



























DOFBOT Pro Brazo Robótico 6-DOF con Visión 3D de Profundidad para Jetson Nano 4GB / Orin Nano SUPER / Orin NX SUPER
DOFBOT Pro Brazo Robótico 6-DOF con Visión 3D de Profundidad para Jetson Nano 4GB / Orin Nano SUPER / Orin NX SUPER
Yahboom
No se pudo cargar la disponibilidad de retiro
Resumen
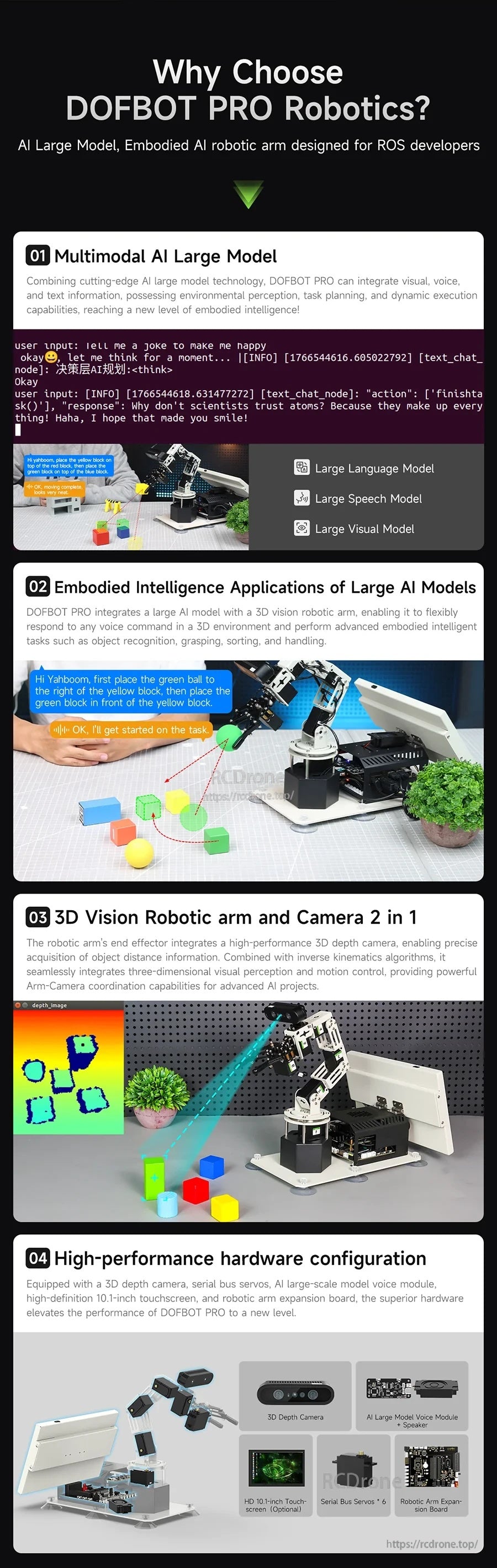
DOFBOT PRO es un brazo robótico de nivel de escritorio con visión 3D AI diseñado para la educación y el desarrollo en ROS. Combina una estructura de articulación de movimiento de 6-DOF, una cámara de profundidad 3D y placas de control de la serie NVIDIA Jetson para simplificar el control de movimiento complejo a través de ROS, cinemática directa/inversa y percepción visual para el reconocimiento, seguimiento y agarre en el espacio 3D.
Videos
Características clave
- Compatibilidad con la plataforma Jetson: compatible con las placas de control Jetson Nano 4GB / Jetson Orin Nano SUPER / Jetson Orin NX SUPER; se admite el entrenamiento de modelos acelerado por GPU y el desarrollo en Python.
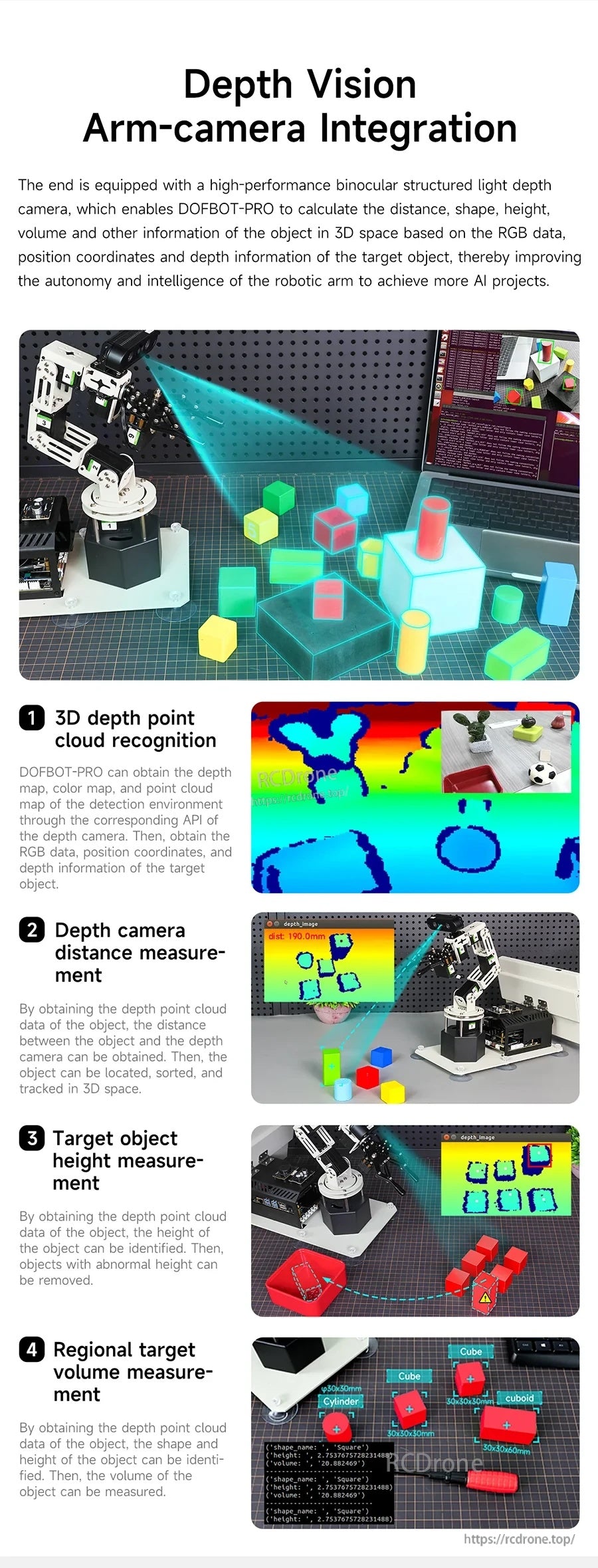
- Reconocimiento de nubes de puntos de profundidad 3D: detección de fusión RGB + profundidad (RGB+D) para tareas de posicionamiento, seguimiento y agarre en 3D.
- Planificación y simulación de movimiento en ROS: admite la planificación de movimiento MoveIt y la simulación de robots RViz; admite interacción visual en 2D y 3D.
- Estructura de aleación de aluminio de 6 grados de libertad: cuerpo de aleación de aluminio mecanizado con precisión; servos de alta precisión para un movimiento suave en múltiples ejes.
- Control multiplataforma: soporta control por aplicación (Android/iOS), control inalámbrico por manija y control por página web en PC.
- Conceptos multimodales / de gran modelo (según lo proporcionado): Modelo de Lenguaje Grande, Modelo de Voz Grande, Modelo Visual Grande; incluye Base de Conocimiento RAG Escalable y descripciones de “Arquitectura de Razonamiento Dinámico de Doble Modalidad”.
