







TLIBOT FHS-SJ Relación 50/80/100, Par nominal 5.7-8.2 Nm, Par máx. 36-56 Nm Motor robótico para robótica
TLIBOT FHS-SJ Relación 50/80/100, Par nominal 5.7-8.2 Nm, Par máx. 36-56 Nm Motor robótico para robótica
TLIBOT
No se pudo cargar la disponibilidad de retiro
Resumen
TLIBOT FHS-SJ es un motor robótico diseñado para juntas robóticas de precisión donde se requieren transmisión compacta y par estable. El Modelo 14 ofrece opciones de relación de reducción de 50, 80 y 100, con valores de par nominal, pico e instantáneo definidos a 2000 r/min de entrada. Esta configuración es adecuada para robots humanoides, brazos robóticos, exoesqueletos y plataformas móviles que requieren actuación controlada.
Características clave
- Modelo: 14
- Opciones de relación de reducción: 50 / 80 / 100
- Par nominal a 2000 r/min de entrada: 5.7 Nm, 8.2 Nm, 8.2 Nm
- Par pico permitido al inicio y al detenerse: 19 Nm, 24 Nm, 29 Nm
- Valor máximo permitido del par de carga promedio: 7.2 Nm, 11.6 Nm, 11.6 Nm
- Par torque máximo instantáneo permitido: 36 Nm, 49 Nm, 56 Nm
- Velocidad máxima de entrada permitida: 8500 r/min
- Velocidad promedio de entrada permitida: 3500 r/min
Especificaciones
| Parámetro | 50 | 80 | 100 |
|---|---|---|---|
| Modelo | 14 | 14 | 14 |
| Par nominal a 2000 r/min de entrada (Nm) | 5.7 | 8.2 | 8.2 |
| Par nominal a 2000 r/min de entrada (kgfm) | 0.58 | 0.84 | 0.84 |
| Par máximo permitido al inicio y parada (Nm) | 19 | 24 | 29 |
| Par máximo permitido al inicio y parada (kgfm) | 1.9 | 2.4 | 3.html 0 |
| Valor Máximo Permitido del Par de Carga Promedio (Nm) | 7.2 | 11.6 | 11.6 |
| Valor Máximo Permitido del Par de Carga Promedio (kgfm) | 0.74 | 1.2 | 1.2 |
| Par Instantáneo Máximo Permitido (Nm) | 36 | 49 | 56 |
| Par Instantáneo Máximo Permitido (kgfm) | 3.7 | 5.0 | 5. 7 |
| Velocidad de entrada máxima permitida (r/min) | 8500 | 8500 | 8500 |
| Velocidad de entrada promedio permitida (r/min) | 3500 | 3500 | 3500 |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
- FHS-14-XXX-SJ--Product_structure_diagram.pdf
- FHS-17-XXX-SJ--Product_structure_diagram.pdf
- FHS-20-XXX-SJ--Product_structure_diagram.pdf
- FHS-25-XXX-SJ--Product_structure_diagram.pdf
- FHS-32-XXX-SJ--Product_structure_diagram.pdf
- FHS-40-XXX-SJ--Product_structure_diagram.pdf
- FHS-SJ_3D_Model_STEP.zip
- WK8110_2D_drawing.pdf
Para ayuda con la integración de CAD o soporte en la selección de productos, contacta [email protected] o visita https://rcdrone.top/.
Detalles

Reductor armónico TLIBOT, transmisión de precisión, 15 años de experiencia, modelos de tamaño 3-100, personalización completa, servicio integral.
