WitMotion WT61 IMU (MPU6050) – Acelerómetro y giroscopio de 6 ejes con salida de ángulo, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V para Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – Acelerómetro y giroscopio de 6 ejes con salida de ángulo, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V para Arduino/Raspberry Pi/PC
WitMotion
No se pudo cargar la disponibilidad de retiro
Resumen
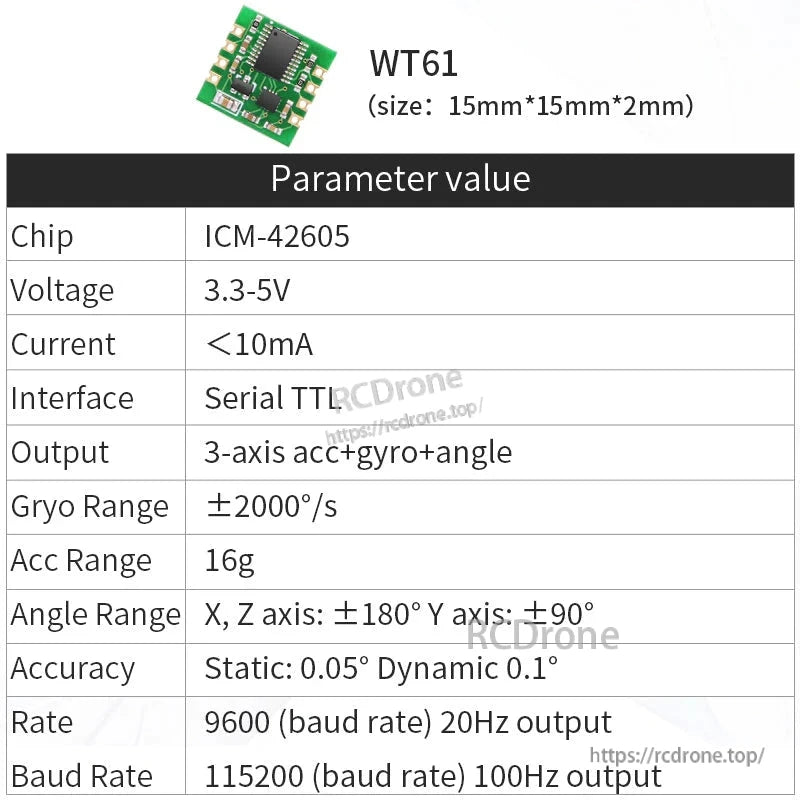
El WitMotion WT61 es un sensor de actitud MEMS de 6 ejes que proporciona salida de aceleración de 3 ejes, velocidad angular de 3 ejes y ángulo fusionado (roll/pitch/yaw). Utiliza un MCU de 48 MHz con un IMU integrado (MPU6050, según la nomenclatura del modelo) y la fusión dinámica de WitMotion + filtrado de Kalman para ofrecer alta estabilidad, bajo ruido y resultados de ángulo precisos. El módulo se comunica a través de Serial TTL y es pequeño (15.24 × 15.24 × 2 mm, ~1 g), lo que facilita su integración en dispositivos IoT, robots, maquinaria móvil, monitoreo estructural, electrónica de consumo y gadgets de VR.
Características Clave
-
3 salidas: aceleración, velocidad angular y ángulo (actitud).
-
Algoritmo de fusión: fusión dinámica + filtrado de Kalman; herencia de algoritmo de actitud de grado satelital; precisión del ángulo 0.05° (estático), 0.1° (dinámico).
-
Hardware de alta calidad: MCU de núcleo de 48 MHz, chip de potencia estable, almohadillas de cobre con inmersión en oro, sensor MEMS integrado.
-
Pequeña & luz: 15.24 × 15.24 × 2 mm, ~1 g; montaje horizontal/vertical soportado.
-
Tasas de datos seleccionables & baudios: 20 Hz / 100 Hz tasa de retorno; 9600 / 115200 bps.
-
Aplicación de Android + software de Windows: trazado en tiempo real, grabación, vista de datos en bruto, exportación a TXT, visor de demostración 3D y rica configuración (ancho de banda, tasa de salida, colocación, umbrales, sueño, reinicio del eje Z).
-
Ejemplos de SDK &: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Documentación & herramientas: hoja de datos, manual, MiniIMU.exe, controladores CH340/CP2102, videos de demostración.
-
Calidad & soporte: informe de calibración de fábrica mostrado; RoHS, CE, ISO 9001.
Especificaciones Técnicas
| Artículo | Detalles |
|---|---|
| Modelo / Marca | WT61 / WitMotion |
| Tensión de Suministro | 3.3 V ~ 5 V |
| Corriente | < 10 mA |
| Interfaz | Serial TTL |
| Contenido de salida | Aceleración de 3 ejes, velocidad angular de 3 ejes, ángulo |
| Rango de aceleración | ±2/±4/±8/±16 g (adaptativo) |
| Rango de giroscopio | ±2000 °/s |
| Rango de ángulo | X, Z: ±180°; Y: ±90° |
| Precisión del ángulo | X/Y estático 0.05°; dinámico 0.1° |
| Estabilidad (sesgo) | Acc: 0.01 g; Giro: 0.05 °/s; Ángulo (XY): 0.01° |
| Tasa de Retorno | 20 Hz / 100 Hz |
| Tasa de Baud | 9600 / 115200 bps |
| Resolución de Aceleración | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Tamaño / Peso | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Temp. de Operación | –40 °C a +85 °C |