- Marcos de algoritmos listados: algoritmo de cinemática inversa, YOLOv11, OpenCV, MediaPipe.
Para selección de productos y soporte técnico, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Especificaciones
DOFBOT-PRO (sistema de brazo robótico)
| Control maestro | Jetson Nano B01 / Jetson Orin Nano SUPER / Jetson Orin NX SUPER |
|---|---|
| Grados de libertad | 6 |
| Envergadura del brazo | 350mm |
| Abre-cierra del gripper | 6cm |
| Precisión de posicionamiento repetible | ±0.5mm |
| Tipo de estructura | Estructura de brazo robótico tradicional |
| Cámara | Cámara de profundidad DABAI DCW2 Cámara de profundidad |
| Dimensión visual | Imagen 3D con información de distancia de profundidad |
| Voz | Módulo de voz de modelo grande de IA + altavoz |
| Display | 10.1-pulgada pantalla |
| Función | Control de interconexión; Planificación de movimiento MoveIt; Simulación de robot RViz; Interacción visual 2D; Interacción visual 3D; Modelo grande de IA |
| Posicionamiento (como se describe) | IA embebida / Modelo grande de IA / Brazo robótico visual de profundidad 3D |
Configuraciones del Brazo Robótico ROS (como se enumeran)
| Versión | Versión Estándar | Versión Ultimate |
|---|---|---|
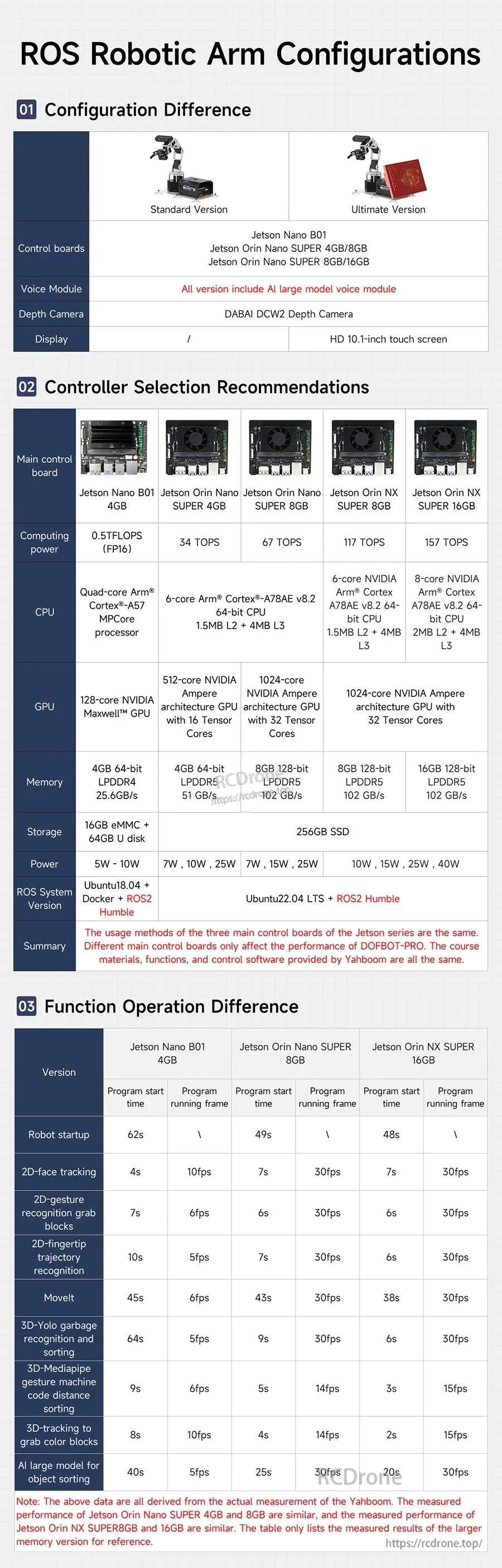
| Placas de control | Jetson Nano B01; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin Nano SUPER 8GB/16GB | Jetson Nano B01; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin Nano SUPER 8GB/16GB |
| Módulo de Voz | Todas las versiones incluyen módulo de voz de modelo grande de IA | |
| Cámara de Profundidad | DABAI DCW2 Cámara de Profundidad | |
| Pantalla | / | HD 10.1-pulgada pantalla táctil |
Recomendaciones de selección de controladores (especificaciones de la placa Jetson mostradas)
| Artículo | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|---|---|
| Potencia de cálculo | 0.5TFLOPS (FP16) | 34 TOPS | 67 TOPS | 117 TOPS | 157 TOPS |
| CPU | Procesador Quad-core Arm Cortex-A57 MPCore | CPU de 6 núcleos Arm Cortex-A78AE v8.2 de 64 bits; 1.5MB L2 + 4MB L3 | CPU de 6 núcleos Arm Cortex-A78AE v8.2 de 64 bits; 1.5MB L2 + 4MB L3 | CPU de 6 núcleos NVIDIA Arm Cortex A78AE v8.2 de 64 bits; 1.5MB L2 + 4MB L3 | CPU de 8 núcleos NVIDIA Arm Cortex A78AE v8.2 CPU de 64 bits; 2MB L2 + 4MB L3 |
| GPU | GPU NVIDIA Maxwell de 128 núcleos | GPU de arquitectura NVIDIA Ampere de 512 núcleos con 16 núcleos Tensor | GPU de arquitectura NVIDIA Ampere de 1024 núcleos con 32 núcleos Tensor | GPU de arquitectura NVIDIA Ampere de 1024 núcleos con 32 núcleos Tensor | GPU de arquitectura NVIDIA Ampere de 1024 núcleos con 32 núcleos Tensor |
| Memoria | 4GB LPDDR4 de 64 bits; 25.6GB/s | 4GB 64-bit LPDDR5; 51GB/s | 8GB 128-bit LPDDR5; 102GB/s | 8GB 128-bit LPDDR5; 102GB/s | 16GB 128-bit LPDDR5; 102GB/s |
| Almacenamiento | 16GB eMMC + 64GB U disk | 256GB SSD | |||
| Poder | 5W - 10W | 7W , 10W , 25W | 7W , 15W , 25W | 10W , 15W , 25W , 40W | 10W , 15W , 25W , 40W |
| Versión del sistema ROS | Ubuntu18.04 + Docker + ROS2 Humble | Ubuntu22.04 LTS + ROS2 Humble | |||
