









WitMotion WT901C IMU AHRS de 9 ejes — Acelerómetro, giroscopio, magnetómetro con ángulo & cuaternión, precisión de 0.05°, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C IMU AHRS de 9 ejes — Acelerómetro, giroscopio, magnetómetro con ángulo & cuaternión, precisión de 0.05°, 0.2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
No se pudo cargar la disponibilidad de retiro
Resumen
El WitMotion WT901C es un IMU AHRS compacto de 9 ejes que fusiona un acelerómetro de 3 ejes, un giroscopio de 3 ejes y un magnetómetro de 3 ejes con el filtrado de fusión/Kalman de WitMotion para proporcionar ángulos (roll/pitch/yaw), velocidad angular, aceleración, campo magnético y cuaternión. Ofrece una precisión estática XY de 0.05° (0.1° dinámica), soporta tasas de actualización de 0.2–200 Hz y se comunica a través de TTL, RS232 o RS485 (Modbus)—ideal para mediciones de inclinación, vibración y actitud en automatización, plataformas de nivelación, VR/AR y pruebas industriales.
Características clave
-
AHRS de alta precisión: precisión estática XY 0.05°, dinámica 0.1°; ejes cartesianos de la mano derecha.
-
Amplia I/O &y voltaje: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (predeterminado 9 600).
-
Salida configurable: 0.2–200 Hz (predeterminado 10 Hz); contenido seleccionable por el usuario.
-
Datos completos de 9 ejes: Aceleración, velocidad angular, campo magnético, ángulo &y cuaternión.
-
Herramientas de visualización: Software MiniIMU para Windows con gráficos en tiempo real, registro/exportación de datos en bruto (TXT), demo de movimiento 3D, y calibración magnética visual.
-
Recursos para desarrolladores: Controladores (CH340/CP2102), manuales/fichas técnicas, código de muestra para 51/C++/STM32/Arduino/Matlab, y aplicación de Android.
-
Instalación flexible: Montaje vertical u horizontal; compacto 51 × 36 × 15 mm, ~20 g.
html
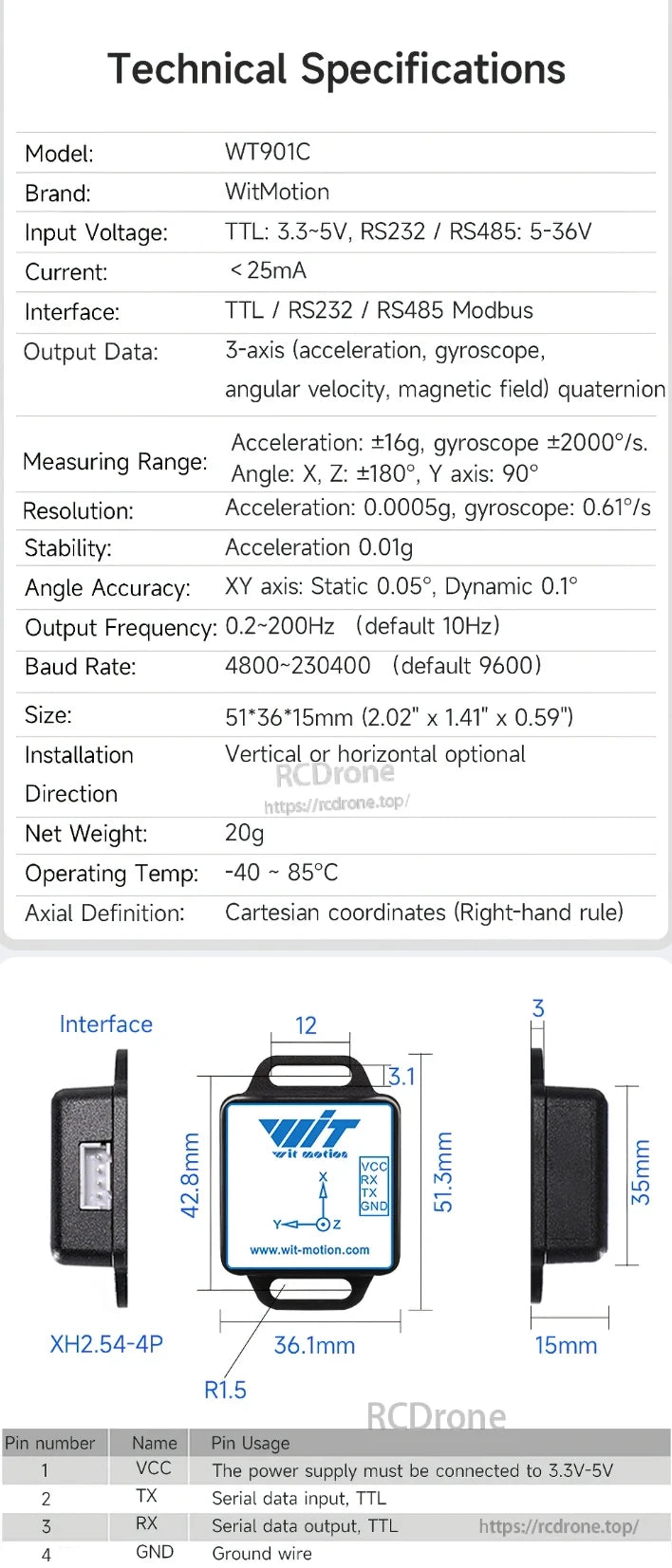
Especificaciones técnicas
-
Modelo/Marca: WT901C / WitMotion
-
Interfaces: TTL / RS232 / RS485 (Modbus)
-
Tensión de entrada: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Corriente: < 25 mA
-
Datos de salida: 3-ejes aceleración, giroscopio (velocidad angular), campo magnético, ángulo, cuaternión
-
Rango de medición: Acc ±16 g; Giro ±2000 °/s; Ángulo X,Z ±180°, Y 90°
-
Resolución: Acc 0.0005 g; Giro 0.61 °/s
-
Estabilidad: Acc 0. 01 g
