





WitMotion WTGAHRS3 Sensor de Ángulo IMU-AHRS/INS de 6 Ejes GPS, Acelerómetro Giroscopio, RS485/TTL, Beidou+GPS, IP67, Filtro Kalman
WitMotion WTGAHRS3 Sensor de Ángulo IMU-AHRS/INS de 6 Ejes GPS, Acelerómetro Giroscopio, RS485/TTL, Beidou+GPS, IP67, Filtro Kalman
WitMotion
No se pudo cargar la disponibilidad de retiro
Resumen
WTGAHRS3 es un sensor de actitud de navegación inercial profesional que fusiona un IMU de 6 ejes con posicionamiento satelital de alta precisión. Integra un acelerómetro, giroscopio y solucionador de actitud con filtrado de Kalman para una salida de ángulo estable y de alta precisión, y (en versiones GPS) informa la latitud/longitud y la velocidad sobre el terreno. La carcasa es de aluminio con protección contra polvo/agua IP67, una interfaz de antena externa y un cable blindado para una robusta integridad de señal. Se proporciona software para PC y código de muestra (Windows C/C#, STM32, 51, MATLAB) para una rápida integración.
Rendimiento básico
-
Precisión de actitud: estática 0.05°, dinámica 0.1° (especificaciones de la serie)
-
Rango de IMU: aceleración ±16 g; giroscopio ±500 °/s; rango de ángulo ±180°
-
Salidas: tiempo, aceleración, velocidad angular, ángulo de Euler; las versiones GPS añaden latitud, longitud, velocidad sobre el terreno
-
Filtros/algoritmos: filtrado digital, filtro de Kalman, estimación cinética/estado
-
Navegación: GPS + BeiDou (BDS) incorporado con recepción de múltiples constelaciones opcional y navegación inercial de alta precisión en interiores (fusión de IMU)
-
Carcasa: aluminio, IP67; puerto de antena externa; cable de malla blindada
Gama de modelos &y interfaces de datos
-
WTGAHRS3-TTL/232 — Nivel TTL/RS-232 en serie, IMU de alta tasa + fusión de rumbo; rumbo preciso incluso sin GPS.
-
WTGAHRS3-485 — Interfaz industrial RS485, protocolo MODBUS; integra datos de IMU para posicionamiento inercial puro.
-
WTGAHRS3-GPS — Añade GNSS de múltiples constelaciones (BDS/GPS/GLONASS/Galileo/QZSS/SBAS) para salida de latitud/longitud y velocidad en tierra.
Especificaciones
Especificaciones generales de IMU (aplica a todos los modelos)
| Artículo | Especificación |
|---|---|
| Ejes medidos | 3-ejes Acc, 3-ejes Gyro, Ángulo |
| Rango de medición | Acc ±16 g; Gyro ±500 °/s; Ángulo ±180° |
| Precisión del ángulo | XY: 0.2°, Z: 0.5° |
| Contenido de salida | Tiempo, aceleración, giroscopio, ángulo de Euler (los modelos GPS también proporcionan latitud/longitud y velocidad sobre el terreno) |
| Peso | 83.76 g |
| Longitud del cable | 1 m |
Parámetros WTGAHRS3-TTL/232
| Artículo | Especificación |
|---|---|
| Interfaz | Puerto serie (nivel TTL/232) |
| Tasa de baudios | 4,800 ~ 921,600 bps |
Parámetros WTGAHRS3-485
| Artículo | Especificación |
|---|---|
| Tensión de suministro | 5–36 V |
| Corriente | < 50 mA |
| Tasa de baudios | 115,200 bps (configurable 4,800 ~ 460,800) |
| Tasa de actualización | 1 Hz |
| Temperatura de funcionamiento | −30 ~ +85 °C |
| Interfaz de datos | RS485 |
| Protocolo | MODBUS |
Parámetros WTGAHRS3-GPS (GNSS)
| Artículo | Especificación |
|---|---|
| Constelaciones | BDS/GPS/GLONASS/GALILEO/QZSS/SBAS |
| Canales RF | RF de 3 canales, soporta recepción de constelación completa |
| TTFF (frío/caliente/recaptura) | ≤32 s / ≤1 s / ≤1 s |
| sensibilidad | Frío −148 dBm; Caliente −156 dBm; Recaptura −160 dBm; Seguimiento −162 dBm |
| Precisión de posición | < 2.5 m (CEP50) |
| Precisión de velocidad | < 0.1 m/s (1σ) |
| Actualización de posicionamiento | 1/2/5/10 Hz (predeterminado 1 Hz) |
| Protocolo | NMEA 0183 |
| Altitud / velocidad máxima | 18,000 m / 515 m/s |
| Poder GNSS típico | < 29 mA @ 3.3 V |
| Temperatura de operación / almacenamiento | −40 ~ +85 °C / −45 ~ +125 °C |
Mecánico &y conector
| Artículo | Especificación |
|---|---|
| Dimensiones | ~40 mm × 34 mm cuerpo |
| Montaje | Diámetro del agujero 3 mm, separación de agujeros 32 mm |
| Ancho de la placa frontal | 26 mm (referencia) |
| Pines etiquetados | VCC / RXD / TXD / GND |
| Antena | Puerto de antena externa (modelos GNSS) |
| Enclosure | Aluminio, IP67, resistente al polvo/agua/impactos |
| Cable | Cable con funda apantallada (anti-interferencia) |
Software &y desarrollo
-
Software para PC con Windows: panel de control, registro de datos, visualización de curvas, visualización de modelos 3D, configuración.
