








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Acelerómetro, giroscopio e inclinómetro de 6 ejes, compatible con ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Acelerómetro, giroscopio e inclinómetro de 6 ejes, compatible con ROS/Matlab
WitMotion
No se pudo cargar la disponibilidad de retiro
Resumen
El WitMotion HWT601-AGV-485 es un sensor de actitud/dirección de 6 ejes diseñado para robots AGV, drones y plataformas autónomas. Combina aceleración de 3 ejes + velocidad angular de 3 ejes y emite ángulo de 3 ejes &y cuaternión a través de RS485 (Modbus) a una frecuencia de hasta 200 Hz. El módulo cuenta con filtrado dinámico de Kalman, calibración de plato giratorio de alta precisión, adquisición de sesgo automática/manual, fuente de alimentación de respaldo para guardar la dirección al apagarse, y una carcasa impermeable/dustproof IP67. También soporta cascada de múltiples niveles (hasta 32 unidades) para medición de actitud sincronizada.
Características Clave
-
Ángulo de alta precisión: precisión XY 0.1°; precisión Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Sesgo de giroscopio estable: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Amplia entrada 9–36 V, corriente de funcionamiento ≈ 8 mA @12 V.
-
RS485 Modbus, velocidad 4,800–230,400 bps.
-
Muestreo: lectura de solicitud-respuesta hasta 200 Hz.
-
Algoritmo: fusión de filtro de Kalman y algoritmo de dirección AGV dedicado.
-
Software: suite gratuita para PC con paneles de control en vivo, gráficos de curvas, visualización 3D (coche/esfera/cubo/planos), configuración (sesgo, referencia de ángulo, calibración de aceleración, factores de escala), grabación de datos &y guardado directo, y importación de Matlab.
-
Amigable para desarrolladores: programas de ejemplo y soporte de código para ROS, Linux, C/C#, Python.
-
Ambiental: IP67, -40~80 °C (se muestra variante de tabla -40~85 °C).
-
Cascada: hasta 32 sensores en RS485 para medición de actitud simultánea.
Directrices de instalación
-
Monte el sensor en una superficie plana, estable y ajustada; bases irregulares causan error de ángulo (ver FIG.1–2).
-
Mantenga el eje del sensor paralelo al eje medido; evite ángulos entre ejes (ver FIG.3–4).
-
Este modelo solo admite instalación horizontal.
Software &y Visualización
-
Panel de Datos Poderoso (ángulos, tasa, aceleración, magnitud, cuaternión, puertos, temperatura, voltaje, etc.).
-
Panel de configuración: tasa de baudios, dirección del dispositivo, adquisición automática de sesgo, reinicio del eje Z, calibración de aceleración, referencia de ángulo, calibración manual positiva/negativa y factores de escala.
-
Modelos 3D para monitoreo de movimiento intuitivo y curvas en tiempo real con actualizaciones dinámicas.
-
Vista de datos en bruto y guardado de archivos para fácil recolección; importación de análisis de Matlab soportada.
-
Demostraciones de ROS IMU INS: visualización de seguimiento de actitud y display de datos de actitud (yaw/roll/pitch, velocidad angular, aceleración lineal).