-
Precisión del ángulo: XY estático 0.05°, dinámico 0.1°
-
Frecuencia de salida: 0.2–200 Hz (predeterminado 10 Hz)
-
Tasa de baudios: 4 800–230 400 (predeterminado 9 600)
-
Tamaño / Peso: 51 × 36 × 15 mm / ≈ 20 g
-
Temperatura de funcionamiento: −40 ~ 85 °C
-
Definición de ejes: coordenadas cartesianas, regla de la mano derecha
Dimensiones &y conector (versión TTL)
-
Cuerpo: 51.3 mm (H) × 36.1 mm (W) × 15 mm (D); radio de las orejas de montaje R1.5
-
Conector: XH2.54-4P
-
Pinout (izquierda→derecha en la etiqueta VCC/RX/TX/GND):
-
VCC — alimentación 3.3–5 V
-
TX — Entrada de datos en serie, TTL
-
RX — Salida de datos en serie, TTL
-
GND — tierra
-
Nota: El gráfico del eje está impreso en la carcasa (X↑, Y→, Z•), ayudando a la alineación.
Protocolo de salida de ángulo (trama 0x55 0x53)
| Byte | Contenido | Significado |
|---|---|---|
| 0 | 0x55 | Encabezado |
| 1 | 0x53 | ID de trama de ángulo |
| 2–3 | RollL/RollH | Ángulo del eje X |
| 4–5 | PitchL/PitchH | Ángulo del eje Y |
| 6–7 | YawL/YawH | Ángulo del eje Z |
| 8–9 | VL/VH | Versión del firmware (bajo/alto) |
| 10 | Suma | Checksum |
Conversión de ángulos:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Los marcos de aceleración y velocidad angular son similares; consulte el manual.)
Software &y herramientas
-
Windows (MiniIMU.exe): configuración del dispositivo (rangos, ancho de banda, tasa de salida), gráficos en tiempo real, vista de datos en bruto, visualización de pose 3D, exportar a TXT.
-
Calibración de MC: flujo de trabajo de ajuste visual de elipses para reducir el sesgo (rotar alrededor de X/Y/Z).
-
Integración de MCU: conexión serial directa; TTL recomendado para conexión simple de MCU (Arduino/STM32, etc.).
-
Recursos incluidos: Datasheet.pdf, Manual.pdf, controladores CH340 &y CP2102, código de ejemplo, Aplicación Android, videos de demostración.
Aplicaciones típicas
Automatización | Monitoreo de inclinación/nivel | Monitoreo de vibraciones | Plataformas de nivelación | Integración de sistemas IoT | Pruebas industriales | auriculares VR/AR | Electrónica de consumo.
Detalles

IMU AHRS rentable con una precisión de 0.05° en los ejes X e Y. Presenta inclinación, vibración y detección de actitud utilizando el Algoritmo de Fusión WitMotion. Incluye aceleración, giroscopio, ángulo, magnético, filtrado de Kalman y funciones de cuaterniones.