-
Recursos: Guía del usuario, controlador de puerto serie, software para PC, programas de muestra para STM32, 51, Windows C/C#, MATLAB.
Aplicaciones típicas
-
Robots móviles, AGVs/AMRs, vehículos industriales, plataformas marinas
-
UAVs, estabilizadores, apuntado de antenas, carritos de mapeo
-
Navegación inercial subterránea/interior (RS485/TTL) y navegación exterior asistida por GNSS (modelo GPS)
Detalles
Sensor de navegación inercial de seis ejes con GPS y Beidou, que cuenta con sensores de aceleración, giroscopio, ángulo, longitud, dimensión y velocidad en tierra.

Alta precisión y estabilidad con filtrado de Kalman, filtrado digital y estimación de estado. Soporta China Beidou y U.S. GPS para posicionamiento preciso, medición de longitud, latitud y velocidad en tierra.
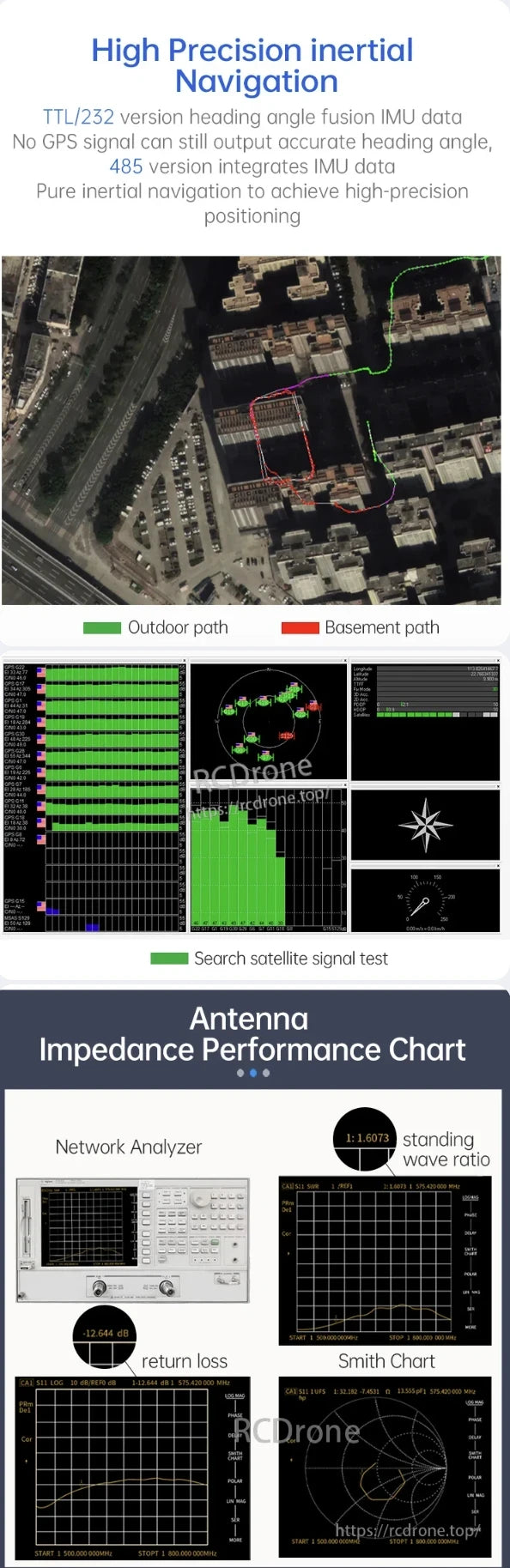
Navegación inercial de alta precisión con fusión de datos IMU, lo que permite una dirección precisa sin GPS. Presenta rendimiento de impedancia de antena, resultados de analizador de red, pérdida de retorno, relación de onda estacionaria y gráfico de Smith para la integridad de la señal.