html
Especificaciones
Interfaz &y Rendimiento
| Artículo | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interfaz / Protocolo | RS485 / Modbus | RS485 / Modbus |
| Tasa de baudios | 4,800–230,400 bps | 4,800–230,400 bps |
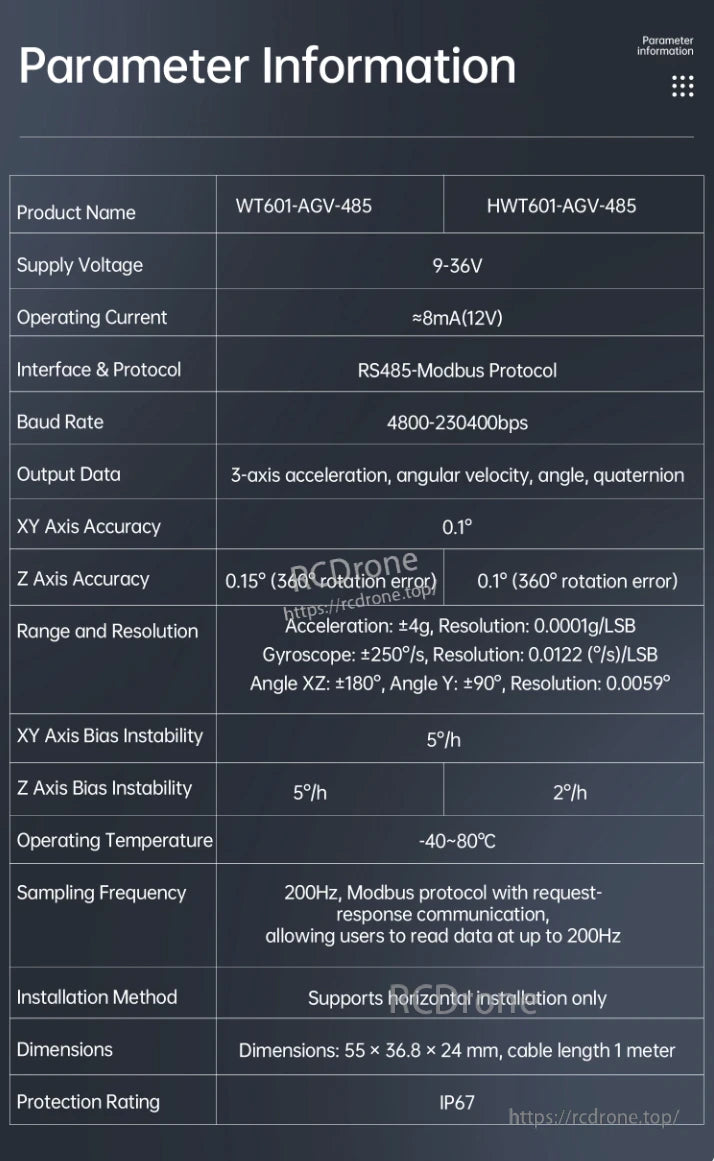
| Datos de salida | Aceleración de 3 ejes , velocidad angular, ángulo, cuaternión | Igual |
| Frecuencia de muestreo | Hasta 200 Hz (solicitud–respuesta) | Hasta 200 Hz |
| Precisión del ángulo XY | 0.1° | 0. 1° |
| Precisión del ángulo Z (error de rotación de 360°) | 0.1° | 0.15° |
| Rango de aceleración / resolución | ±4 g / 0.0001 g/LSB | Mismo |
| Rango de giro / resolución | ±250 °/s / 0.0122 (°/s)/LSB | Mismo |
| Rango de ángulo / resolución | XZ: ±180°; Y: ±90° / 0.0059° | Mismo |
| Inestabilidad de sesgo del giroscopio (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Coeficiente de temperatura (XYZ) | 0.002°/°C | 0.002°/°C |
Eléctrico, Mecánico &y Medio Ambiente
-
Tensión de suministro: 9–36 V; Corriente de funcionamiento: ≈ 8 mA (12 V)
-
Dimensiones: 55 × 36.8 × 24 mm; Longitud del cable: 1 m
-
Protección: IP67
-
Temperatura de funcionamiento: -40~80 °C (la variante de tabla también muestra -40~85 °C)
-
Instalación: Montaje horizontal solamente
-
Cascada: Hasta 32 unidades en RS485
Áreas de aplicación
AGV/AMR y robots móviles, drones/UAVs, vehículos logísticos no tripulados y módulos de percepción de conducción autónoma.
Nomenclatura de modelos &y selección
-
HWT601-AGV-485 – mayor precisión en el eje Z (0.1°) y menor inestabilidad de sesgo en Z (2°/h).
-
WT601-AGV-485 – especificaciones estándar del eje Z (0.15°, 5°/h).
Elija HWT601 cuando la precisión del rumbo Z sea crítica.
Detalles

Sensor de actitud de 6 ejes de alta precisión con aceleración de 3 ejes, velocidad angular, ángulo y cuaternión. Presenta algoritmo de rumbo AGV, protección IP67, filtrado de Kalman, adquisición automática de sesgo y soporte de software para PC.