| Definición del eje | Coordenadas cartesianas, regla de la mano derecha |
| Montaje | Horizontal o Vertical |
Pinout & Mecánico
Contorno de la placa (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Pines:
| # | Nombre | Función |
|---|---|---|
| 1 | D0 | NC reservado |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Datos en serie entrada, Nivel TTL |
| 4 | TX | Datos en serie salida, Nivel TTL |
| 5 | GND | Tierra |
| 6 | SWIM | Interfaz de datos SWIM |
| 7 | D2 | NC reservado |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC reservado |
| 10 | SDA | NC reservado |
| 11 | GND | Tierra |
| 12 | D3 | NC reservado |
Conexión del MCU (diagrama mostrado): TTL serial al MCU host con TX↔RX cruzado (VCC, TX, RX, GND).
Software, Aplicaciones & Herramientas
-
Aplicación de Android: conectar a través de USB-a-TTL + OTG del teléfono; gráficos en tiempo real para Acc/Gyro/Ángulo; Grabar botón; menú de módulos (3-ejes / 6-ejes / 9-ejes / BLE5.0 / WT901-WIFI); ricas Config páginas (calibración de acc, dirección de instalación, tasa de recuperación, ancho de banda de medición, umbral de detección estática, selección de patrón).
-
PC con Windows (MiniIMU.exe): medidores de actitud en vivo, curvas en tiempo real (“Medición de Datos Sólidos como una Roca”), Almacenamiento de Datos & Exportar (datos en bruto y analizados a estilo TXT/CSV), Menú de Configuración (baudrate 115200, modo=Serial, selección de dirección, ancho de banda e.g. , 94 Hz, sueño, restablecer el eje Z a 0°).
-
Demostración 3D: visualiza el movimiento del sensor; código fuente 3D ofrecido (como se indica).
-
Fixture de prueba: abrazadera opcional plug-and-play para cableado sin soldadura (se vende por separado).
Algoritmos & Rendimiento
-
Algoritmo WitMotion × Filtro de Kalman: derivado de Determinación de Actitud de Satélites Aeroespaciales ; combina fusión cinética, filtrado digital, estimación de estado; entrega el 0.05°/0.1° precisión angular y excelente estabilidad de sesgo/bajo ruido (gráfico y distintivos mostrados).
Aplicaciones Típicas
Dispositivos IoT, monitoreo ambiental, protección de estructuras de edificios, robótica & automatización, energía & petróleo, máquinas móviles , industria minera, electrónica de consumo, dispositivos VR.
Cumplimiento & Soporte
-
Certificados mostrados: Informe de Calibración, RoHS, CE, ISO 9001.
-
Notas de tarjeta comparativa: probado en fábrica antes del envío, SDK disponible, garantía de 12 meses, soporte técnico de por vida de WitMotion R&D.
Notas & Accesorios
-
Incluido: módulo WT61.
-
Opcional: convertidor USB-a-TTL, adaptador OTG para teléfono, fixture de prueba abrazadera.
-
Utilice la convención de coordenadas de mano derecha y siga las direcciones de instalación horizontal/vertical mostradas en el software para obtener la mejor precisión.
Detalles