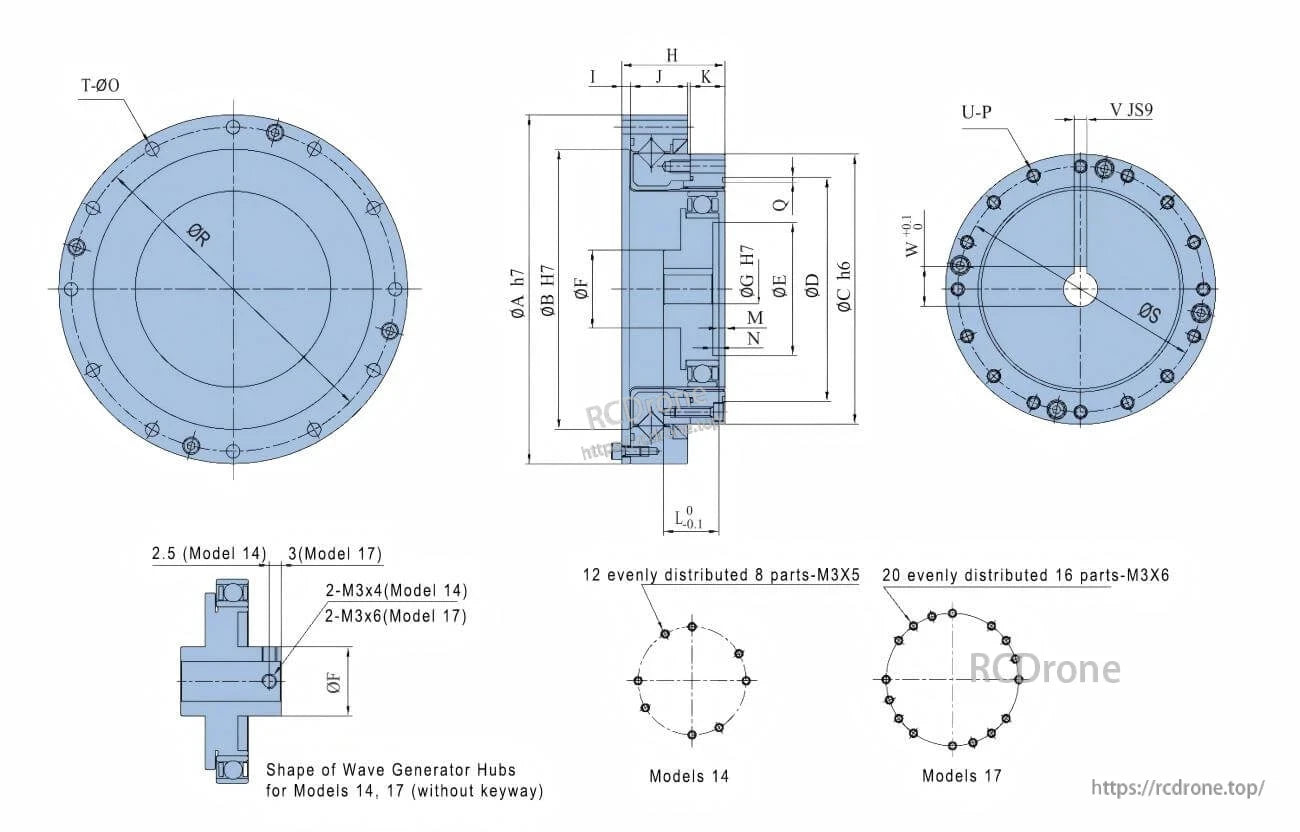
Dibujo técnico de los ejes de motor de robot TLibot Modelos 14 y 17, detallando dimensiones, patrones de tornillos, formas de ejes generadores de ondas y especificaciones para modelos sin chavetero. Presenta anotaciones de medidas precisas y vistas detalladas para una fabricación exacta.