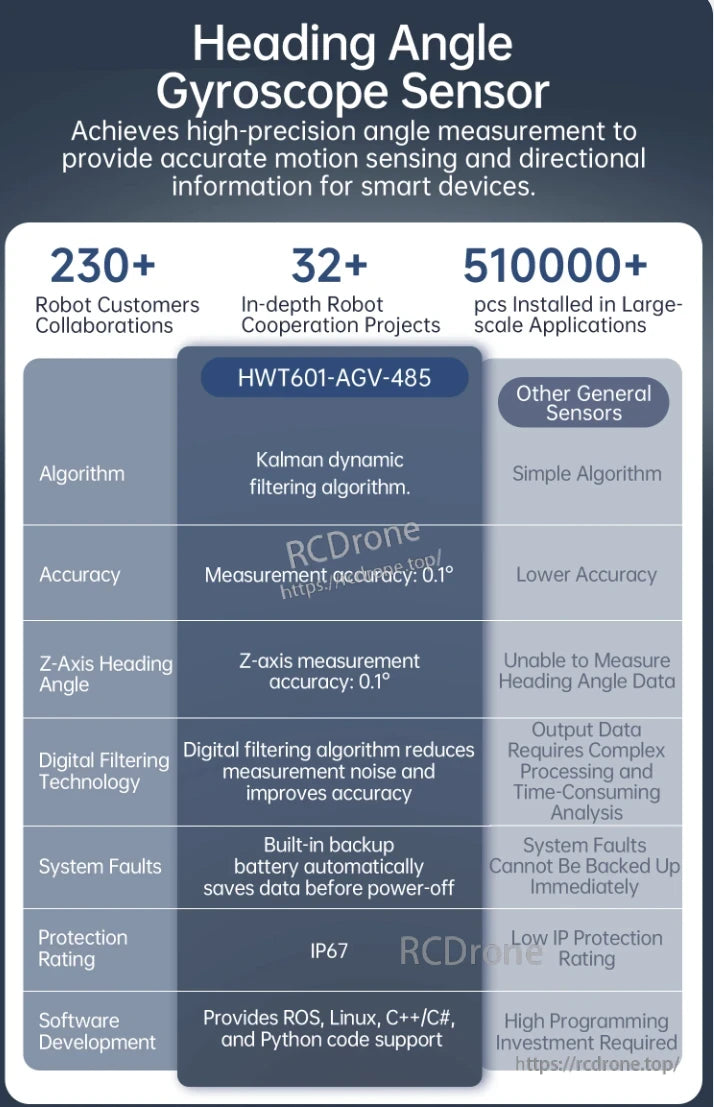
El sensor giroscópico de ángulo de rumbo HWT601-AGV-485 ofrece medición de ángulo de alta precisión con filtrado de Kalman, precisión de 0.1°, reducción de ruido digital, protección IP67 y es compatible con ROS, Linux, C++ y Python. Más de 230 colaboraciones robóticas y más de 510,000 instalaciones.
El HWT601-AGV-485 IMU ofrece un suministro de 9-36V, RS485-Modbus, muestreo a 200Hz, aceleración de ±4g, giroscopio de ±250°/s, clasificación IP67, operación de -40 a 80°C. Proporciona datos precisos y de alta resolución en 3 ejes.
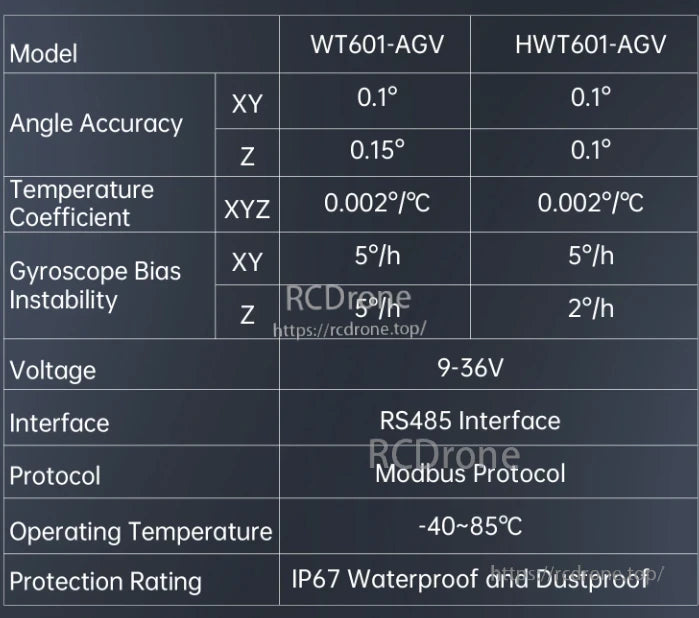
El HWT601-AGV IMU ofrece una precisión de ángulo de 0.1° en los ejes XY y Z con un coeficiente de temperatura de 0.002°/°C en los ejes XYZ. La inestabilidad del sesgo del giroscopio es de 5°/h (XY) y 2°/h (Z). Funciona con 9–36V, utiliza RS485 con Modbus y opera de -40 a 85°C. Con clasificación IP67, proporciona protección contra agua y polvo. La variante WT601-AGV tiene especificaciones similares pero con una precisión de 0.15° en el eje Z y una inestabilidad de sesgo de 5°/h en el eje Z. Ambos modelos garantizan un rendimiento confiable en entornos exigentes.