WitMotion WT61 IMU proporciona una precisión de inclinación de 0.05 grados, filtrado digital, algoritmo de fusión e incluye características de aceleración, giroscopio, ángulo, vibración, MCU y filtrado.

WitMotion WT61 IMU ofrece salida de aceleración, giroscopio y ángulo en 3 ejes. Soporta 3.3V-5V, bajo consumo, TTL serie, rango adaptativo de ±2/4/8/16g, alta precisión, tamaño compacto, peso ligero y amplio rango de temperatura.

WitMotion WT61 IMU ofrece alta precisión con filtrado de Kalman, las certificaciones incluyen RoHS, CE, ISO-9001.Características: MCU de 48MHz, sensor MEMS, chip de potencia estable e interfaz de cobre sumergido en oro.

Algoritmo WitMotion x Filtro de Kalman. El algoritmo WitMotion se origina del Algoritmo de Determinación de Actitud de Satélites Aeroespaciales, combinado con filtrado de Kalman y fusión dinámica de movimiento. Precisión angular: Ejes X, Y: 0.05° (Estático), 0.1° (Dinámico). El gráfico muestra datos angulares a lo largo del tiempo, con líneas azules, rojas y amarillas que representan diferentes mediciones o salidas filtradas. Las marcas de tiempo varían de 15:21:09:210 a 15:21:15:223. El eje vertical abarca de -180 a 180 grados.

WitMotion WT61 IMU para IoT, monitoreo ambiental, robótica, automatización, minería, puentes, dispositivos de realidad virtual y aplicaciones industriales.

WitMotion IMU proporciona alta precisión, estabilidad, tamaño compacto, componentes superiores, SDK, pruebas de fábrica y soporte de por vida.Incluye filtrado de Kalman, algoritmo de fusión y una garantía de 12 meses, superando a otros.

WitMotion WT61 IMU presenta un diseño de 12 pines con VCC, GND, TX, RX, SCL, SDA, SWIM y puertos reservados; incluye detalles de tamaño en mm.

WitMotion WT61 IMU se conecta a través de un adaptador USB a OTG para la visualización y grabación de datos en smartphone. La aplicación multifuncional para Android muestra datos de sensores en tiempo real, incluyendo ángulos, aceleración y marcas de tiempo, con opciones para configuración y registro de datos.

WitMotion WT61 IMU ofrece una fácil configuración, funcionalidad plug-and-play y mediciones de actitud en tiempo real con lecturas de ángulo.

WitMotion WT61 IMU ofrece calibración, medición en tiempo real y exportación de datos. Muestra y almacena aceleración, velocidad angular, campo magnético y datos en bruto en formato TXT.

La demostración 3D muestra el movimiento del sensor de manera intuitiva. El SDK soporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino y C++/C#. Conexión serial TTL con MCU; TX y RX están cruzados.

La demostración 3D visualiza el movimiento del sensor con modelos de coche, casco, cubo y dron. El SDK soporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino y C++/C#. Conexión serial a través de TTL vincula el MCU y el módulo con TX y RX cruzados.

Las pruebas de IMU incluyen un plato giratorio de 3 ejes, barridos de vibración, extremos de temperatura, envejecimiento y evaluaciones a alta temperatura.


WitMotion WT61 IMU ofrece una tasa de retorno de 20-100Hz, voltaje de 3.3-5V y detecta aceleración, ángulo y giroscopio. Soporta interfaz TTL, compatible con Android, PC, MCU y Arduino.
Related Collections