Diferencia de operación de función (resultados medidos mostrados)
| Versión | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|
| Inicio del robot (tiempo de inicio del programa) | 62s | 49s | 48s |
| Seguimiento de cara 2D (tiempo de inicio del programa / fotogramas en ejecución del programa) | 4s / 10fps | 7s / 30fps | 7s / 30fps |
| Reconocimiento de gestos 2D bloquea (tiempo de inicio del programa / fotogramas en ejecución del programa) | 7s / 6fps | 6s / 30fps | 6s / 30fps |
| Reconocimiento de trayectoria de punta de dedo 2D (tiempo de inicio del programa / fotogramas en ejecución del programa) | 10s / 5fps | 7s / 30fps | 6s / 30fps |
| MoveIt (hora de inicio del programa / fotograma en ejecución del programa) | 45s / 6fps | 43s / 30fps | 38s / 30fps |
| Reconocimiento y clasificación de basura 3D-Yolo (hora de inicio del programa / fotograma en ejecución del programa) | 64s / 5fps | 9s / 30fps | 6s / 30fps |
| Código de máquina de gestos 3D-Mediapipe clasificación por distancia (hora de inicio del programa / fotograma en ejecución del programa) | 9s / 6fps | 5s / 14fps | 3s / 15fps |
| Seguimiento 3D para agarrar bloques de color (hora de inicio del programa / fotograma en ejecución del programa) | 8s / 10fps | 4s / 14fps | 2s / 15fps |
| Modelo grande de IA para clasificación de objetos (hora de inicio del programa / fotograma en ejecución del programa) | 40s / 5fps | 25s / 30fps | 20s / 30fps |
Aplicaciones
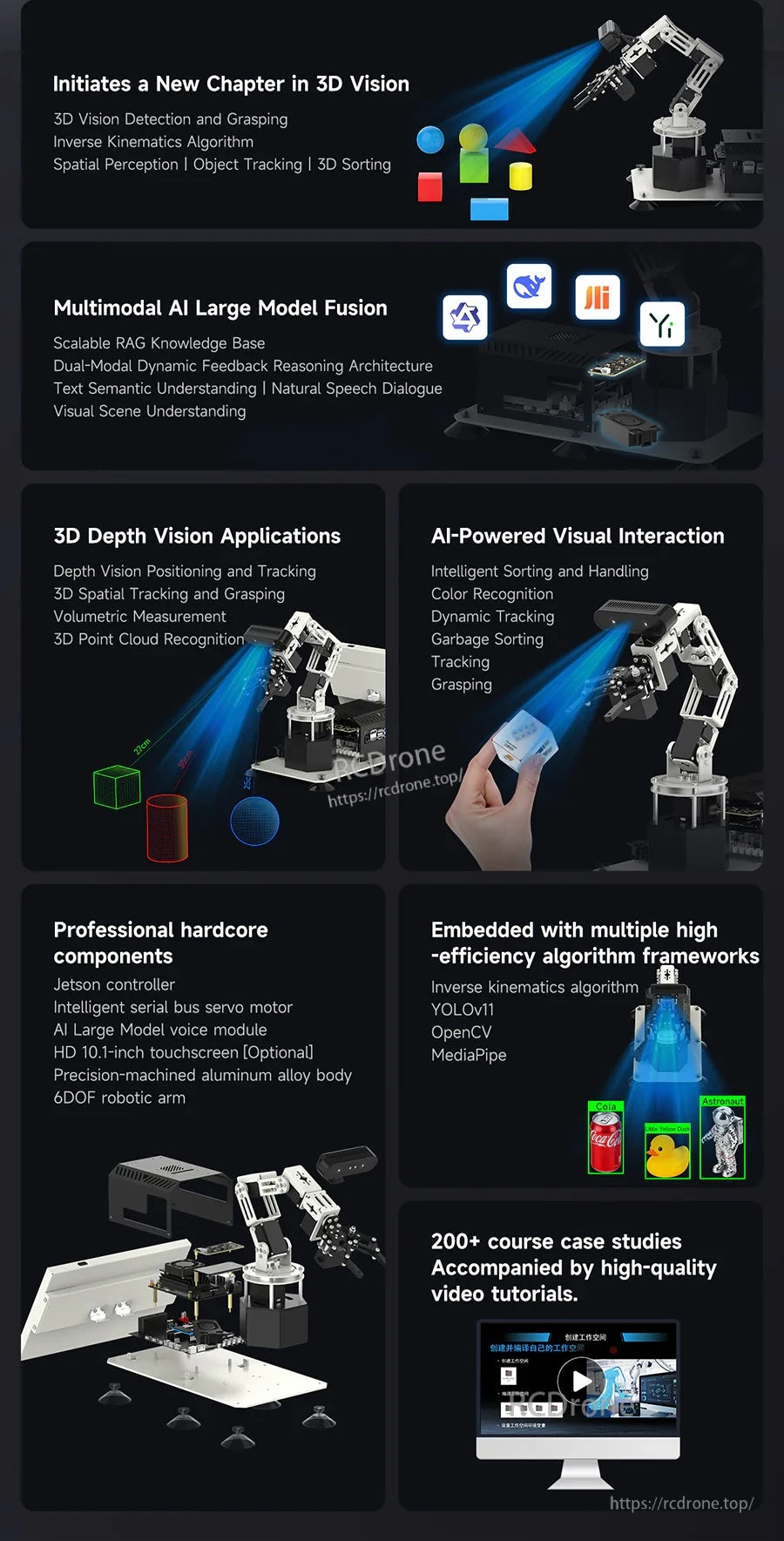
- Detección y agarre de visión 3D; percepción espacial; seguimiento de objetos; clasificación 3D
- Medición de profundidad (medición de distancia), reconocimiento de formas, medición de altura, medición de volumen
- Posicionamiento y seguimiento de visión de profundidad; seguimiento y agarre espacial 3D; reconocimiento de nubes de puntos 3D
- Interacción visual impulsada por IA: clasificación y manejo inteligentes, reconocimiento de colores, seguimiento dinámico, clasificación de basura, seguimiento, agarre
- Flujos de trabajo multimodales descritos: análisis de video, control de movimiento de comando largo, clasificación de altura anormal, inferencia de intención (base de conocimientos RAG), algoritmo de seguimiento de objetos KCF, tareas de reconocimiento basadas en YOLOv11
Dimensiones de ejemplo de objetos mostradas para demostraciones de medición volumétrica: Cubo de 30*30*30mm, Cilindro de 30*30*30mm, Cilindro de 30*30*60mm.Ejemplos de superposiciones de distancia mostradas incluyen 240.0mm y 190.0mm.
Manuales
Enlace del tutorial: http://www.yahboom.net/study/DOFBOT-Pro
Detalles
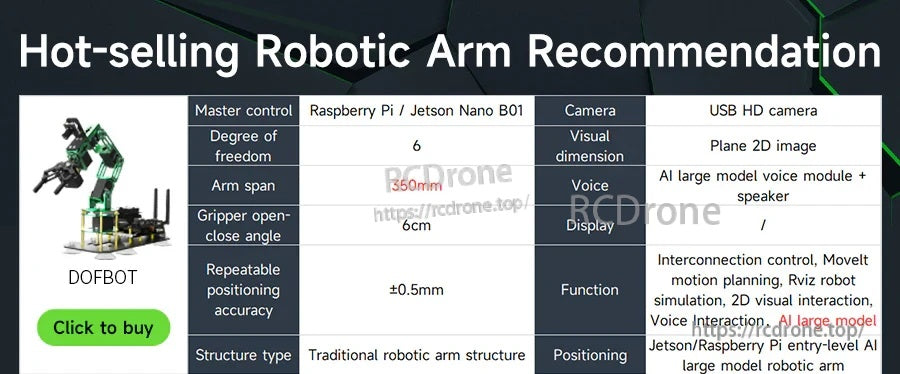
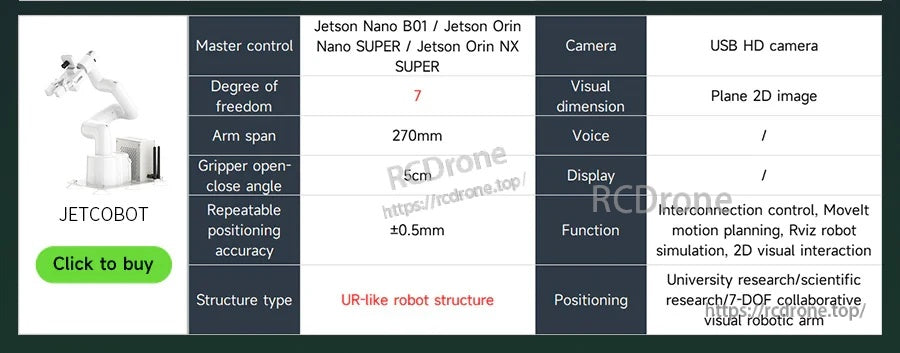
Compara opciones populares de brazos robóticos de escritorio de un vistazo, incluyendo grados de libertad, alcance, rango de agarre y plataformas de control.
Un rápido resumen de especificaciones ayuda a elegir el modelo adecuado para el aprendizaje de ROS, simulación y tareas básicas de visión.