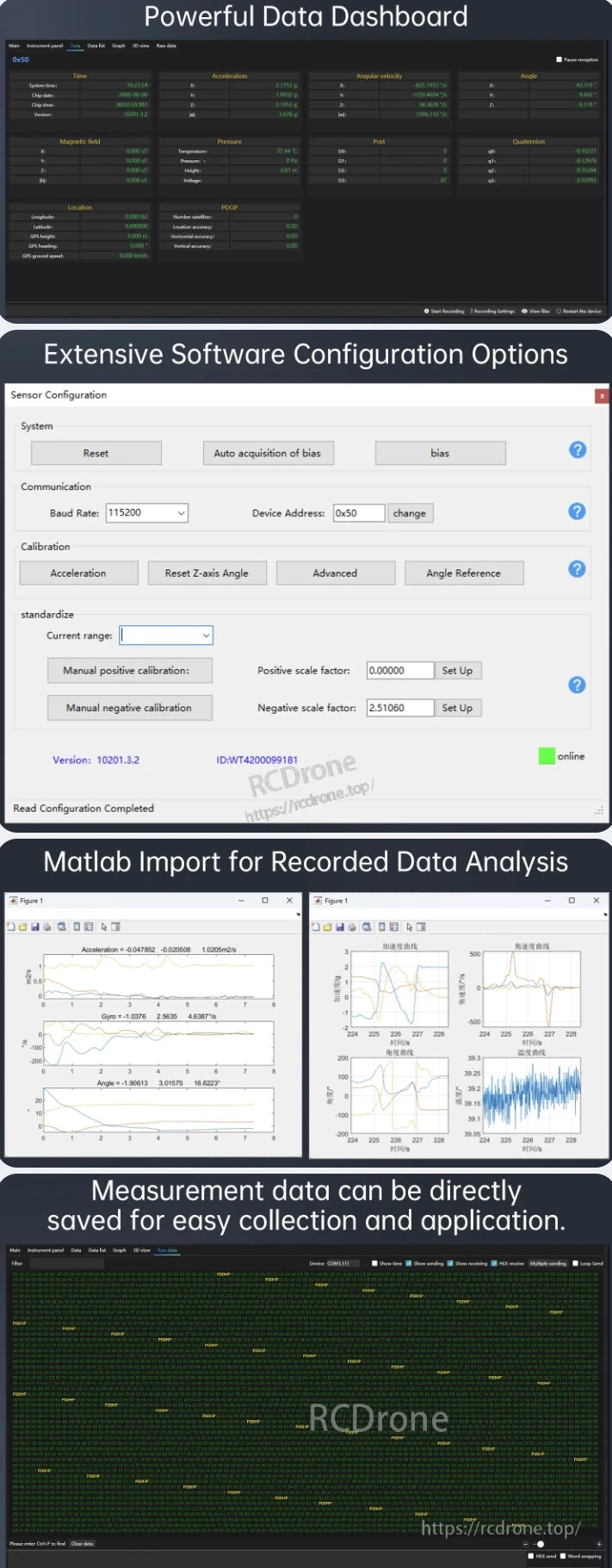
Potente panel de datos con lecturas de sensores en tiempo real, amplia configuración de software, importación de MATLAB para análisis y guardado directo de datos para una fácil recolección y aplicación.
