












WitMotion WT901C-485 IMU de 9 ejes Acelerómetro Giroscopio Brújula Digital (RS485/RS232/TTL), Precisión de ángulo 0.05°, AHRS 0.2–200 Hz
WitMotion WT901C-485 IMU de 9 ejes Acelerómetro Giroscopio Brújula Digital (RS485/RS232/TTL), Precisión de ángulo 0.05°, AHRS 0.2–200 Hz
RCDrone
No se pudo cargar la disponibilidad de retiro
Resumen
El WitMotion WT901C-485 es un IMU AHRS compacto de 9 ejes basado en un conjunto de sensores de clase MPU9250 triaxial (acelerómetro + giroscopio + magnetómetro) y el algoritmo de fusión/Kalman de WitMotion. Proporciona salidas de ángulo, aceleración, velocidad angular, campo magnético y cuaternión con una precisión estática en XY de 0.05° (dinámica 0.1°) y una tasa de actualización ajustable de 0.2–200 Hz. Múltiples interfaces físicas (RS485/RS232 Modbus &y TTL UART) y amplios rangos de entrada hacen que el WT901C-485 sea fácil de integrar con Arduino/STM32/MCUs, PCs y controladores industriales. El software oficial para Windows (MiniIMU.exe) proporciona gráficos en tiempo real, demostración en 3D, registro/exportación de datos y calibración magnética visual.
Características clave
-
Salidas de 9 ejes: ángulo (Roll/Pitch/Yaw), 3 ejes acc/gyro/mag, cuaternión.
-
Alta estabilidad &y precisión: XY 0.05° estático, 0.1° dinámico; estabilidad de aceleración 0.01 g.
-
Entrada/Salida flexible: TTL / RS232 / RS485 (Modbus); baud 4,800–230,400 (predeterminado 9,600).
-
Tasa ajustable: 0.2–200 Hz (predeterminado 10 Hz).
-
Amplia alimentación: TTL 3.3–5 V, RS232/RS485 5–36 V; <25 mA típico.
-
Herramientas &y SDKs: aplicación de Windows, aplicación de Android, controladores CH340/CP2102, código de muestra para C/C++/STM32/Arduino/Matlab.
-