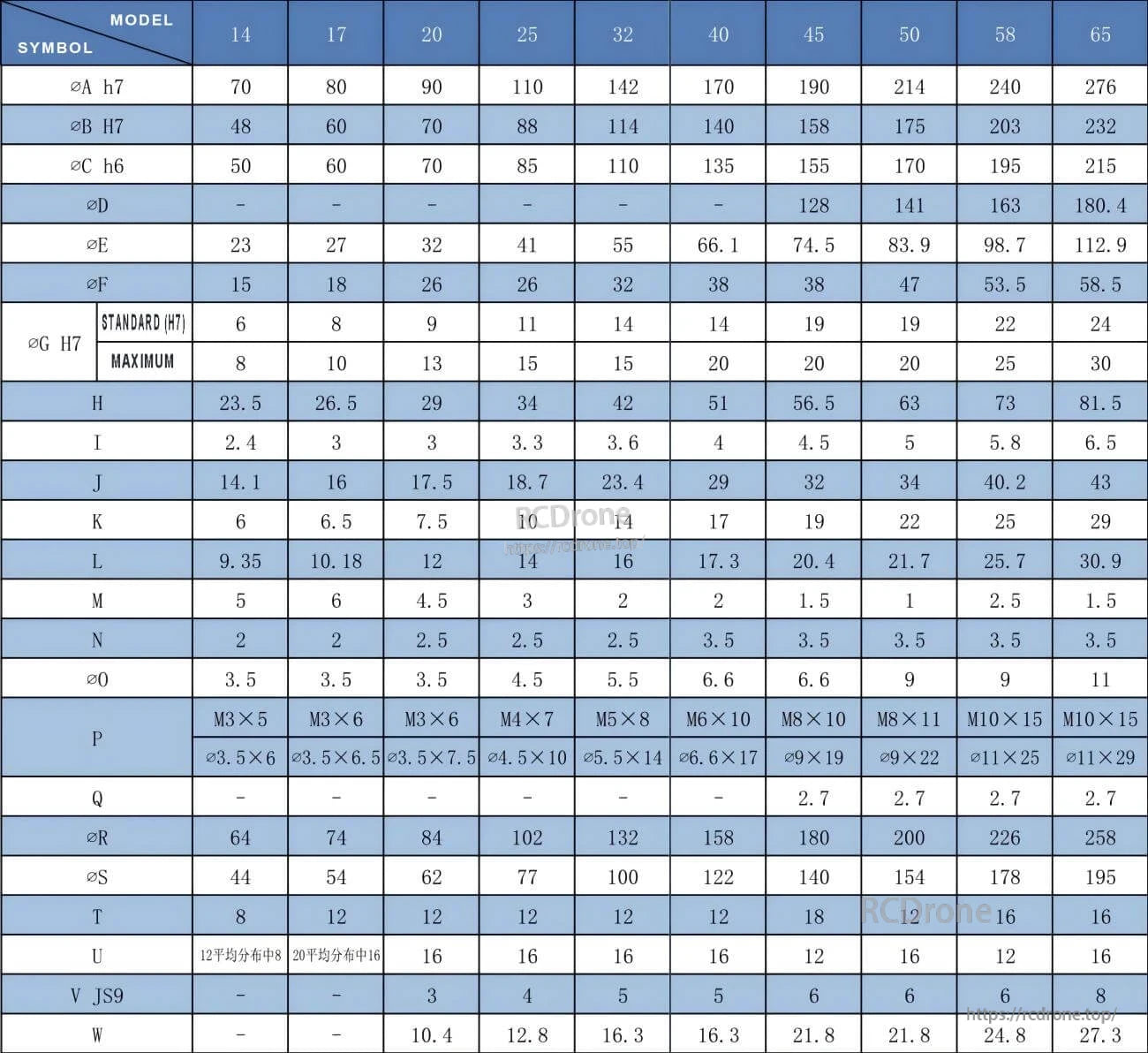
Especificaciones del motor para TLibot Modelos 14–65, incluyendo dimensiones del eje, longitudes, detalles de montaje y tolerancias para una integración mecánica precisa entre modelos.