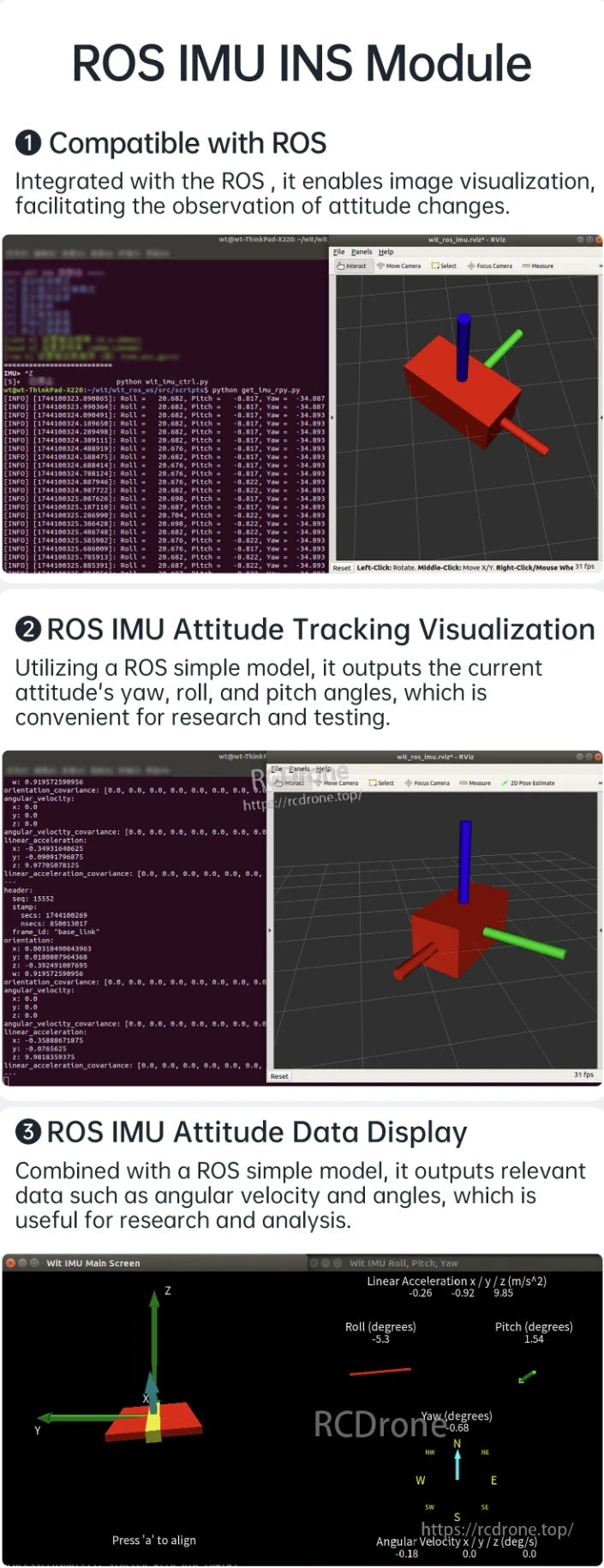
El módulo ROS IMU INS ofrece compatibilidad con ROS, visualiza el seguimiento de actitud y muestra en tiempo real el rollo, la inclinación, el guiñada, la velocidad angular y la aceleración lineal para investigación y análisis.