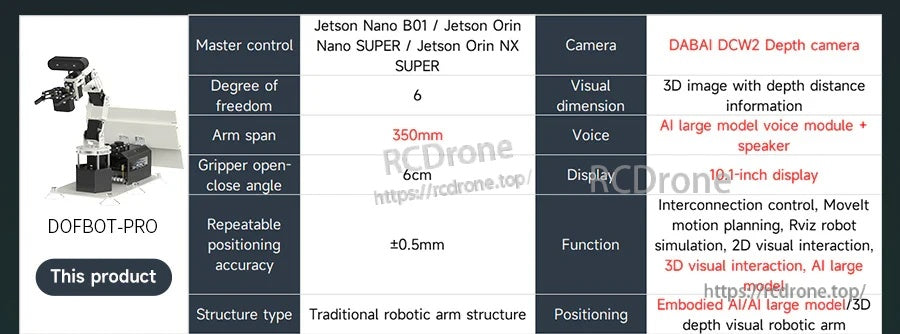
DOFBOT-PRO combina un brazo de 6-DOF, detección de profundidad RGB+D y compatibilidad con Jetson para el desarrollo de percepción 3D y agarre.
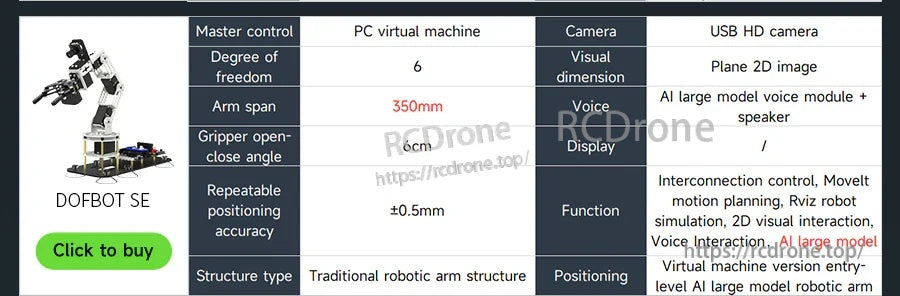
Se proporcionan detalles de configuración alternativa para usuarios que necesitan una estructura de brazo y configuración de cámara diferentes.
Construido para la educación y el desarrollo de ROS, el kit combina un brazo compacto de 6-DOF con visión de profundidad y una configuración integrada estilo escritorio.

Diseñado para flujos de trabajo de planificación de movimiento y percepción, como cinemática, reconocimiento de objetivos, seguimiento y agarre en el espacio 3D.
Los módulos clave cubren la percepción de profundidad, conceptos de interacción de IA y marcos de software utilizados en tuberías robóticas comunes.
Los aspectos destacados de hardware y software resumen lo que se incluye para construir demostraciones de visión + ROS y experimentos en el aula.

Múltiples opciones de placas Jetson ayudan a escalar desde prototipos de nivel básico hasta cargas de trabajo de IA de mayor rendimiento.
Utilice la matriz de configuración para hacer coincidir la placa del controlador y el conjunto de características con los requisitos de su proyecto ROS.

La visión de profundidad añade comprensión consciente de la distancia para un posicionamiento, reconocimiento y planificación de agarre más confiables que el 2D solo.
La calibración de la cámara del brazo admite tareas como el reconocimiento de nubes de puntos y la medición basada en profundidad para la interacción en el espacio 3D.
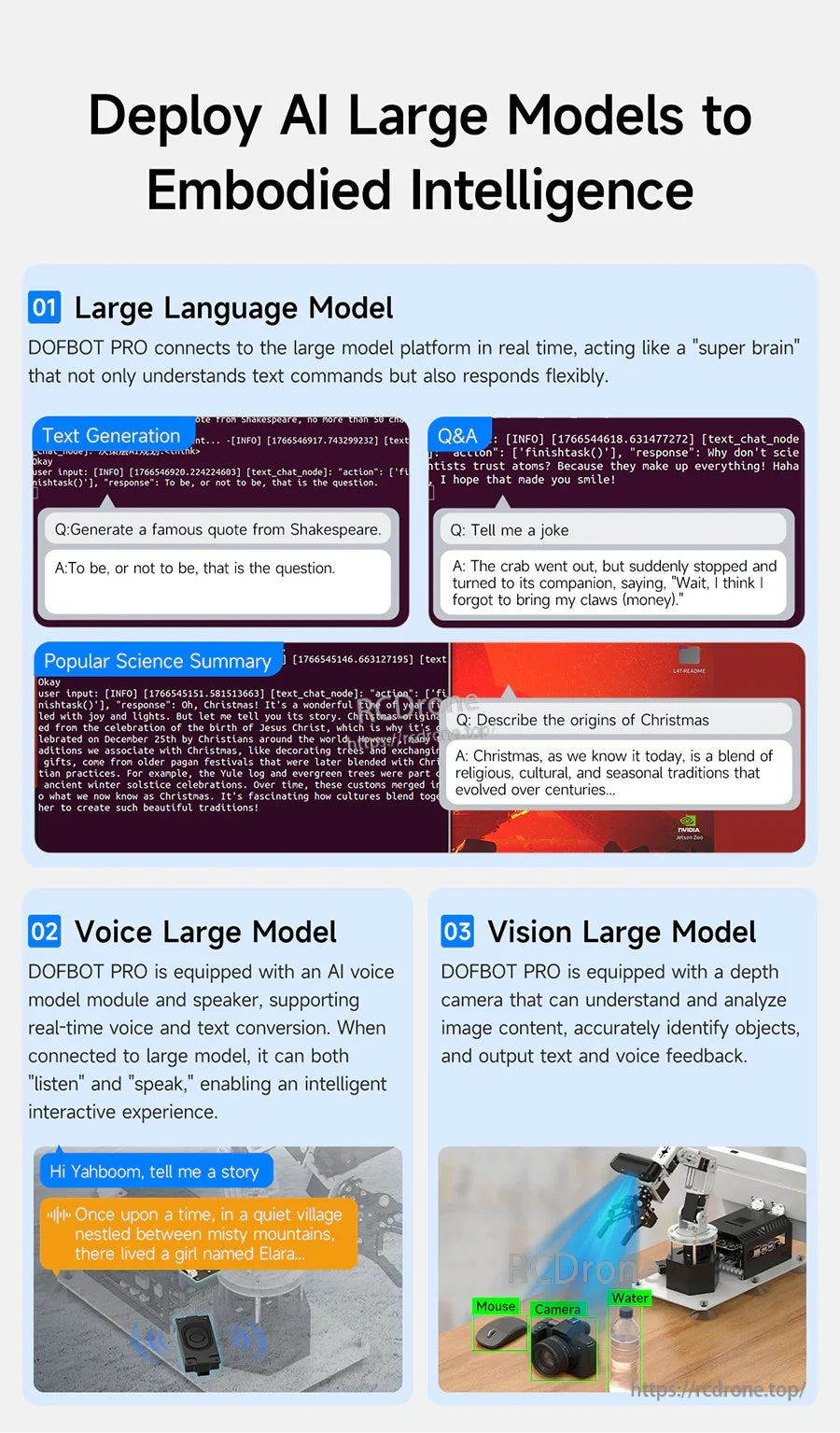
Los conceptos de interacción multimodal incluyen capacidades de texto, voz y visión para construir flujos de trabajo más ricos entre humanos y robots.

Los ejemplos de aplicación se centran en comportamientos de clasificación y manipulación que combinan percepción con control basado en comandos.

Las demostraciones prácticas muestran tareas de seguimiento, clasificación y selección de acciones construidas en torno a la lógica de visión e interacción.