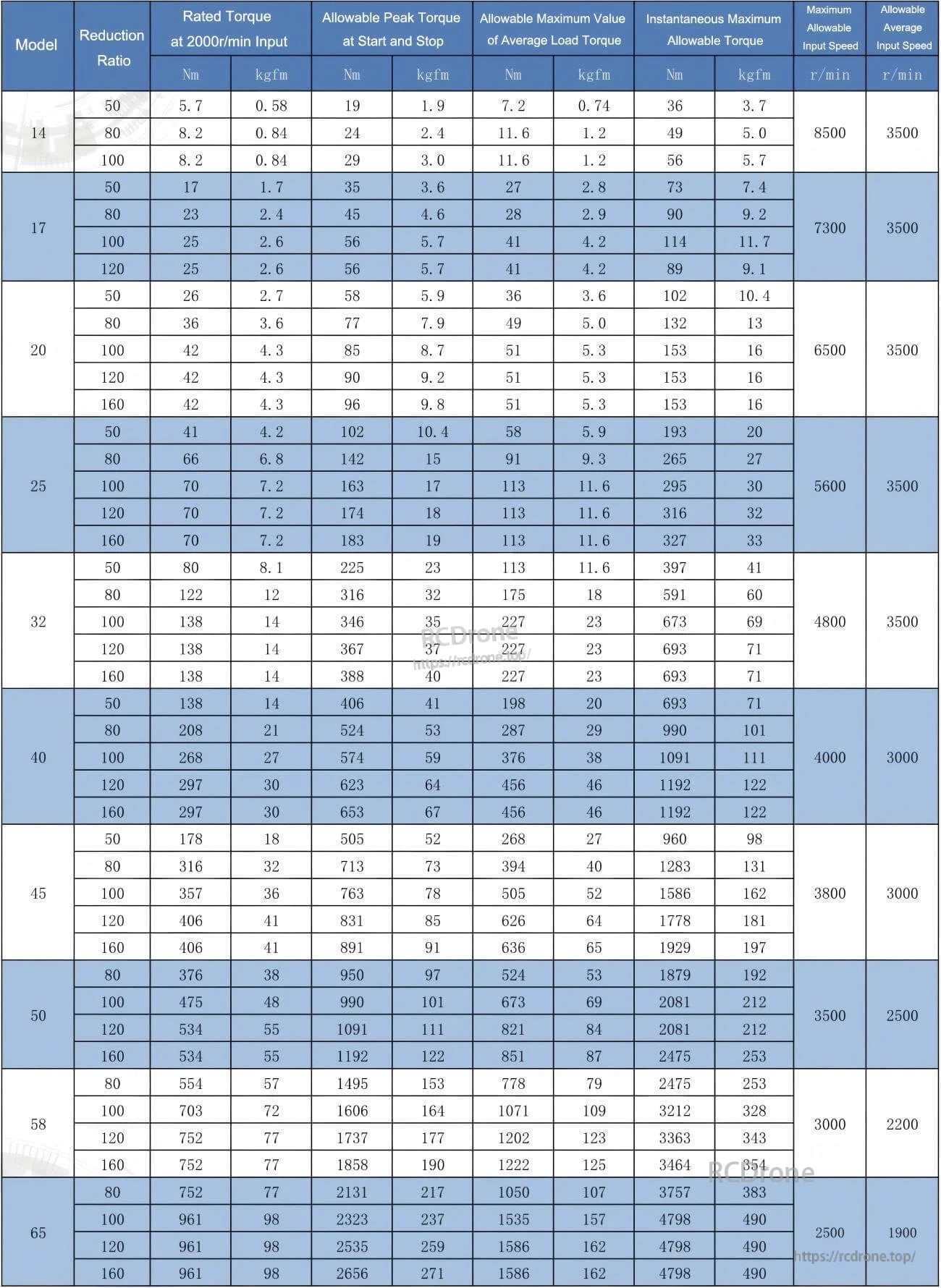
Motores de robot TLibot: números de modelo, relaciones de reducción, par, velocidades de entrada y pares permitidos bajo diversas condiciones operativas.