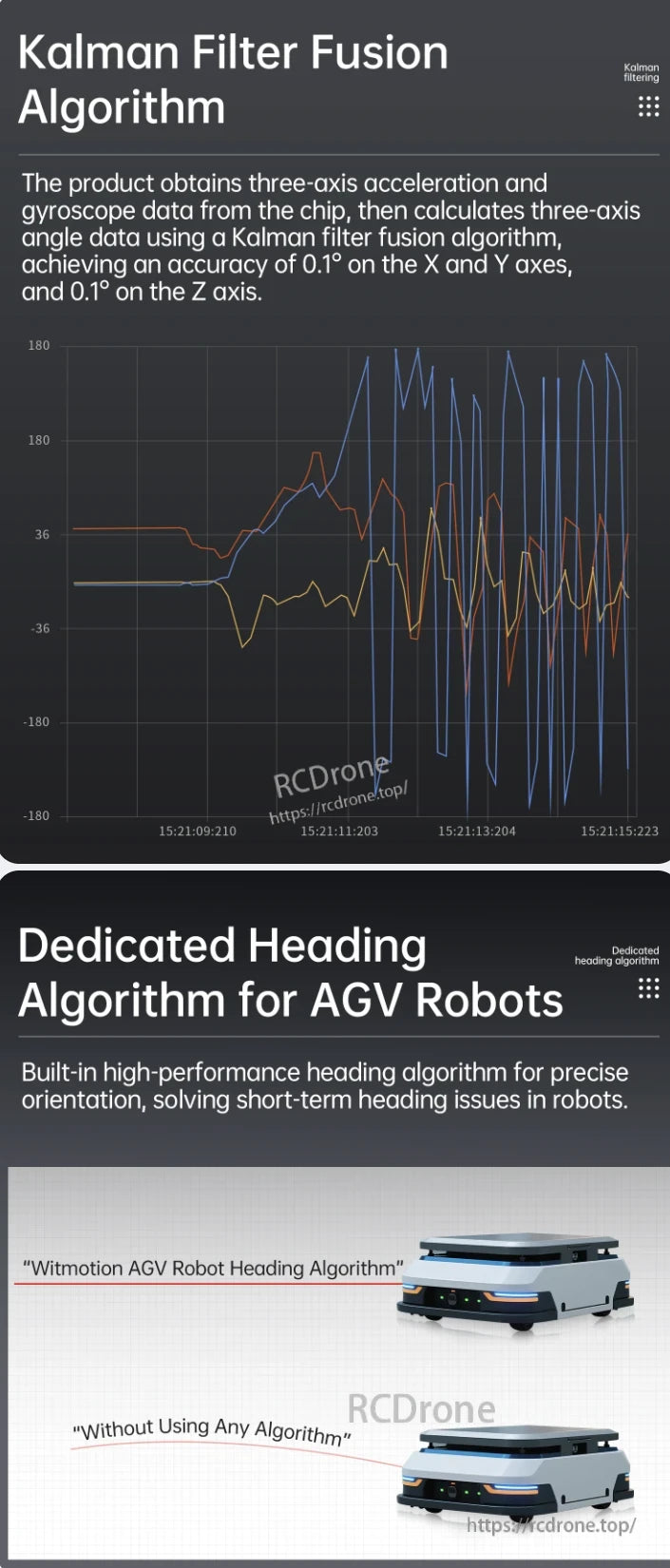
El WitMotion HWT601 AGV IMU proporciona datos de ángulo precisos en 3 ejes con una precisión de 0.1° utilizando fusión de filtro de Kalman. Su algoritmo de rumbo dedicado asegura una orientación estable del robot, mejorando significativamente el rendimiento en comparación con sistemas sin tales algoritmos.