El IMU WitMotion WT901C ofrece detección de 3 ejes con aceleración, giroscopio y magnetómetro. Proporciona salida de cuaterniones. Soporta TTL, RS232, RS485. Mide ±16g, ±2000°/s, ángulos de ±180°. Tamaño compacto de 51×36×15mm. Funciona de -40 a 85°C.

El IMU WitMotion WT901C soporta automatización, cascos de VR, nivelación y monitoreo de vibraciones. Funciona para electrónica de consumo, IoT, pruebas industriales y AR/VR. Viene con software gratuito para la visualización de datos de ángulo en tiempo real.

El menú de configuración del IMU WitMotion WT901C permite la calibración del sensor, la configuración de salida de datos y la visualización de movimiento en tiempo real. Soporta un algoritmo de 9 ejes, aceleración ajustable, giroscopio, ancho de banda y zona horaria GPS. Gráficas en tiempo real muestran la aceleración y la velocidad angular para mediciones precisas.
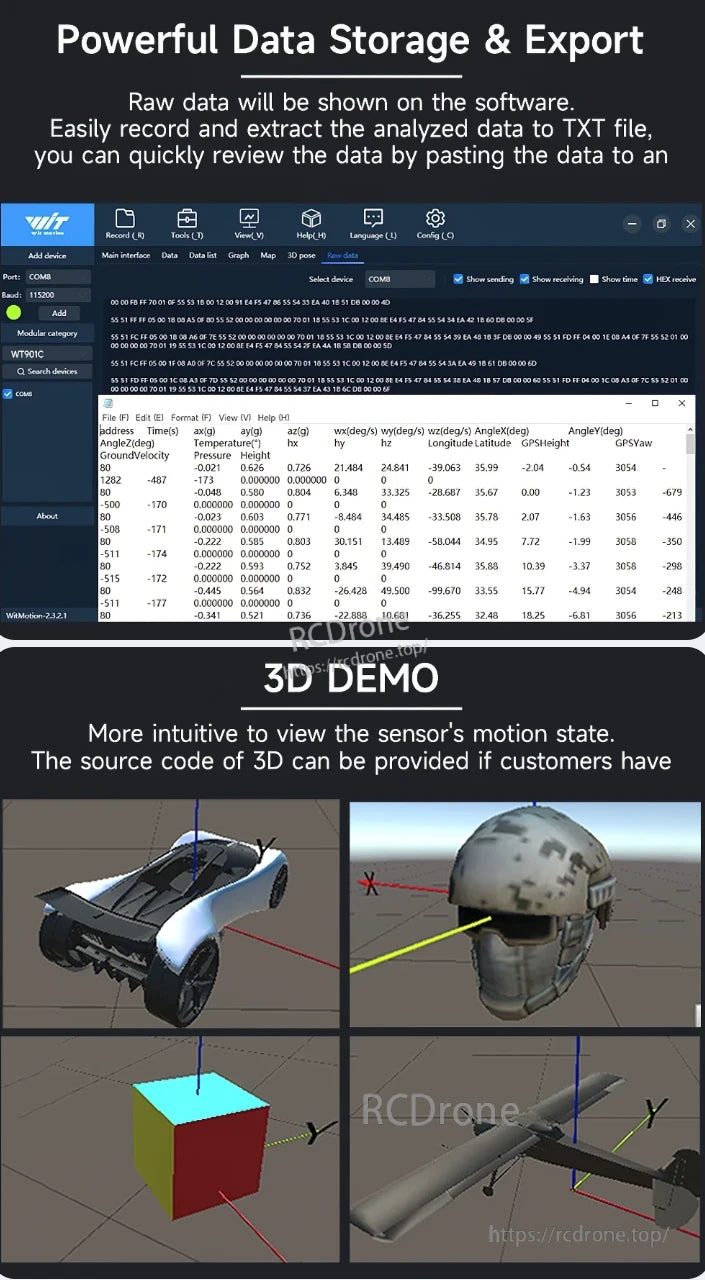
El WitMotion WT901C IMU ofrece un potente almacenamiento de datos, fácil exportación a TXT y visualización de movimiento en 3D con código fuente disponible.