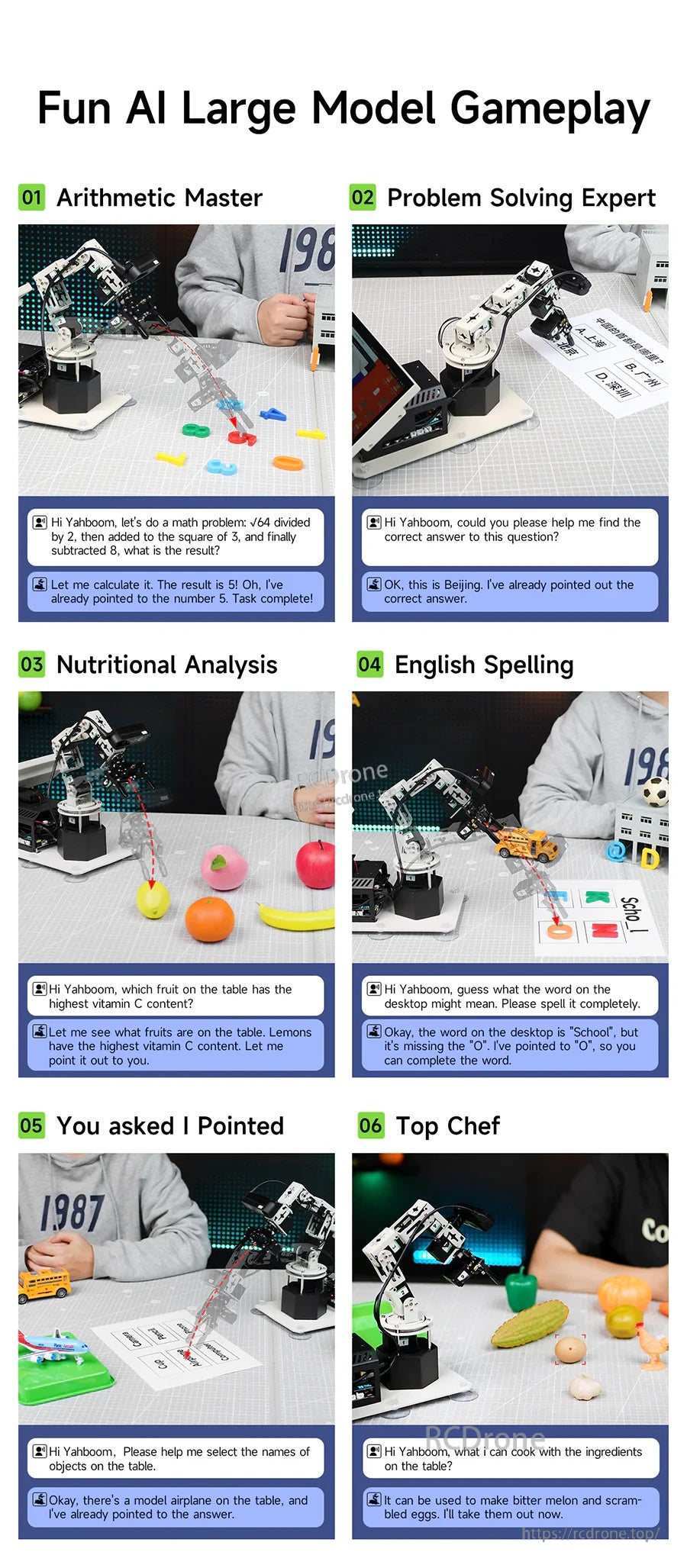
Las actividades interactivas de estilo desafío proporcionan escenarios accesibles para probar la percepción, el razonamiento y los bucles de control.
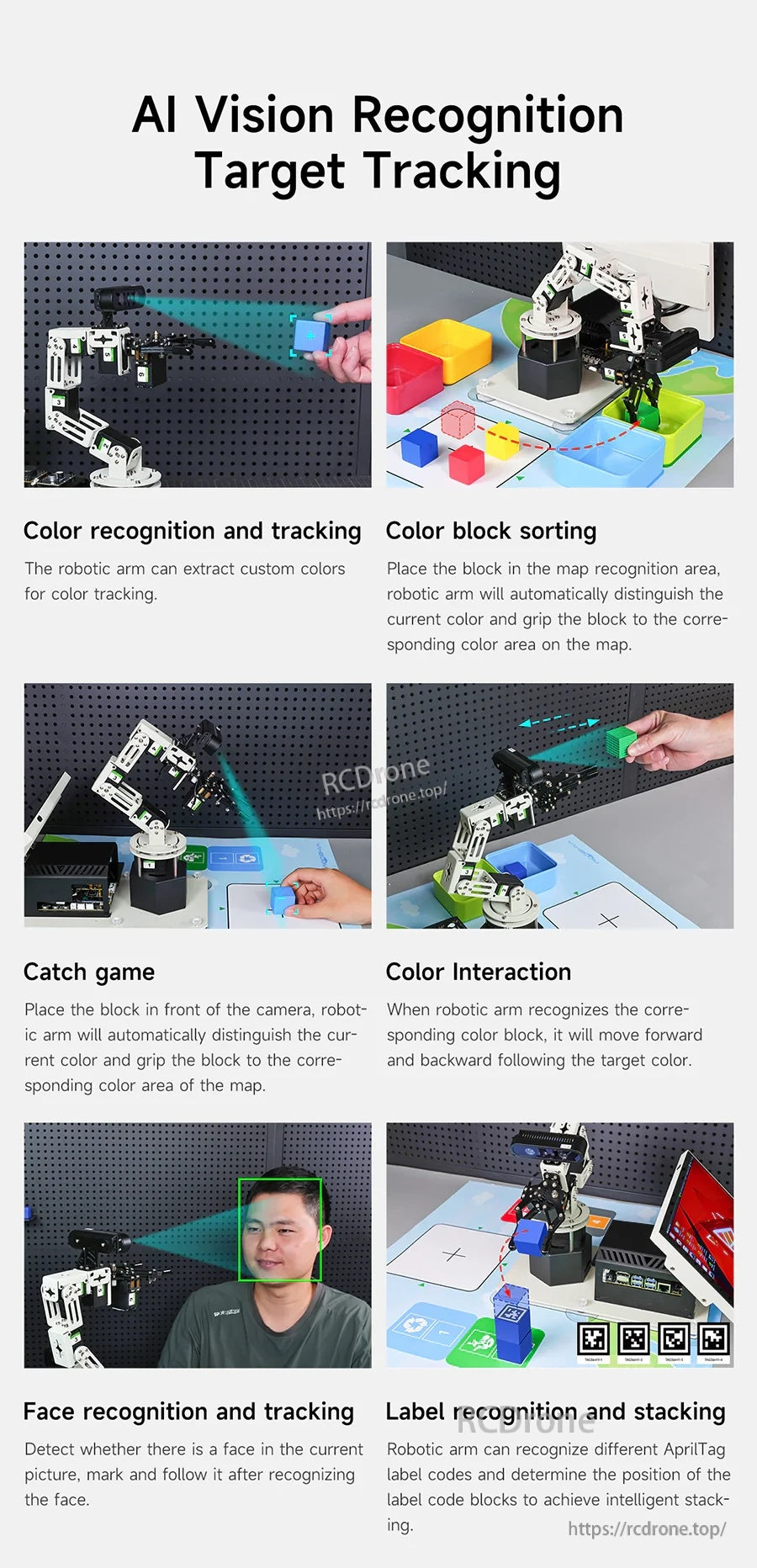
Los ejemplos de reconocimiento visual cubren el seguimiento basado en el color, la clasificación de bloques, juegos interactivos y apilamiento basado en etiquetas.