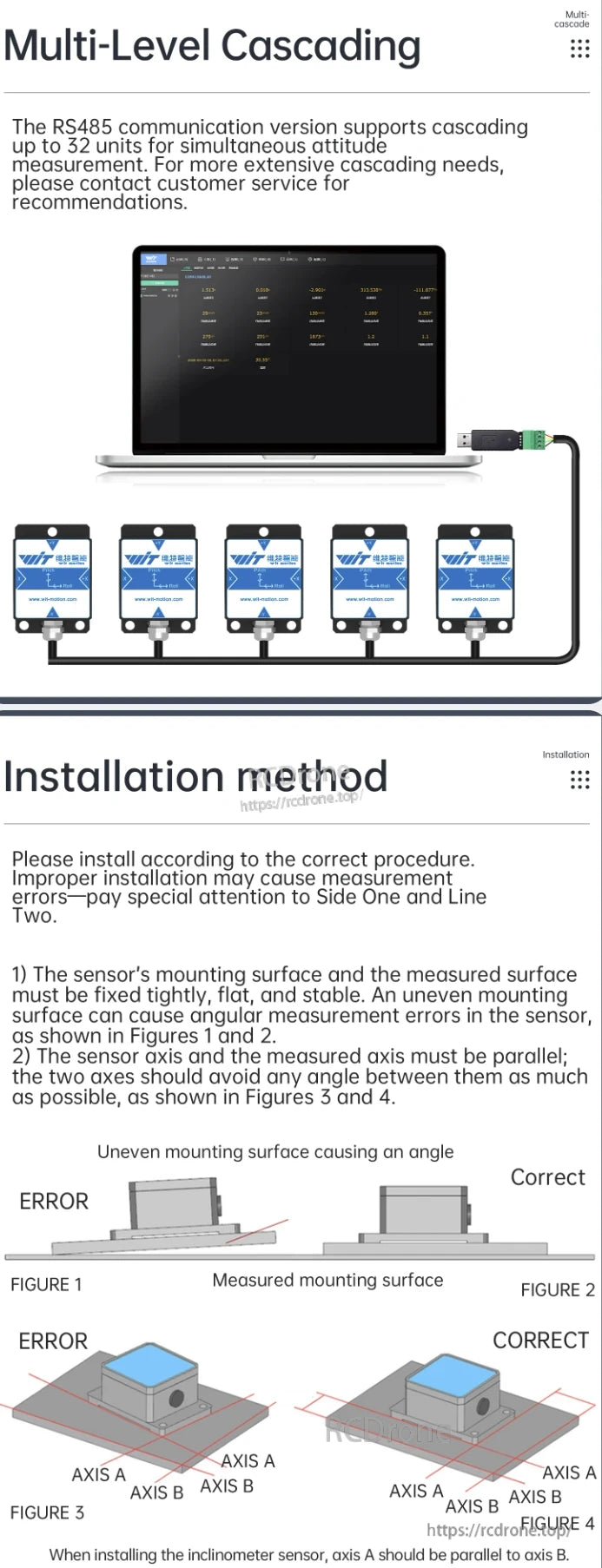
El WitMotion HWT601 AGV IMU admite hasta 32 unidades en cascada a través de RS485 para la medición de actitud. Asegúrese de un montaje plano y estable y ejes alineados para la precisión.
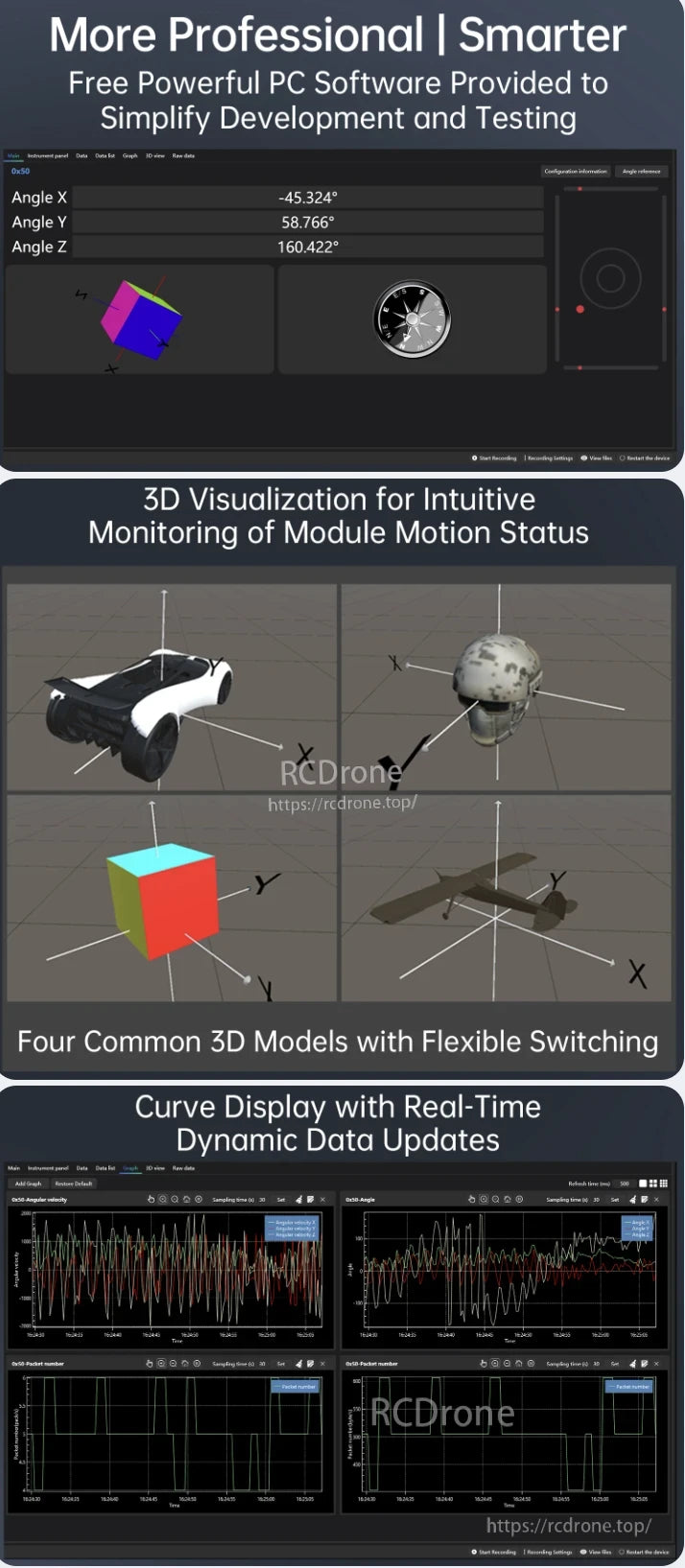
El software profesional para PC del WitMotion HWT601 AGV IMU ofrece visualización 3D en tiempo real, monitoreo de ángulos y visualización de curvas dinámicas.Las características incluyen seguimiento de movimiento intuitivo, cambio de modelo flexible y actualizaciones de datos en tiempo real para un desarrollo y pruebas eficientes.