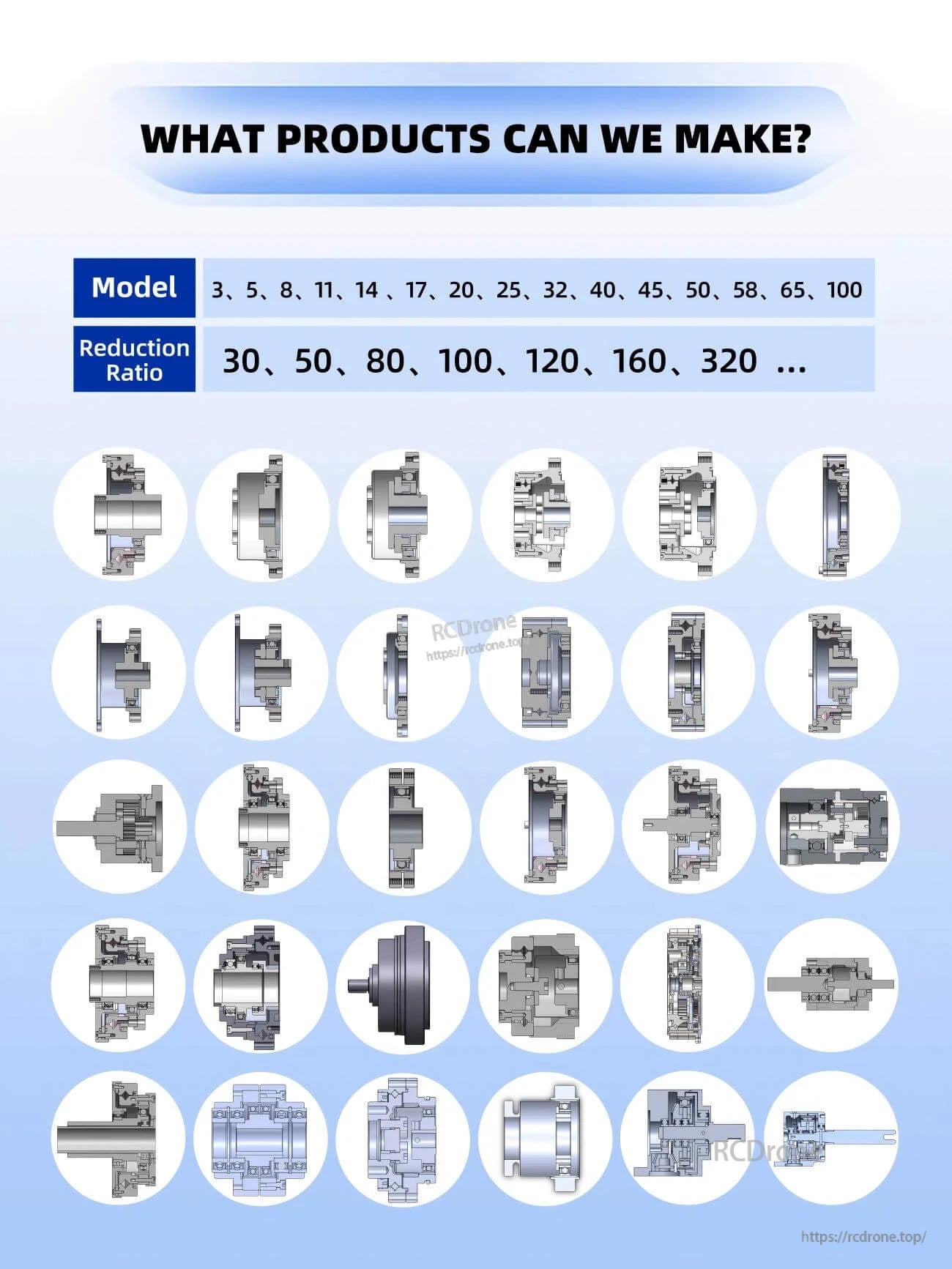
Los productos incluyen varios modelos: 3, 5, 8, 11, 14, 17, 20, 25, 32, 40, 45, 50, 58, 65, 100. Relaciones de reducción: 30, 50, 80, 100, 120, 160, 320. Se muestran múltiples diseños de motores de engranaje.
Related Collections