Calibración magnética &y demostración 3D para la configuración inicial; gráficos en vivo y exportación TXT.
-
Diseño industrial: –40~85 °C, 51×36×15 mm, montaje vertical u horizontal.
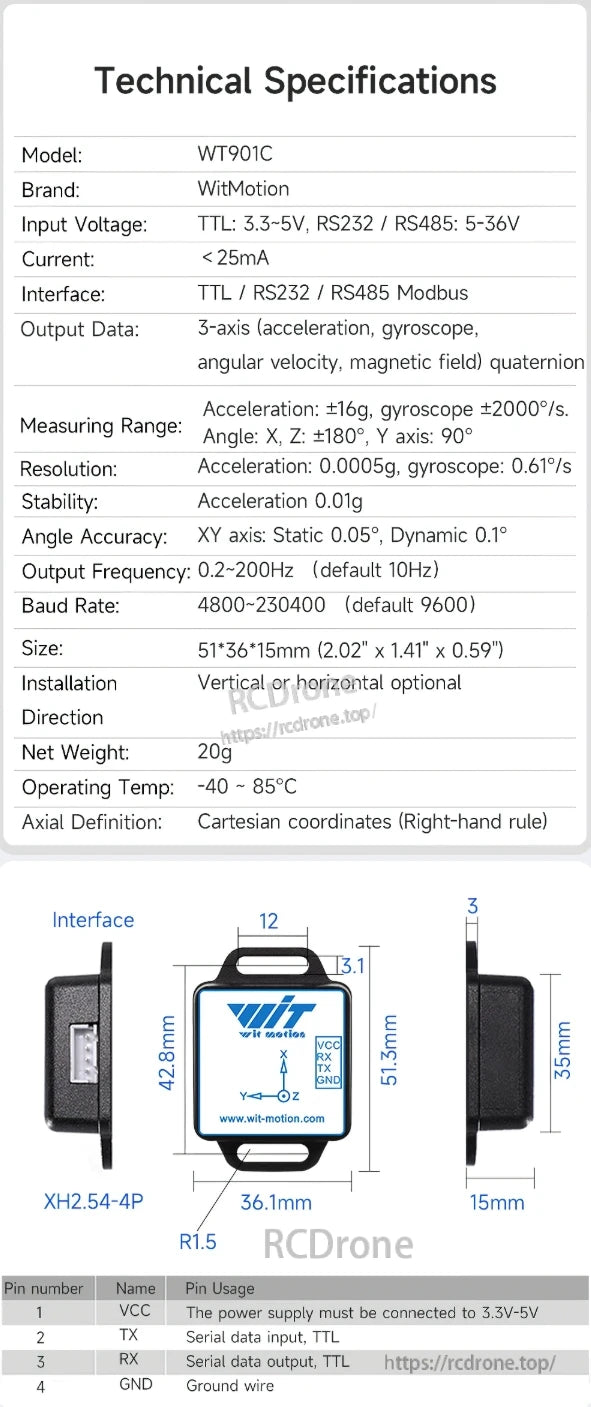
Especificaciones técnicas
| Artículo | Especificación |
|---|---|
| Modelo | WT901C (variante WT901C-485) |
| Interfaces | TTL / RS232 / RS485 (Modbus) |
| Tensión de entrada | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Corriente | < 25 mA |
| Datos de salida | Aceleración, velocidad angular, campo magnético, ángulo, cuaternión |
| Rangos de medición | Acc ±16 g, Gyro ±2000 °/s; Ángulo: X,Z ±180°, Y 90° |
| Resolución | Acc 0.0005 g, Gyro 0.61 °/s |
| Estabilidad | Aceleración 0.01 g |
| Precisión del ángulo | XY estático 0.05°, dinámico 0.1° |
| Frecuencia de salida | 0.2–200 Hz (predeterminado 10 Hz) |
| Tasa de baudios | 4,800–230,400 (predeterminado 9,600) |
| Tamaño / peso | 51×36×15 mm, 20 g |
| Temperatura de operación | –40 ~ 85 °C |
| Ejes | Cartesiano, regla de la mano derecha |
| Instalación | Vertical u horizontal |
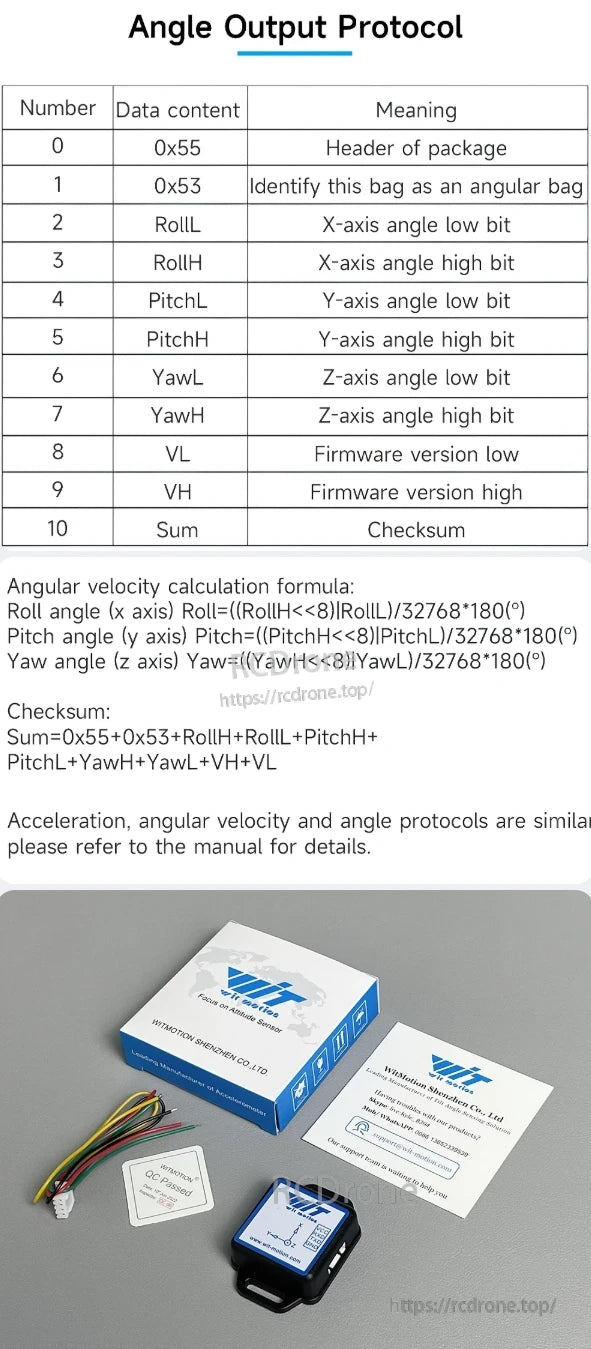
Marco de ángulo (0x55 0x53) – protocolo de salida
| Índice de byte | Contenido | Significado |
|---|---|---|
| 0 | 0x55 | Encabezado de paquete |
| 1 | 0x53 | ID de marco “Ángulo” |
| 2–3 | RollL/RollH | Ángulo del eje X (bajo/alto) |
| 4–5 | PitchL/PitchH | Ángulo del eje Y (bajo/alto) |
| 6–7 | YawL/YawH | Ángulo del eje Z (bajo/alto) |
| 8 | VL | Versión del firmware bajo |
| 9 | VH | Versión del firmware alto |
| 10 | Suma | Checksum |
Decodificación de ángulo
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Suma = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Los marcos de aceleración y velocidad angular siguen el mismo estilo de diseño—ver manual.)