La documentación de soporte incluye programas de ejemplo para STM32, Arduino, 51 UART, Windows C++ y Matlab para ayudar a los desarrolladores a aplicar el producto utilizando tutoriales y ejemplos de código.
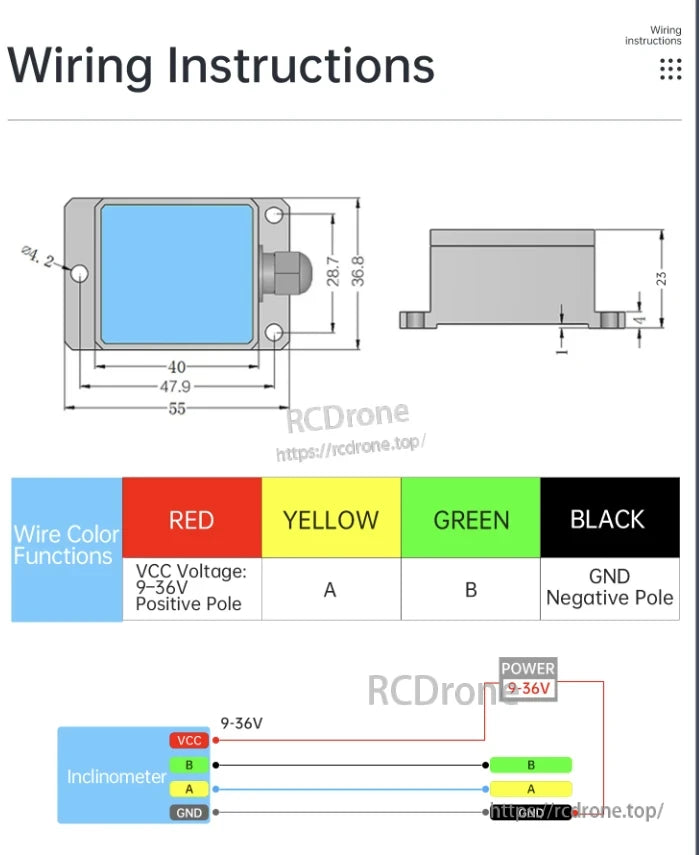
Guía de cableado del WitMotion HWT601 AGV IMU: rojo (9-36V), amarillo (A), verde (B), negro (GND). Se proporcionan dimensiones y diagrama de conexión.

WitMotion HWT601 AGV IMU para drones, conducción autónoma, robots móviles y vehículos logísticos no tripulados.
Related Collections