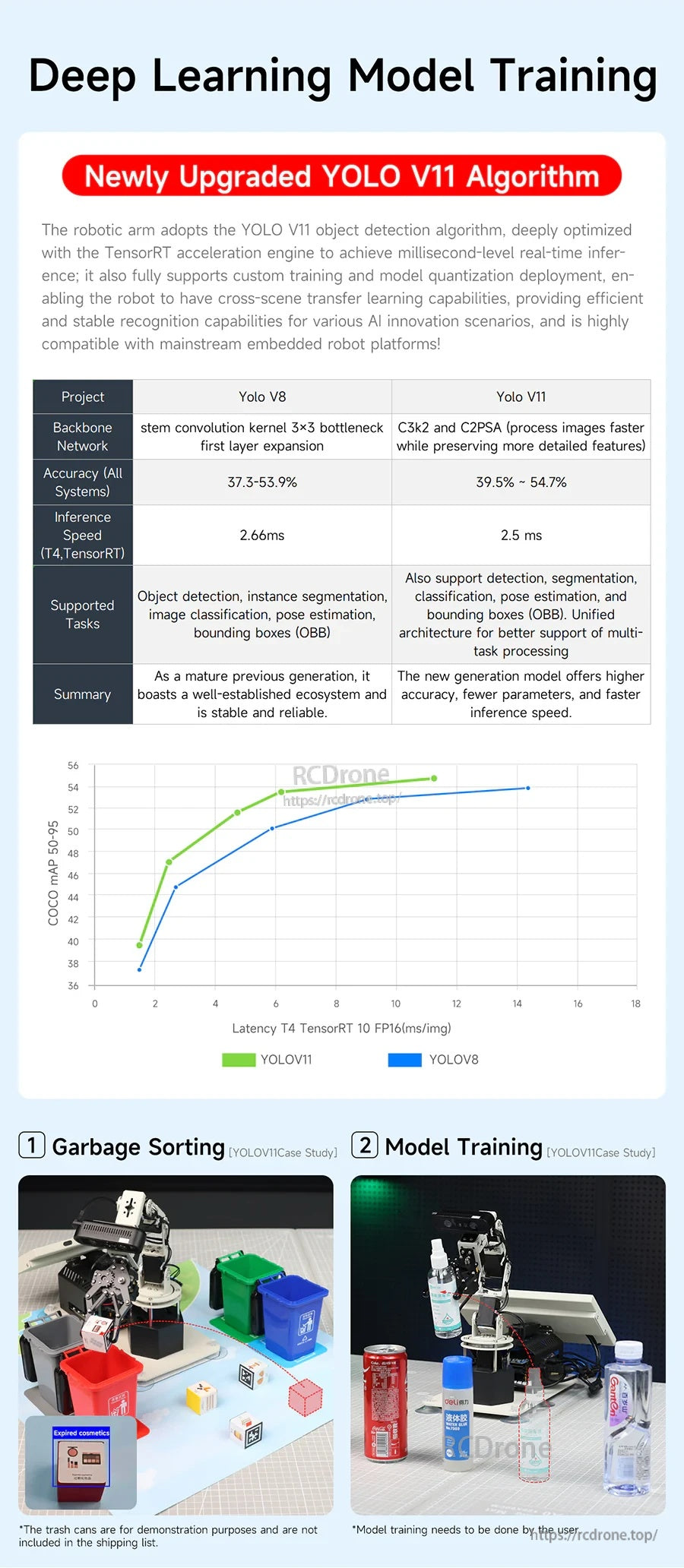
Las notas de entrenamiento y las curvas de rendimiento describen la dirección del flujo de trabajo de aprendizaje profundo incluido para tareas de detección de objetos.
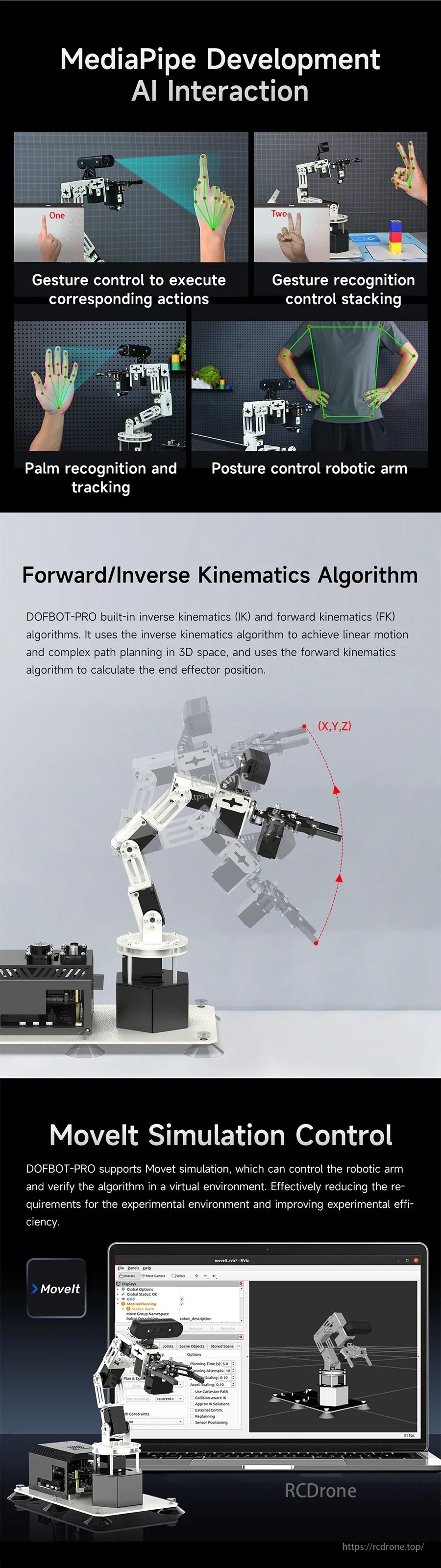
DOFBOT Pro admite interacción por gestos basada en MediaPipe, cinemática directa/inversa y control de simulación MoveIt para flujos de trabajo de configuración y desarrollo.
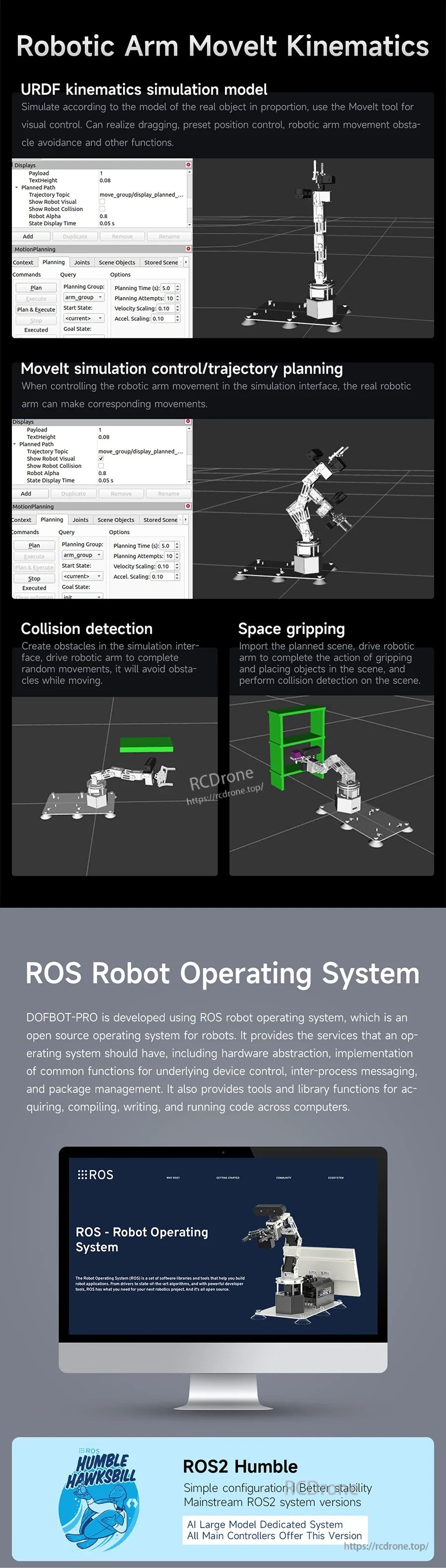
DOFBOT Pro admite simulación cinemática MoveIt con planificación de trayectorias, detección de colisiones y flujos de trabajo ROS/ROS2 (Humble) para control de movimiento.