Dimensiones &y Conector
Tamaño de la carcasa: 51 × 36 × 15 mm (H × W × D), con orejetas de montaje; peso ≈ 20 g.
Conector: XH2.54-4P (cabezal de placa en el sensor).
Pinout (versión TTL)
| Pin | Nombre | Descripción |
|---|---|---|
| 1 | VCC | Entrada de alimentación 3.3–5 V |
| 2 | TX | Entrada de datos en serie, nivel TTL |
| 3 | RX | Salida de datos en serie, nivel TTL |
| 4 | GND | Tierra |
Notas: Utilice niveles TTL para la integración directa con MCU. Las variantes RS232/RS485 utilizan sus respectivos niveles de voltaje y estándares de cableado.
Software &y herramientas
-
MiniIMU.exe (Windows): configuración (algoritmo, dirección de instalación, rangos, ancho de banda), gráficos en tiempo real, vista en crudo/hex, grabación de datos y exportación a TXT.
-
Demostración 3D: visualizar la orientación en tiempo real (fuente disponible).
-
Calibración magnética visual: asistente de ajuste de elipse para eliminar sesgos (recomendado para el primer uso).
-
Controladores &y código: controladores CH340/CP2102; ejemplos para STM32, Arduino, C/C++, Matlab; aplicación de Android; videos de demostración para PC/teléfono.
Aplicaciones típicas
Automatización y robótica, plataformas de nivelación, monitoreo de ángulo de inclinación, monitoreo de vibraciones, electrónica de consumo, integración de sistemas IoT, pruebas industriales, auriculares VR/AR.
Detalles

IMU AHRS rentable con una precisión de 0.05° en los ejes X Y. Presenta inclinación, vibración, y detección de actitud utilizando el Algoritmo de Fusión WitMotion. Incluye funciones de aceleración, giroscopio, ángulo, magnético, filtrado de Kalman y cuaterniones.
