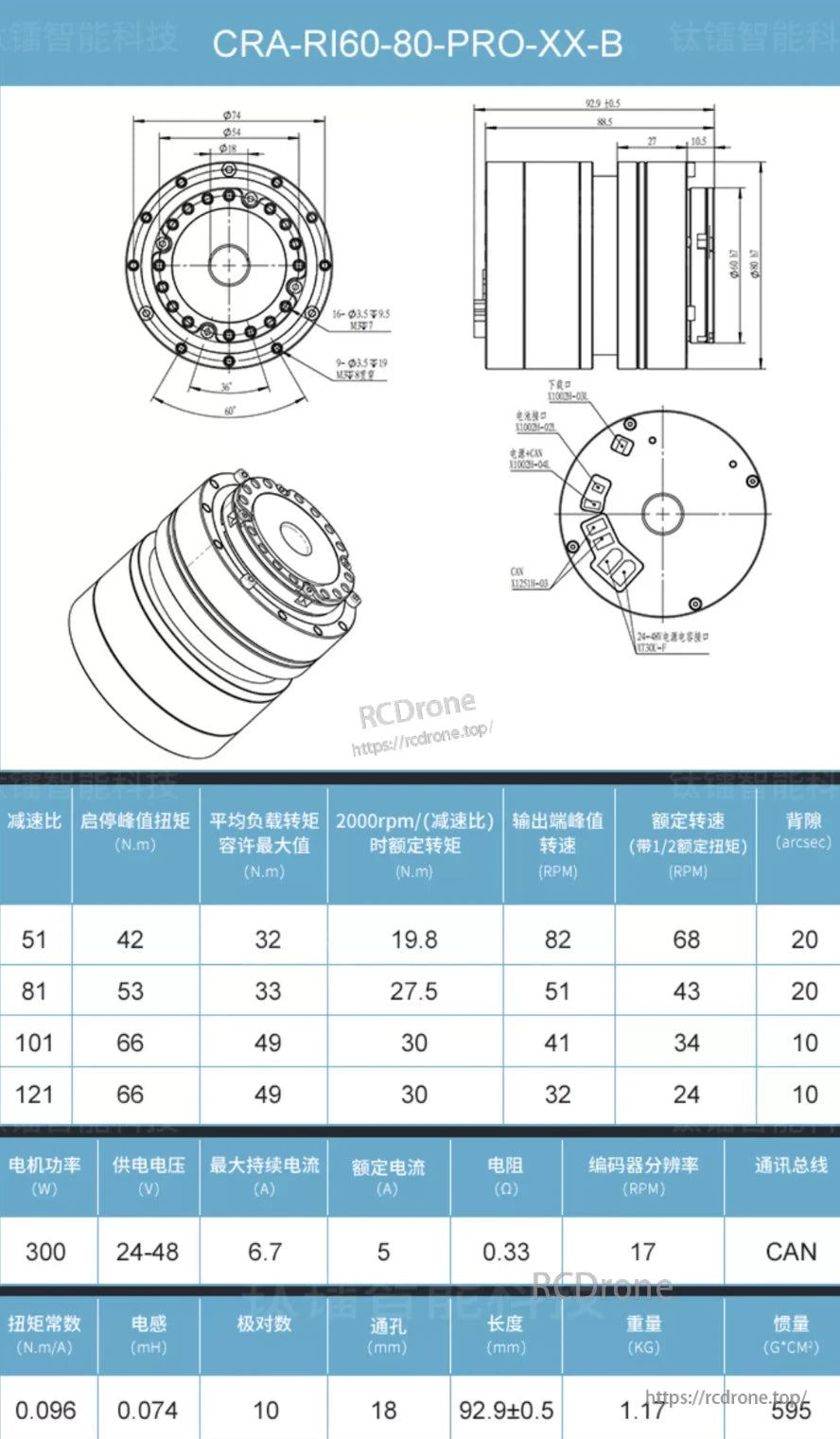
Módulo de articulación robótica CRA-RI60-80-PRO-XX-B con motor de 300 W, alimentación de 24-48 V, comunicación CAN, resolución del codificador de 17 RPM y múltiples relaciones de transmisión. Especificaciones clave: par, velocidad, corriente y dimensiones.
Related Collections