DOFBOT Pro admite control de aplicaciones, control web y un control remoto inalámbrico USB, con un diseño de articulaciones de 6-DOF etiquetado como J1–J6 para una configuración precisa y planificación de movimiento.

El brazo robótico DOFBOT Pro de 6-DOF combina una placa de control basada en Jetson con una cámara de profundidad DaBai DCW2 y servos de bus serie inteligentes para proyectos de movimiento guiados por visión.
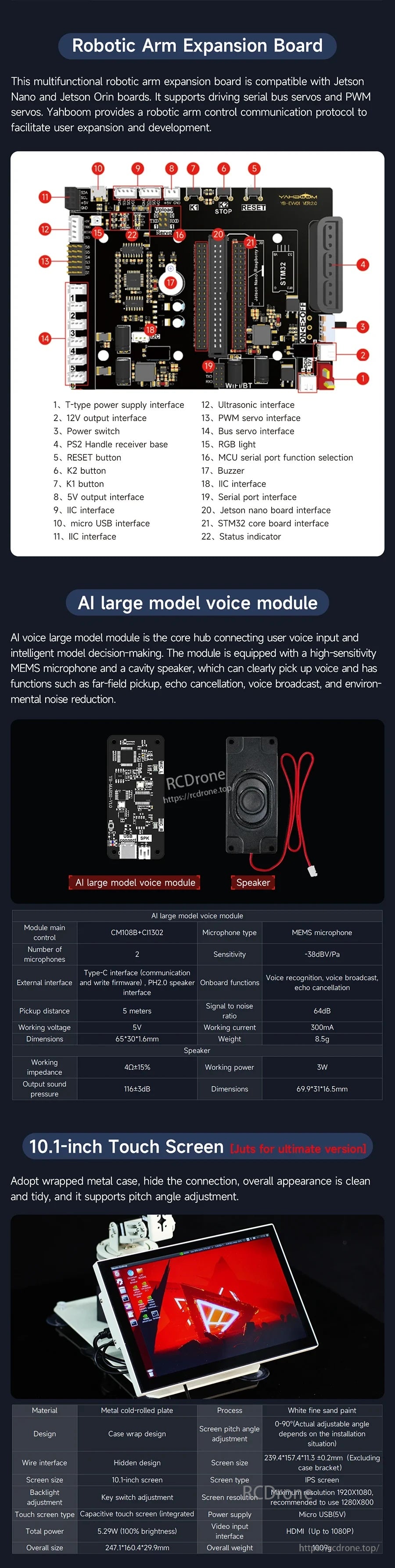
La configuración de DOFBOT Pro incluye un diseño de placa de expansión para el brazo robótico y admite complementos como un módulo de voz y una pantalla táctil de 10.1 pulgadas para el control.
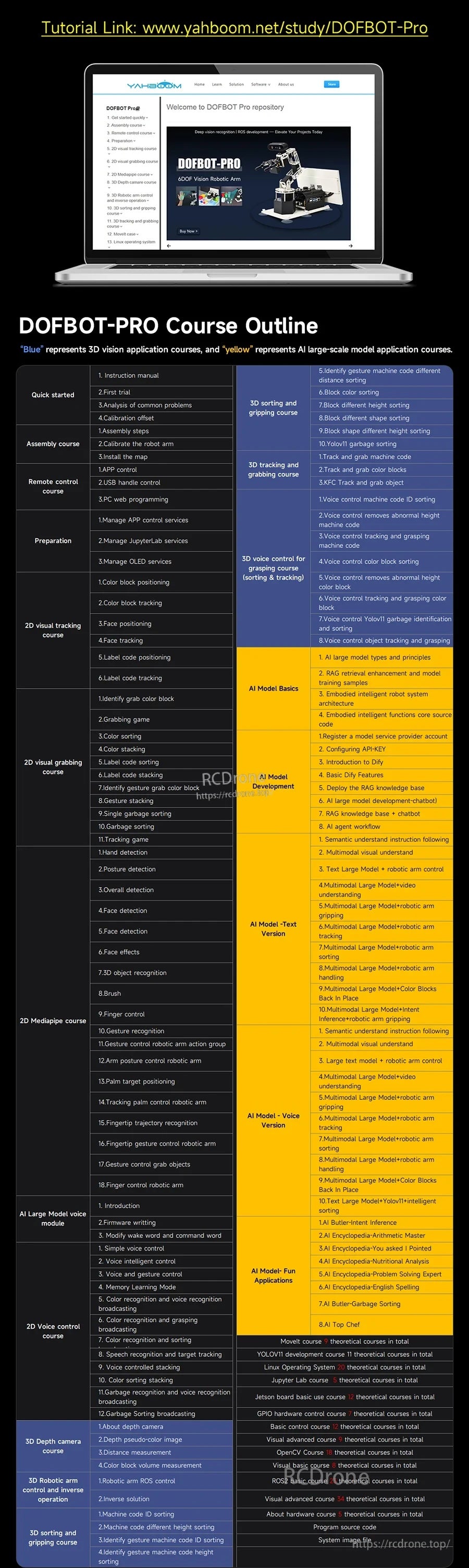
El esquema del curso DOFBOT-PRO desglosa los módulos de capacitación y los objetivos de aprendizaje para ayudar a planificar los pasos de configuración y desarrollo.
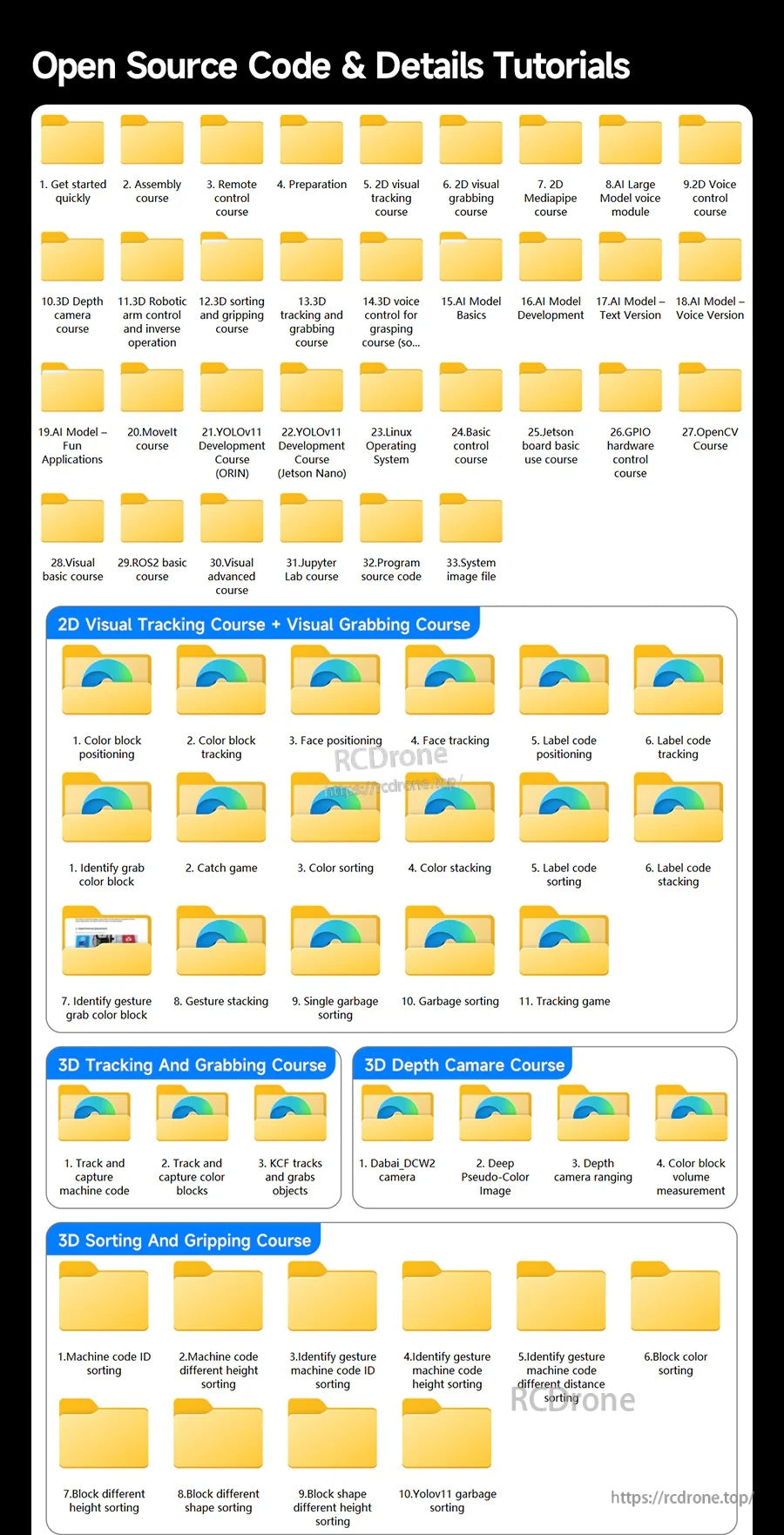
DOFBOT Pro incluye código abierto organizado y carpetas de tutoriales paso a paso que cubren seguimiento visual 2D/3D, clasificación y agarre, y flujos de trabajo de cámaras de profundidad.