El sensor IMU WitMotion WT901C ofrece aceleración en 3 ejes, giroscopio, velocidad angular y detección de campo magnético. Soporta interfaces TTL/RS232/RS485, tiene un rango de aceleración de ±16g, giroscopio de ±2000°/s, precisión de ángulo estático de 0.05° y opera entre -40°C y 85°C.

El sensor IMU WitMotion WT901C ofrece automatización, auriculares VR, nivelación y monitoreo de vibraciones. Las aplicaciones incluyen electrónica de consumo, integración de IoT, pruebas industriales y AR/VR. El software gratuito proporciona mediciones de actitud fáciles de usar con datos de ángulo en tiempo real.
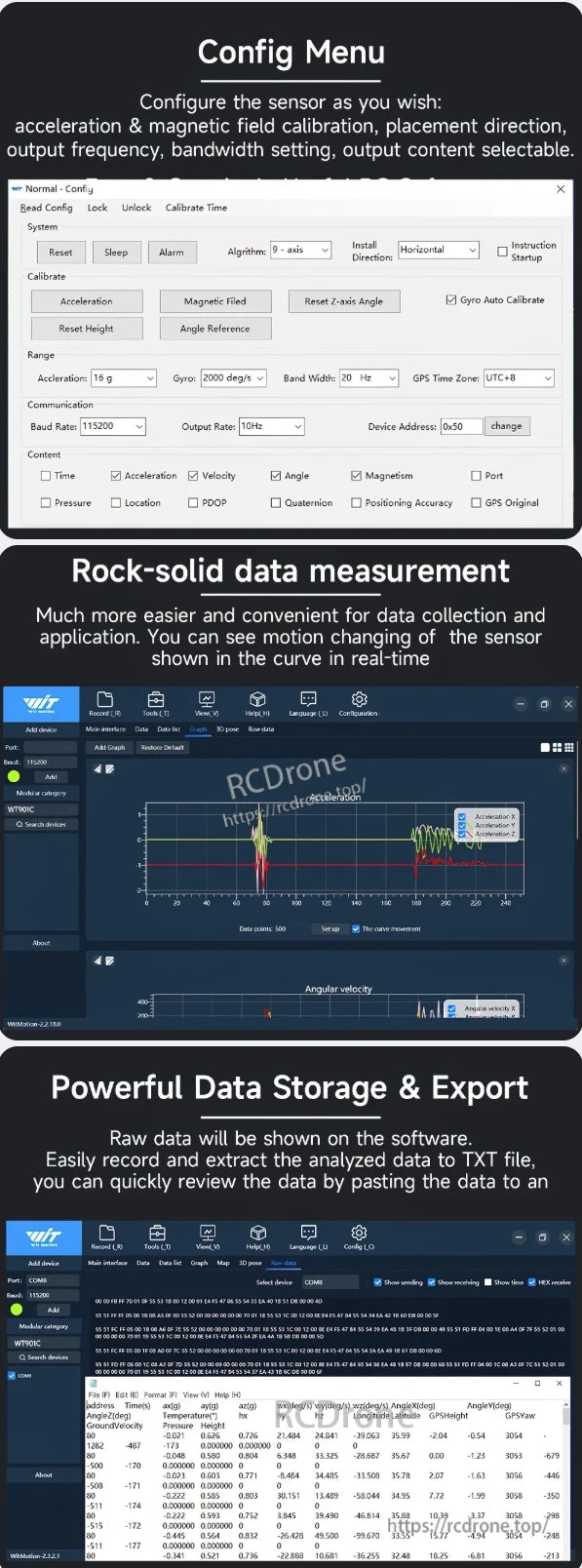
El sensor IMU WitMotion WT901C ofrece configuraciones ajustables para aceleración, campo magnético y orientación. Proporciona visualización de datos en tiempo real, mediciones robustas y soporta almacenamiento/exportación de datos en formato TXT para análisis.