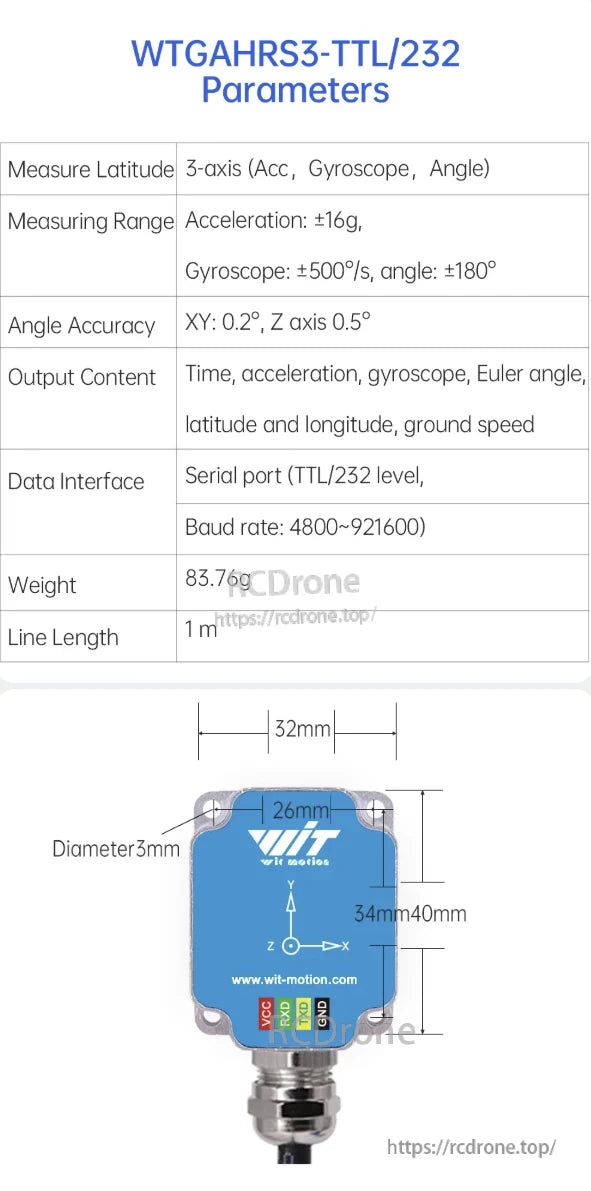
WitMotion WTGAHRS3-TTL/232 El sensor AHRS ofrece medición de 3 ejes con aceleración de ±16g, giroscopio de ±500°/s, rango de ángulo de ±180°. Proporciona tiempo, aceleración, giroscopio, ángulos de Euler, latitud, longitud, velocidad en tierra a través de TTL/232. Pesa 83.76g, dimensiones 40×34×26mm, longitud de línea de 1m.

Los sensores WitMotion WTGAHRS3-485 y WTGAHRS3-GPS cuentan con un amplio rango de voltaje de entrada, bajo consumo de energía y posicionamiento GPS/BD de alta precisión. Soportan múltiples sistemas de satélites, rápido TTFF y protocolos RS485/MODBUS/NMEA0183 para un rendimiento confiable en temperaturas extremas.

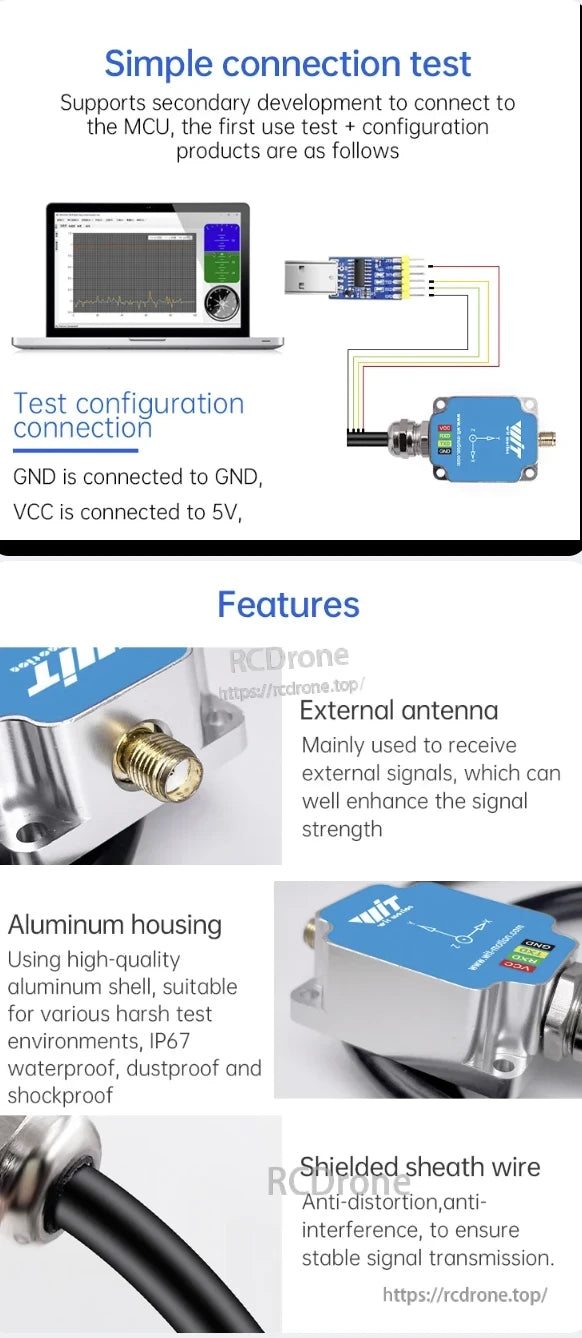
El sensor AHRS WitMotion WTGAHRS3 tiene una antena externa, una carcasa de aluminio con protección IP67, cable apantallado y soporta conexión MCU para pruebas fáciles.
Related Collections