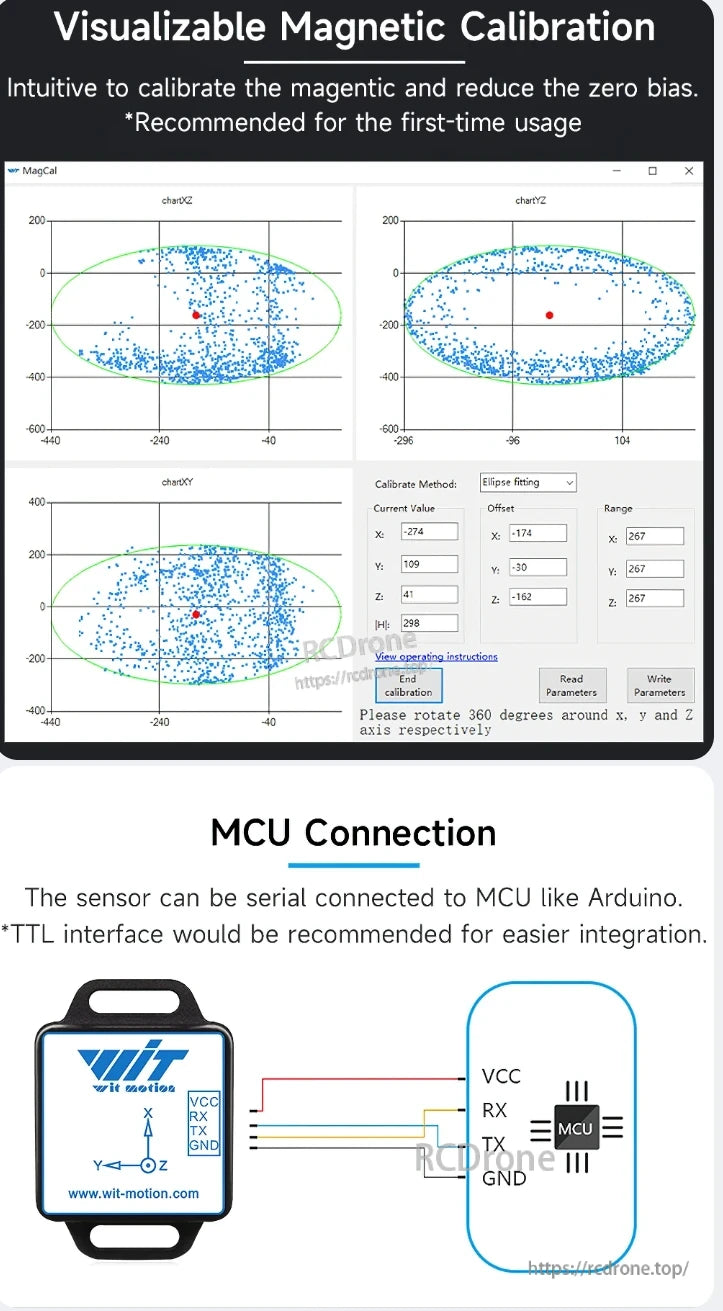
Calibración magnética visualizable para el IMU WT901C con método de ajuste de elipse. Se recomienda la conexión del MCU a través de la interfaz TTL. El sensor se conecta a MCUs similares a Arduino utilizando los pines VCC, RX, TX, GND.