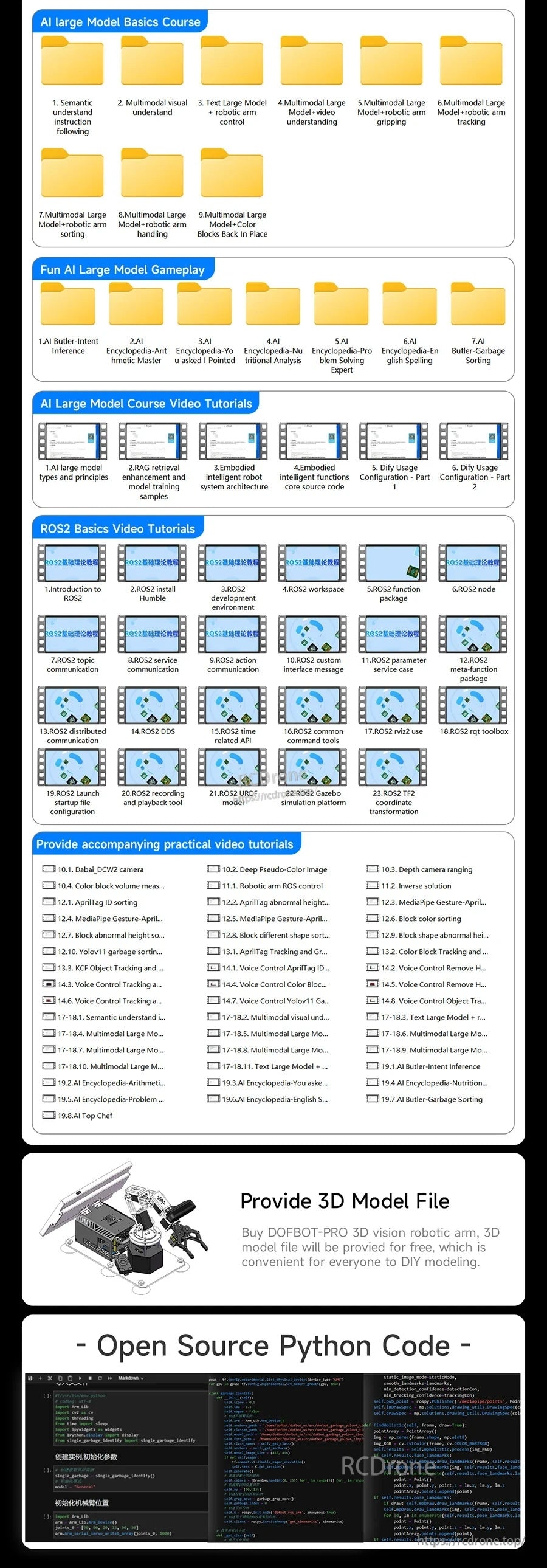
DOFBOT Pro incluye tutoriales en video descargables, materiales de aprendizaje de ROS2, un archivo de modelo 3D y código Python de código abierto para el desarrollo en placas Jetson.

Los dibujos de dimensiones y una visión general de las especificaciones te ayudan a planificar el espacio de montaje y la integración del sistema para el brazo robótico DOFBOT Pro 6-DOF.
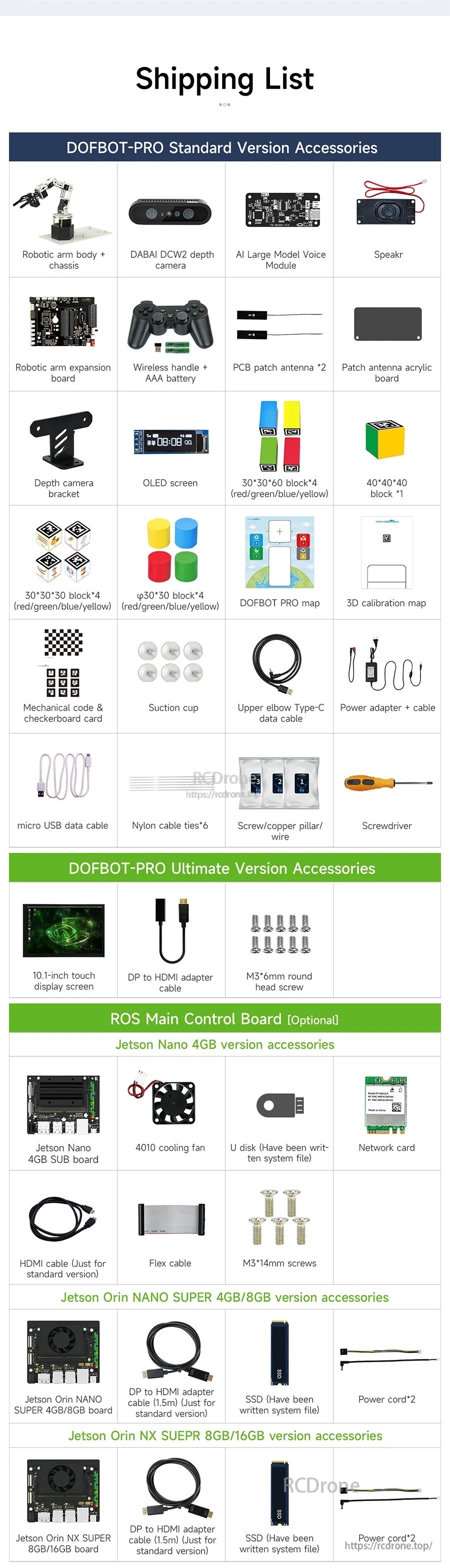
El kit DOFBOT Pro incluye el brazo robótico con un conjunto de accesorios estándar como hardware de controlador, cables de alimentación y datos, y herramientas básicas para el ensamblaje y la configuración.
Related Collections










