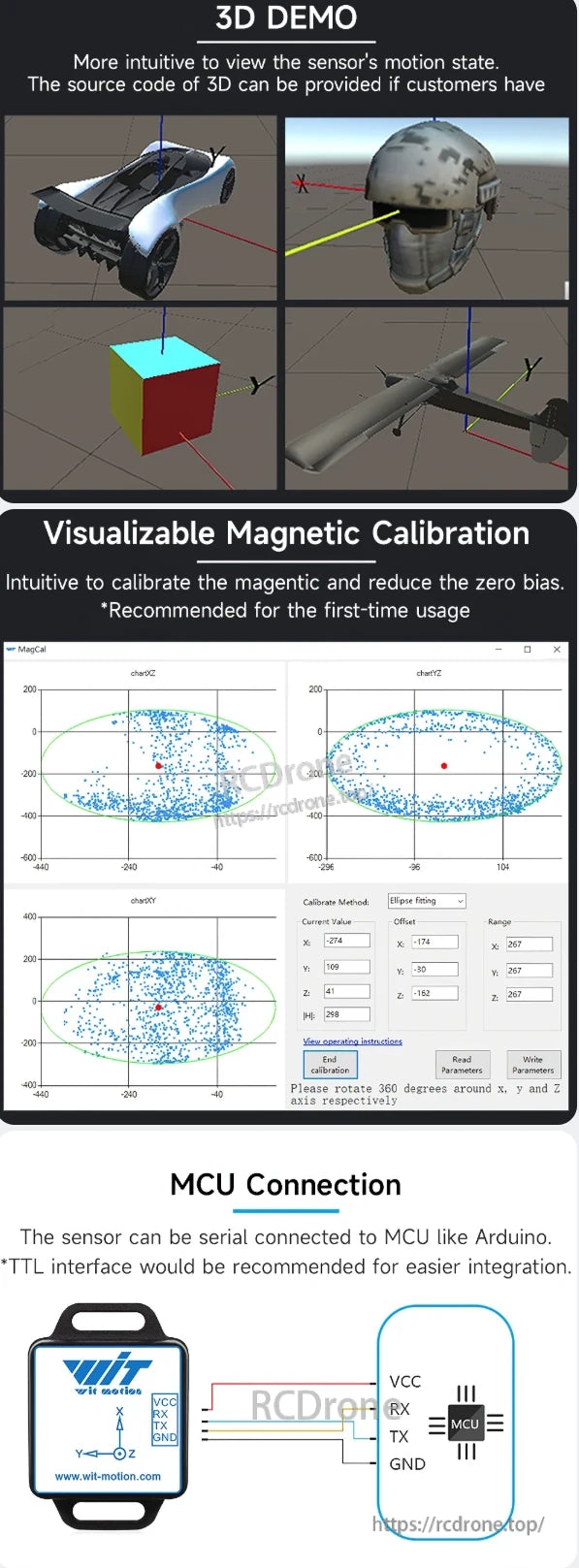
La demostración en 3D visualiza el movimiento del sensor con modelos de coche, casco, cubo y dron. La interfaz de calibración magnética permite un ajuste intuitivo. Los detalles de conexión del MCU presentan una interfaz TTL para Arduino, con pines etiquetados VCC, RX, TX, GND.

Los Kits de Desarrollo incluyen software gratuito para Windows, controladores, manuales y códigos de muestra para STM32, Arduino, C++, MATLAB. Incluye PDFs, videos de demostración y soporte de aplicación para Android para el Sensor IMU WT901C.
Detalles del protocolo de salida de ángulo del sensor IMU WT901C: estructura de datos, cálculos angulares, fórmula de verificación, empaquetado. Incluye ángulos de rollo, cabeceo, guiñada, versión del firmware y verificación.
Related Collections