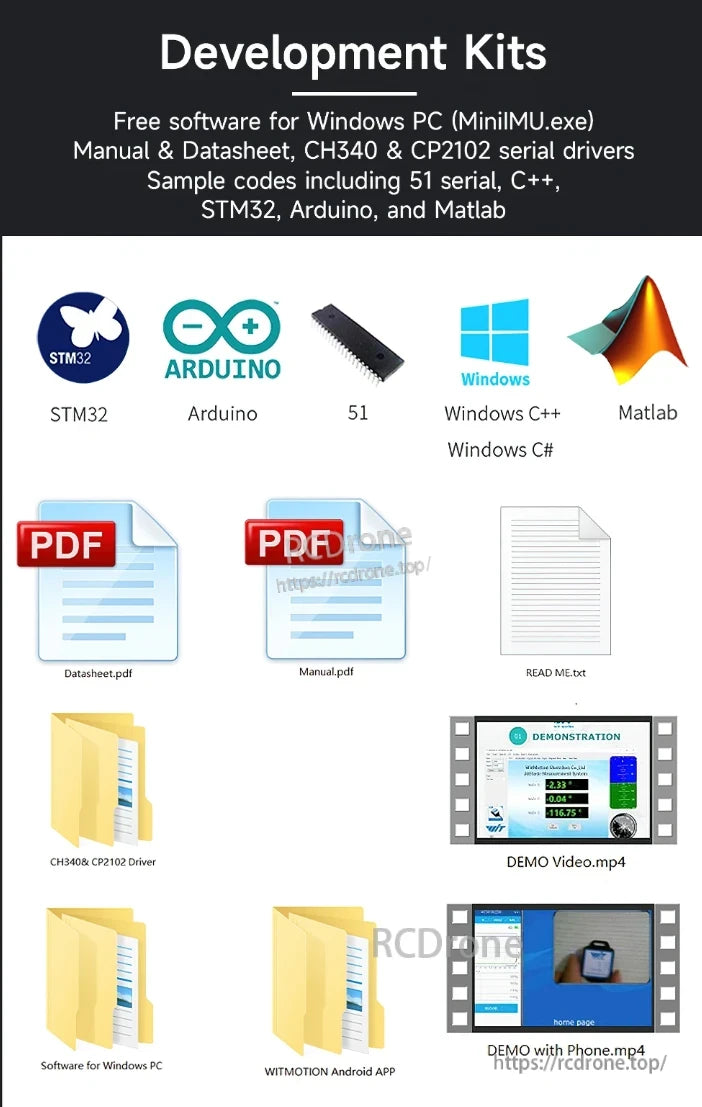
Los Kits de Desarrollo incluyen software gratuito para Windows, manual, hoja de datos, controladores CH340 &y CP2102, códigos de muestra para 51, C++, STM32, Arduino y Matlab, junto con videos de demostración y una aplicación para Android.
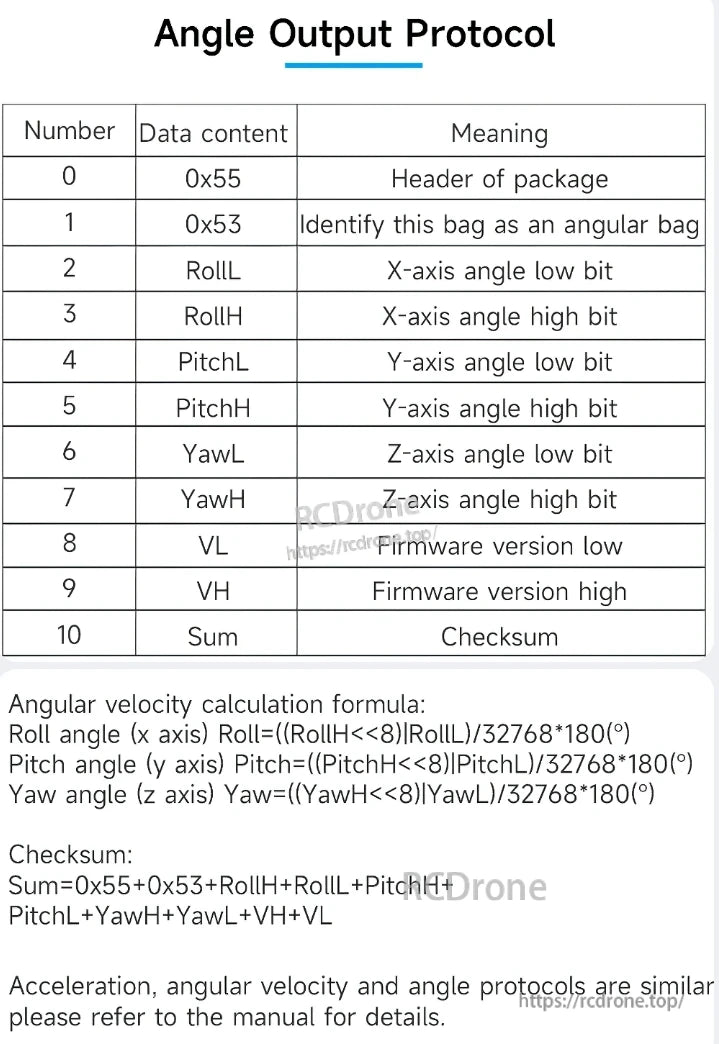
La estructura de datos para la salida de ángulo del IMU WT901C incluye encabezado, rollo, inclinación, guiñada, versión del firmware y suma de verificación. Se proporcionan fórmulas para cálculos y verificación. Estructuras similares existen para aceleración y velocidad angular.
Related Collections









